|
感谢匿名的开源分享,感谢群友的热心帮助。 说什么四元数完全解析其实都是前辈们的解析,小弟真心是一个搬砖的,搬得不好希望大神们给以批评和指正,在此谢过了。因为本人是小菜鸟一枚,对,最菜的那种菜鸟······所以对四元数求解姿态角这么一个在大神眼里简单的算法,小弟我还是费了很大劲才稍微理解了那么一点点,小弟搬砖整理时也是基于小弟的理解和智商的,有些太基础,有些可能错了,大牛们发现了再骂过我后希望能够给与指正哈。 好,废话到此为止,开始说主体。四元数和姿态角怎么说呢?先得给和我一样的小菜鸟们理一理思路,小鸟我在此画了一个“思维导图”(我承认我画的丑),四元数解算姿态首先分为两部分理解:第一部分先理解什么是四元数,四元数与姿态角间的关系;第二部分要理解怎么由惯性单元测出的加速度和角速度求出四元数,再由四元数求出欧拉角。 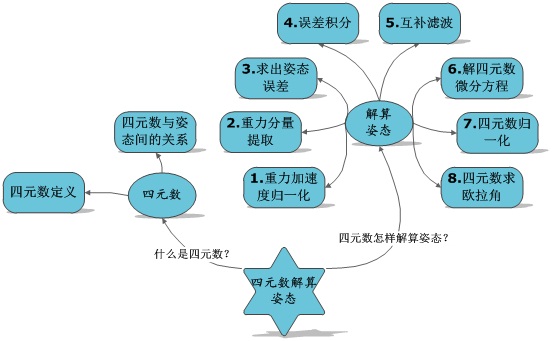
图1 渣渣思维导图 在讲解什么是四元数时,小弟的思维是顺着说的,先由四元数的定义说起,说到四元数与姿态角间的关系。但在讲解姿态解算时,小弟的思维是逆向的,就是反推回来的,从欧拉角一步步反推回到惯性器件的测量数据,这样逆向说是因为便于理解,因为实际在工程应用时和理论推导有很大差别。 实际应用时正确的求解顺序应该为图1中序号顺序,即1->2->3->……. 但在笔者讲解姿态求解时思路是如图2的。 
图2 逆向讲解思路 大家在看四元数时最好结合着代码一块看,小弟看的是匿名四轴的代码,感觉写的非常好也非常清晰,粘出来大家一块观摩。红色部分是核心代码,总共分为八个步骤,和图1中的八个步骤是一一对应的。讲解介绍时也是和代码对比起来讲解的。代码可以去匿名官网上下载,都是开源的,不是小弟的,所以小弟不方便加在附件中。 //四元数更新姿态 #define Kp 2.0f //加速度权重,越大则向加速度测量值收敛越快 #define Ki 0.001f //误差积分增益 void ANO_IMU::Quaternion_CF(Vector3f gyro,Vector3f acc, float deltaT) { Vector3f V_gravity, V_error, V_error_I; //1.重力加速度归一化 acc.normalize(); //2.提取四元数的等效余弦矩阵中的重力分量 Q.vector_gravity(V_gravity); //3.向量叉积得出姿态误差 V_error = acc % V_gravity; //4.对误差进行积分 V_error_I += V_error * Ki; //5.互补滤波,姿态误差补偿到角速度上,修正角速度积分漂移 Gyro += V_error * Kp + V_error_I; //6.一阶龙格库塔法更新四元数 Q.Runge_Kutta_1st(Gyro, deltaT); //7.四元数归一化 Q.normalize(); //8.四元数转欧拉角 Q.to_euler(&angle.x, &angle.y, &angle.z); } |
好的,下面搬砖开始!。。。。。。。。嘿咻嘿咻!!!!
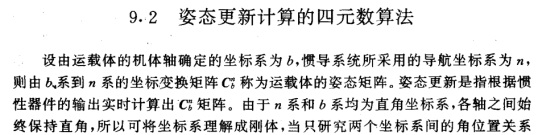
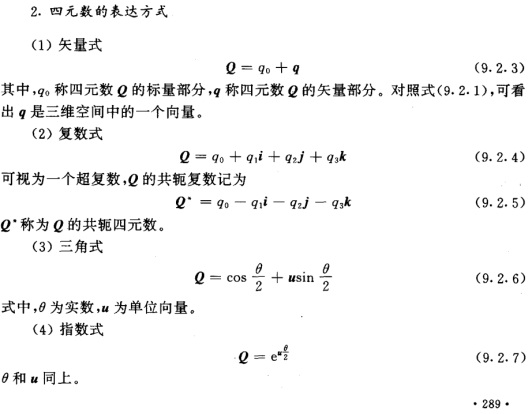
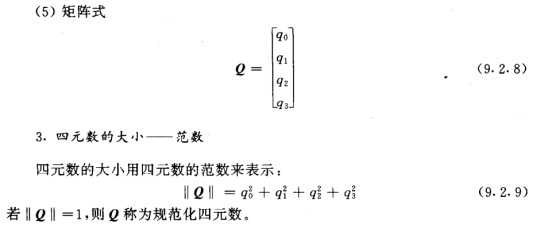
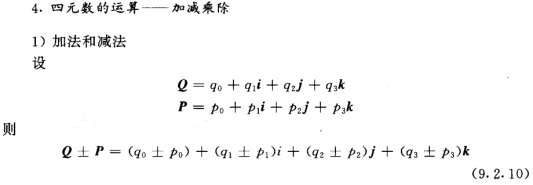
一. 什么是四元数?关于四元数的定义摘自秦永元的《惯性导航》,里面有非常好的讲解,大家可以直接看绪论和第九章就可以。下面我粘贴了部分原文,粘贴的比较多比较详细,应为本人比较笨还爱较真,所以按本人的风格就要详尽一点,大牛们都可以自动忽略。 四元数定义、表达方式及运算方法——摘自《惯性导航》-秦永元P289-292
|
好,关于四元数定义就搬这么多,其他的大家去附件下载《惯性导航》的pdf自己看吧。 下面开始搬四元数与姿态解算关系的。。。。。。嘿咻嘿咻~~~~
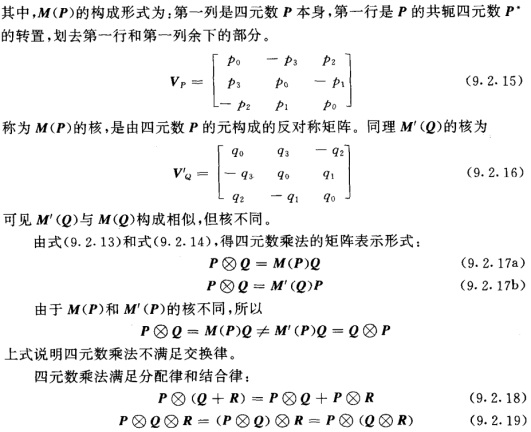
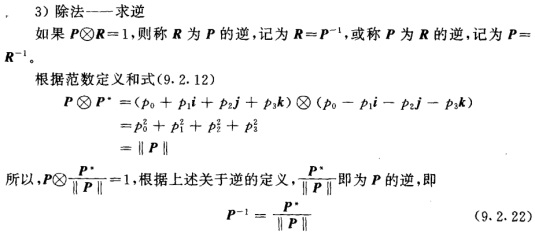
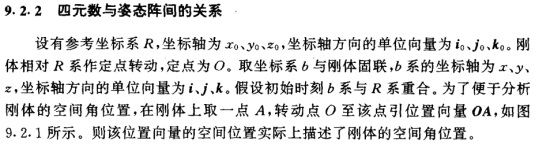
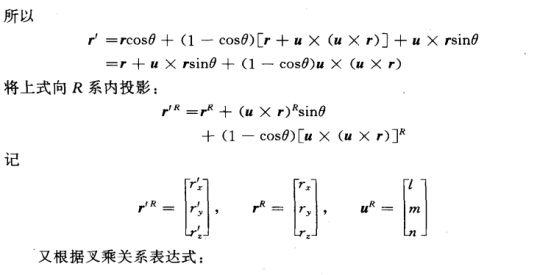
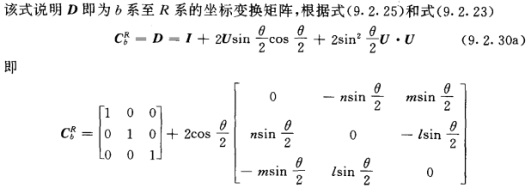
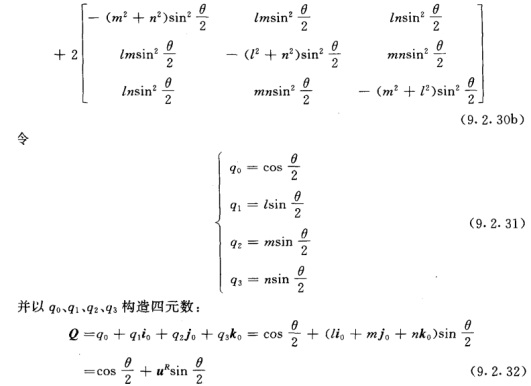
二、四元数与姿态阵间的关系从上面我们知道了四元数的定义,可这四个数和我们要求的三个姿态角有什么关系呢?下面是详细的推导,同样摘自《惯性导航》-秦永元P292-297。 四元数与姿态阵间的关系——摘自《惯性导航》-秦永元P292-297
|
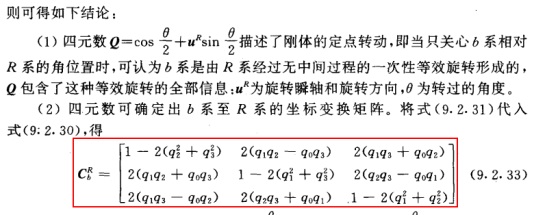
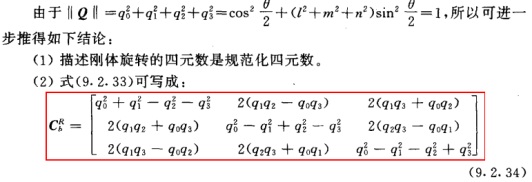
呃,粘了这么多其实就是为了想知道推导过程小伙伴好理解,真正有用的就是(9.2.34)这个公式。▲这个公式把四元数转换成了方向余弦矩阵中的几个元素,再用这几个元素转换为欧拉角。就求解除了姿态! 
先从四元数q0~q3转成方向余弦矩阵: 
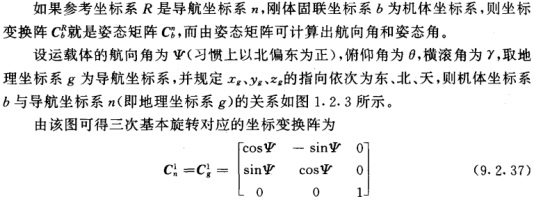
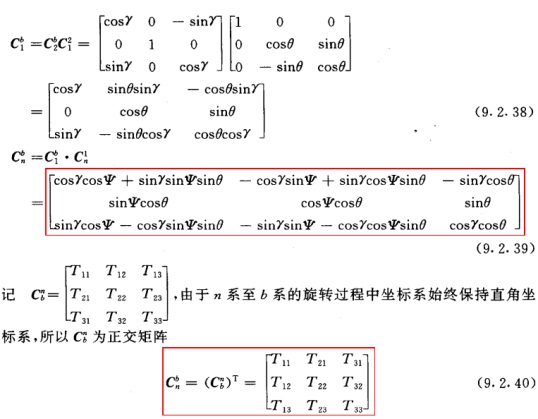
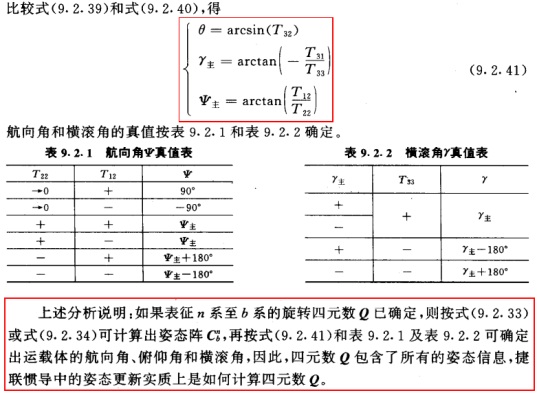
再从方向余弦矩阵转换为欧拉角: 


好的,公式原理都讲清楚了,下面来看一下匿名的代码: //四元数转欧拉角,这里四元数是q1~q4 和公式里q0~q3相对应。 void Quaternion::to_euler(float *roll, float *pitch, float *yaw) { if (roll) { *roll = degrees(atan2f(2.0f*(q1*q2 + q3*q4),1 - 2.0f*(q2*q2 + q3*q3))); //*roll = degrees(atan2f(-2.0f*(q2*q4 - q1*q3),1 - 2.0f*(q2*q2 + q3*q3))); } if (pitch) { // 使用safe_asin()来处理pitch接近90/-90时的奇点 *pitch = degrees(safe_asin(2.0f*(q1*q3 - q2*q4))); //*pitch = degrees(safe_asin(2.0f*(q3*q4 + q1*q2))); } if (yaw) { *yaw = degrees(atan2f(2.0f*(q2*q3 - q1*q4), 2.0f*(q1*q1 + q2*q2) - 1)); //*yaw = degrees(atan2f(2.0f*(q2*q3 - q1*q4), 2.0f*(q1*q1 + q3*q3) - 1)); } } |
对比余弦矩阵转换为欧拉角的公式很容易理解了吧,注意一下,红色是匿名原版的代码,和公式还是有出入的,自己细心观察一下吧。被注释了的黑色代码是我根据上面的公式写的。但黑色的求解出来的欧拉角反映出来的姿态是不对的,具体表现为俯仰(pitch)和横滚(roll)是相反的,为啥根据公式写的是不对的?群里的小伙伴给与了我热心的解答。 这个错误主要是由于方向余弦矩阵的旋转顺序不一样,也就是公式(9.2.39)不一样,这是由于旋转的先后顺序不同引起的,具体大家参考《惯性导航》绪论来看就能明白,因为这一点小弟还有点混乱,就点到这为止。 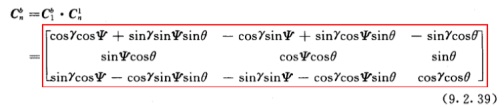
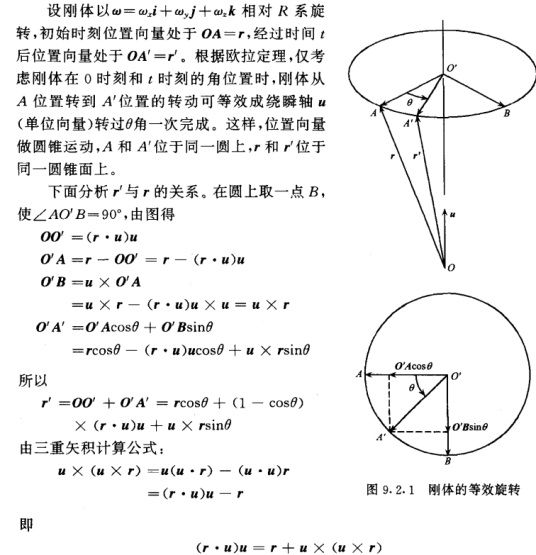
以上就是四元数求解欧拉角的方法。通过公式可以看到,要求欧拉角需要求得四元数的方向余弦矩阵;要求得四元数方向余弦矩阵,需要求得四元数q0~q3,那么如何求得q0~q3?接下来详细介绍。 三、四元数微分及龙格库塔求Q0~Q3首先我们先来看一下在程序里如何求解的q0~q3: //一阶龙格库塔法更新四元数 void Quaternion::Runge_Kutta_1st(Vector3f &g, float deltaT) { q1 += 0.5 * (-q2*g.x - q3*g.y - q4*g.z)* deltaT; q2 += 0.5 * (q1*g.x + q3*g.z - q4*g.y)* deltaT; q3 += 0.5 * (q1*g.y - q2*g.z + q4*g.x)* deltaT; q4 += 0.5 * (q1*g.z + q2*g.y - q3*g.x)* deltaT; } |
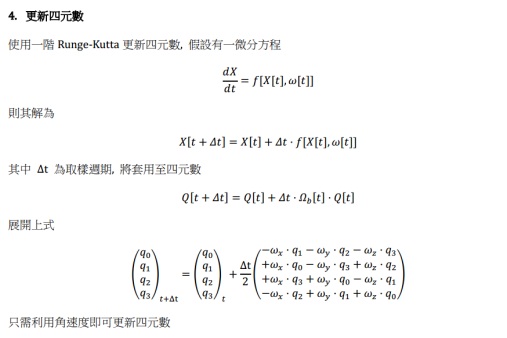
这就是一阶龙格库塔法求解q的微分方程,传入参数只需要这个周期的角速度g.x、g.y、g.z和周期时间deltaT。下面一张是从某位大神的贴吧上盗的图,描绘的是一阶龙格库塔的计算式。 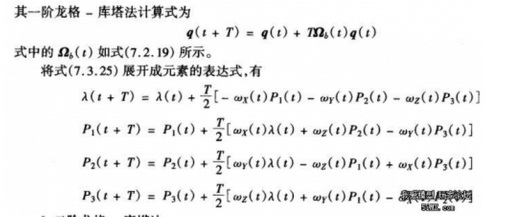
相信很多人和我一样,单看上图很难理解其中的意思和其由来,于是我又找了很多帖子,感谢前人做出的贡献,小弟在这里再次整理大神的四元数微分方程推导公式,便于大家理解。摘自附件中《推導_四元數.pdf》 虽然在下也不是很懂,不过粘出来还是能起到理解的作用,这样大家就不会觉得这是凭空变出来的,本人数学功底薄弱,没有对推导进行过验证,如果有不对的地方欢迎指正。 接着使用一阶龙格库塔(Runge-Kutta)发求出q0~q3,这一点很多人不知道一阶龙格库塔怎么推导的,下面也是这位网友的推导,大家参考着理解吧。 这里的角速度 是由捷联陀螺的输出(对机械转子陀螺必须经过误差补偿,将在下面介绍)。 是由捷联陀螺的输出(对机械转子陀螺必须经过误差补偿,将在下面介绍)。 对比着匿名四轴的代码看一看(g.x、g.y、g.z是捷联陀螺的输出),代码的意思就比较清楚了。在往上一步步推,我们就要求陀螺输出了,并且还要对数据进行互补滤波处理。 四、惯性单元测量值融合这部分看似很简单,但是也有让笔者难以理解的地方,希望后人能补充修正进行更好的讲解。有了上一步的龙格库塔方程,我们现在需要的就是角速度的测量值。 在四轴上安装陀螺仪,可以测量四轴倾斜的角速度,由于陀螺仪输出的是四轴的角速度,不会受到四轴振动影响。因此该信号中噪声很小。四轴的角度又是通过对角速度积分而得,这可进一步平滑信号,从而使得角度信号更加稳定。因此四轴控制所需要的角度和角速度可以使用陀螺仪所得到的信号。由于从陀螺仪的角速度获得角度信息,需要经过积分运算。如果角速度信号存在微小的偏差,经过积分运算之后,变化形成积累误差。这个误差会随着时间延长逐步增加,最终导致电路饱和,无法形成正确的角度信号。 如何消除这个累积误差呢?可以通过上面的加速度传感器获得的角度信息对此进行校正。利用加速度计所获得的角度信息 θg 与陀螺仪积分后的角度θ 进行比较,将比较的误差信号经过比例Tg 放大之后与陀螺仪输出的角速度信号叠加之后再进行积分。对于加速度计给定的角度θg ,经过比例、积分环节之后产生的角度θ必然最终等于θg 。由于加速度计获得的角度信息不会存在积累误差,所以最终将输出角度θ中的积累误差消除了。加速度计所产生的角度信息θg 中会叠加很强的有四轴运动加速度噪声信号。为了避免该信号对于角度θ 的影响,因此比例系数 Tg 应该非常小。这样,加速度的噪声信号经过比例、积分后,在输出角度信息中就会非常小了。由于存在积分环节,所以无论比例Tg多么小,最终输出角度θ必然与加速度计测量的角度θg相等,只是这个调节过程会随着Tg 的减小而延长。 先把这个过程的代码粘出来,看着代码一步步理解: #define Kp 2.0f //加速度权重,越大则向加速度测量值收敛越快 #define Ki 0.001f //误差积分增益 //1.重力加速度归一化 acc.normalize(); //2.提取四元数的等效余弦矩阵中的重力分量 Q.vector_gravity(V_gravity); //3.向量叉积得出姿态误差 V_error = acc % V_gravity; //4.对误差进行积分 V_error_I += V_error * Ki; //5.互补滤波,姿态误差补偿到角速度上,修正角速度积分漂移 Gyro += V_error * Kp + V_error_I; |
1.重力加速度归一化:加速度计数据归一化,把加速度计的三维向量转换为单位向量, 因为是单位矢量到参考性的投影,所以要把加速度计数据单位化,其实归一化改变的只是这三个向量的长度,也就是只改变了相同的倍数,方向并没有改变,也是为了与单位四元数对应。 2.提取四元数的等效余弦矩阵中的重力分量: // 返回该四元数的等效余弦矩阵中的重力分量 void Quaternion::vector_gravity(Vector3f &v) { v.x = 2*(q2*q4 - q1*q3); v.y = 2*(q1*q2 + q3*q4); v.z = 1-2*(q2*q2 + q3*q3); } |
将当前姿态的重力在三个轴上的分量分离出来,把四元数换算成方向余弦中的第三行的三个元素,根据余弦矩阵和欧拉角的定义,就是地理坐标系(参考坐标系)的Z轴的重力向量。当我读完这句话脑子挺懵的,闹不明白啊,于是又找到了下面的资料,可以进行解释了。 别忘了这是个正交矩阵哦!这样就知道代码怎么来的了吧?好继续。 3.向量叉积得出姿态误差: 哎呀,又来棘手问题了,这个我也不太明白怎么讲啊,还是把大神的讲解粘过来吧,大家看看是不是这么回事: acc是机体坐标参照系上,加速度计测出来的重力向量,也就是实际测出来的重力向量。 acc是测量得到的重力向量,V_gravity是陀螺积分后的姿态来推算出的重力向量,它们都是机体坐标参照系上的重力向量。 那它们之间的误差向量,就是陀螺积分后的姿态和加计测出来的姿态之间的误差。 向量间的误差,可以用向量叉积(也叫向量外积、叉乘)来表示,V_error就是两个重力向量的叉积。 这个叉积向量仍旧是位于机体坐标系上的,而陀螺积分误差也是在机体坐标系,而且叉积的大小与陀螺积分误差成正比,正好拿来纠正陀螺。(你可以自己拿东西想象一下)由于陀螺是对机体直接积分,所以对陀螺的纠正量会直接体现在对机体坐标系的纠正。 |
看了上面的话,小弟一直对这个误差向量感到莫名其妙,后来又找到大神的一下一段话: 这里误差没说清楚,不是指向量差。这个叉积误差是指将带有误差的加计向量转动到与重力向量重合,需要绕什么轴,转多少角度。逆向推理一下,这个叉积在机体三轴上的投影,就是加计和重力之间的角度误差。也就是说,如果陀螺按这个叉积误差的轴,转动叉积误差的角度(也就是转动三轴投影的角度)那就能把加计和重力向量的误差消除掉。(具体可看向量叉积的定义)如果完全按叉积误差转过去,那就是完全信任加计。如果一点也不转,那就是完全信任陀螺。那么把这个叉积的三轴乘以x%,加到陀螺的积分角度上去,就是这个x%互补系数的互补算法了。 |
这个看了好像终于理解点了,再看下代码: //3.向量叉积得出姿态误差 V_error = acc % V_gravity; |
这里“ % ”已经重定义为叉乘的算法了。 4.对误差进行积分: 积分求误差,关于当前姿态分离出的重力分量,与当前加速度计测得的重力分量的差值进行积分消除误差 V_error_I += V_error * Ki; |
5.互补滤波,姿态误差补偿到角速度上,修正角速度积分漂移 系数不停地被陀螺积分更新,也不停地被误差修正,它和公式所代表的姿态也在不断更新。 将积分误差反馈到陀螺仪上,修正陀螺仪的值。将该误差V_error输入 PI 控制器后与本次姿态更新周期中陀螺仪测得的角速度相加,最终得到一个修正的角速度值,将其输入四元数微分方程,更新四元数。 Gyro += V_error * Kp + V_error_I; |
Gyro就是得到的修正角速度值,可以用于求解四元数q0~q3了。 到这里回顾一下八个步骤还漏了一个第七步: 7.四元数归一化: 规范化四元数作用: 1.表征旋转的四元数应该是规范化的四元数,但是由于计算误差等因素,计算过程中四元数会逐渐失去规范化特性,因此必须对四元数做规范化处理。 2.意义在于单位化四元数在空间旋转时是不会拉伸的,仅有旋转角度.这类似与线性代数里面的正交变换。 3.由于误差的引入,使得计算的变换四元数的模不再等于1,变换四元数失去规范性,因此再次更新四元数。 计算欧拉角时候必须要对四元数归一化处理。
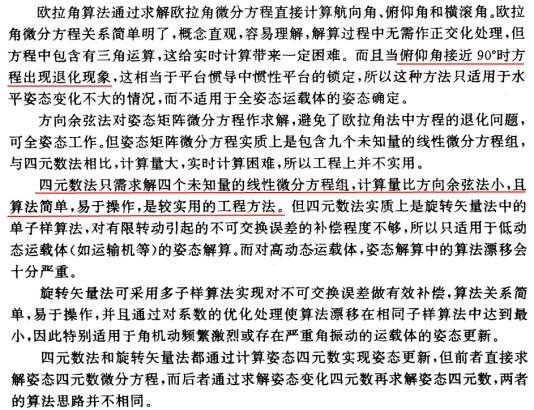
呃,关于四元数求解姿态的砖好像搬完了。为什么要用四元数法求解姿态呢?再搬一点关于欧拉角法和旋转矢量法的介绍的。
搬砖搬得好累啊,不过搬得差不多了,感觉挺乱的?呃,主要是由于比较多吧,那我再串一遍?拉倒吧,你看得都累,我写着不累?没闹明白再自己串一遍吧,相信第二遍就能明白了。 哎~对于我这样的渣渣而言也就能理解到这一步了,这也是我好几天的心血整理了一下,也许有和我一样的菜鸟呢,对他们也许能有点帮助,做得不好希望大神们能耐心给与指正,而不是嗤之以鼻,或者喷我一顿就走。。。毕竟整理了两天呢(我还以为一中午就能搞定呢)。渣渣的学习之路也是挺不容易的,因为基础渣渣,学校渣渣,所以难以得到有效地帮助和指导,有时在群里寻求帮助,无聊的群友会告诉你看书去,呵呵。。。我也知道看书啊。。。哪怕你能告诉我我的问题在那本书的那部分能有相似吧?一句看书去,上网查啊,等于没回答,如果一直这样自己看下去可能半年也解决不了,因为渣渣的学习环境是有局限性的。 不过好在有更多很热心的群友能提供给我帮助,把他们收集的好贴发给我,或者干脆手写一个公式推导,一个电路图,然后拍照发给我,还有的帮我下载照片,分类命名给我,艾玛!热泪盈眶啊有木有!!!再次感谢这些热心帮助我的小伙伴@奇点,@杜掌柜,@廉价物品,@忘记名字的小伙伴······ 下面附上被我搬砖的几个好贴,谢谢大神们的乐于分享: |