代码电路参考百度多个作者修改而成,如有侵犯,请联系本人,立即删除。
本作品仅供学习参考,不喜勿喷,退出即可。
主要功能:
红外遥控,开灯关灯,调风扇的速度。
自动调光,自动温度调速。
蜂鸣器报警风速极限。液晶屏显示温度数值与光敏电阻电压数值。
资料内含代码与电路
本次课题得名称主要是由***提出,夏天天气很热宿舍风扇转得又不快,然后要按时熄灯。工作又没做完,想要有一个凉快得夏天,还要自动得调光系统方便学习,并且保护眼睛。那这就是舒适得桌面环境了。所以就有这个课题。
电路分析: 主要功能: 红外遥控,开灯关灯,调风扇的速度。自动调光,自动温度调速。 蜂鸣器报警风速极限。液晶屏显示温度数值与光敏电阻电压数值。 整体模块: 
详细分析: 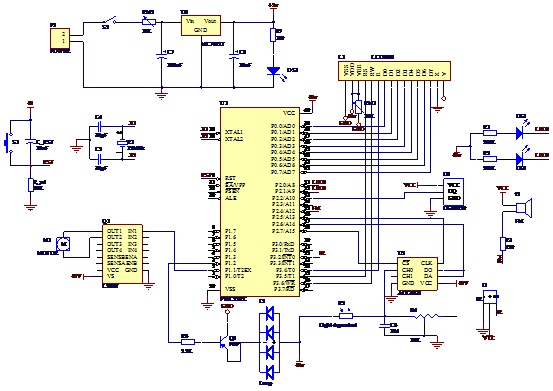
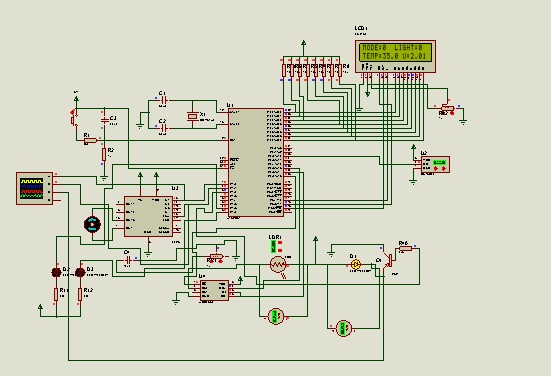
电源模块:由12v转5v,使用7805降压芯片。 复位电路、晶振电路:这两个电路加上STC89C52RC构成控制电路,即51单片机最小系统。 显示模块:lcd 1602液晶显示屏,其电阻RM是调背光亮度,显示温度,电压,模式。 温度模块:使用DS18B20,对温度进行采集。 光敏电阻:对光线强弱控制。 A/D模块:使用A/D C0832模数转换芯片,对光敏测量出光敏电阻阻值。 电机驱动模块:使用L298N电路稳压。 红外遥控:使用红外传感器,实现对电路共能得控制。 可以改进的地方: 硬件布局方面: 飞线应该减少,可以将两个板子合成一个板子。 软件:应该实现程序优化。
物品清单:
完成效果图: 实物图:  
Protuse实现:
单片机源程序如下: - /*-------------------------------------------------------------------
- 程序名称: 在1602液晶上显示出DS18B20的温度与光敏电阻电压
- 自动功能: | 手动功能:
- 根据温度的数值控制风速 | 红外控制风速
- 根据光的亮暗控制光线的强弱 | 红外控制灯的亮暗
- -------------------------------------------------------------------*/
- #include <reg52.h>
- #include <intrins.h>
- #define uint unsigned int
- #define uchar unsigned char
- #define P0 P0
- sbit ds=P2^2; //定义DS18B20通信端口
- sbit lcd_rs = P3^5; //定义LCD控制端口
- sbit lcd_rw = P3^6;
- sbit lcd_en = P3^4;
- sbit IN1=P1^0; //电机
- sbit M_pwm=P1^1;
- sbit fm=P2^4;
- sbit ir=P3^2; //红外
- sbit led=P1^2; //台灯
- sbit led1=P2^0; //风扇指示灯
- sbit led2=P2^1; //台灯指示灯
- sbit CS=P2^7; //AD芯片的定义口
- sbit CLK=P2^5;
- sbit DIO=P2^6;
- uint temp,temp1; //温度值定义
- bit flag; //温度中的标志位
- uchar code mun_to_char[] = {"0123456789ABCDEF"}; //定义数字跟ASCII码的关系
- uchar data lcd1602_line1[]={"MODE:0 LIGHT:0 "}; //LCD1602液晶第一行
- uchar data lcd1602_line2[]={"TEMP:00.0 U:0.0 "}; //LCD1602液晶第二行。注意:用空格补位
-
- uint AD_val; //电压值
- uchar irtime; //用于计数时间
- uchar ircode[4]; //储存数据码
- uchar irdata[33]; //1引导码 8位客户1 8位客户2 8位操作码 8位操作反码
- bit startflag,irok,irprosok; //设置中断标志位 接收成功标志位 处理成功标志
- uchar bitnum; //位数值
- uchar num,pwm1,n,num2;
- uint pwm2;
- /*------------------------------------------------------------------------------
- 延时函数
- ------------------------------------------------------------------------------*/
- void delayus(uint t) //微秒级的延时函数
- {
- while(t--);
- }
- void delayms(uint ms) //毫秒级的延时函数
- {
- uchar i;
- while(ms--)
- {
- for(i=0;i<120;i++);
- }
- }
- /*------------------------------------------------------------------------------
- AD转换
- ------------------------------------------------------------------------------*/
- unsigned char AD(void)
- {
- unsigned char i,dat;
- CS=1; //一个转换周期开始
- CLK=0; //第一个脉冲做准备
- CS=0; //CS置0,片选有效
- DIO=1; //规定的起始信号
- CLK=1; //第一个脉冲
- CLK=0; //第一个脉冲下降沿,此前DIO必须是高电平
- DIO=1; //DIO置1,通道选择信号
- CLK=1; //第二个脉冲,第2、3个脉冲下沉之前,DI必须跟别的输入两位数据用于选则通道
- CLK=0; //第二个脉冲下降沿
- DIO=0; //DI置0,选择通道0
- CLK=1; //第三个脉冲
- CLK=0; //第三个脉冲下降沿
- DIO=1; //第三个脉冲下沉之后,输入端DIO失去作用,应置1
- CLK=1; //第四个脉冲
- for(i=0;i<8;i++)
- {
- CLK=1; //第四个脉冲
- CLK=0;
- dat<<=1; //将下面储存的低位数据向右移
- dat|=(unsigned char)DIO; //将输出数据DIO通过或运算储存在dat最低位
- }
-
- CS=1; //片选无效
- return dat; //将读出的数据返回
- }
- /*------------------------------------------------------------------------------
- 蜂鸣器
- ------------------------------------------------------------------------------*/
- void bee()
- {
- fm=0;
- delayms(100);
- fm=1;
- delayms(100);
- }
- /*------------------------------------------------------------------------------
- 红外遥控
- ------------------------------------------------------------------------------*/
- void timer0init(void)//定时器0初始化 256*(1/12m)*12=0.256ms
- {
- TMOD=0x02;//定时器0工作方式2,TH0是重装值,TL0是初值
- TH0=0x00; //重载值
- TL0=0x00; //初始化值
- ET0=1; //开中断
- TR0=1;
- }
- /////////////////////////////////////////////////////////////////////
- //定时器0中断服务函数
- /////////////////////////////////////////////////////////////////////
- void tim0_isr (void) interrupt 1 using 1 //定时器0中断服务函数
- {
- irtime++; //用于计数2个下降沿之间的时间
- num++;
- num2++;
- if(num>62)
- {
- num=0;
- }
- if(num<=pwm1)
- {
- M_pwm=1;
- }
- else
- {
- M_pwm=0;
- }
- }
- void int0init(void) //外部中断0初始化
- {
- IT0 = 1; //指定外部中断0下降沿触发,INT0 (P3.2)
- EX0 = 1; //使能外部中断
- EA = 1; //开总中断
- }
- void int0 () interrupt 0 //外部中断0服务函数
- {
- if(startflag)
- {
- if(irtime>32&&irtime<63) //8-16ms
- {
- bitnum=0;
- }
- irdata[bitnum]=irtime;
- irtime=0;
- bitnum++;
- if(bitnum==33)
- {
- bitnum=0;
- irok=1;
- }
- }
- else
- {
- irtime=0;
- startflag=1;
- }
- }
- /*------------------------------------------------------------------------------
- 红外码值处理
- ------------------------------------------------------------------------------*/
- void irpros(void) // 红外码值处理
- {
- uchar mun,k,i,j;
- k=1;
- for(j=0;j<4;j++)
- {
- for(i=0;i<8;i++)
- {
- mun=mun>>1;
- if(irdata[k]>6)
- {
- mun=mun | 0x80;
- }
- k++;
- }
- ircode[j]=mun;
- }
- irprosok=1;
- }
- /*------------------------------------------------------------------------------
- PWM控制
- ------------------------------------------------------------------------------*/
-
- void temp_pwm()
- {
-
- if(n==1)
- {
- lcd1602_line1[6] = mun_to_char[1];
- if(pwm1<62)
- {
- IN1=1;
- pwm1++;
- delayms(100);
- }
- else
- {
- bee();
- }
-
- }
- if(n==3)
- {
- lcd1602_line1[6] =mun_to_char[2] ;
- if(pwm1>1)
- {
- IN1=1;
- pwm1--;
- delayms(100);
- }
- else
- {
- bee();
- }
- }
- if(n==5) //停止
- {
-
- led1=1;
- IN1=0;
- pwm1=0;
- }
- if(n==2)
- {
- pwm1=31;
- delayms(100);
- }
- }
- void led_pwm()
- {
- if(n==6)
- {
- lcd1602_line1[14] =mun_to_char[1] ;
- if(pwm2<800)
- {
- pwm2++;
- delayms(100);
- }
- }
- else
- {
- bee();
- }
- if(n==7)
- {
- lcd1602_line1[14] =mun_to_char[2] ;
- if(pwm2>1)
- {
- pwm2--;
- delayms(100);
- }
- }
- else
- {
- bee();
- }
- }
- /*------------------------------------------------------------------------------
- 红外键值处理
- ------------------------------------------------------------------------------*/
- void ir_work(void) //红外键值处理
- {
- switch(ircode[2]) //判断操作码(第三个数码值)
- {
-
- case 0x19:bee();break; // 0
- case 0x45:n=1;temp_pwm();break; //加速 1
- case 0x47:n=3;temp_pwm();break; //减速 3
- case 0x46:n=2;temp_pwm();break; //复位 2
- case 0x1c:n=4;break; //自动模式 ok
- case 0x44:n=5;break; //关闭点击 4
- case 0x07:led=0;break; //关灯 8
- case 0x15:led=1;break; //开灯 7
- case 0x08:n=6;led_pwm();break; //调亮 <
- case 0x5a:n=7;led_pwm();break; //调亮 >
- case 0x16:n=8;break; //自动 *
- default:break;
- }
- irprosok=0; //处理完成标志
- }
- /*------------------------------------------------------------------------------
- 单总线初始化函数(温度)
- ------------------------------------------------------------------------------*/
- void ds_reset() //单总线初始化函数
- {
- ds=1;
- delayus(5);
- ds=0;
- delayus(80);
- ds=1;
- delayus(14);
- if(ds==0)
- flag=1;
- else
- flag=0;
- delayus(20);
- }
- /*------------------------------------------------------------------------------
- 读时隙(即位读取)函数 (温度)
- ------------------------------------------------------------------------------*/
- bit ds_read_bit() //读时隙(即位读取)函数
- {
- bit dat;
- ds=0;
- _nop_();
- _nop_();
- ds=1;
- _nop_();
- dat=ds;
- delayus(10);
- return dat;
- }
- /*------------------------------------------------------------------------------
- 读一个字节函数
- ------------------------------------------------------------------------------*/
- uchar ds_read_byte() //读一个字节函数
- {
- uchar i,j,k;
- for(i=0;i<8;i++)
- {
- j=ds_read_bit();
- k=(j<<7)|(k>>1);
- }
- return k;
- }
- /*------------------------------------------------------------------------------
- 写一个字节函数
- ------------------------------------------------------------------------------*/
- void ds_write_byte(uchar dat) //写一个字节函数
- {
- uchar i;
- for(i=0;i<8;i++)
- {
- ds=0;
- _nop_();
- ds=dat&0x01;
- delayus(6);
- ds=1;
- dat=dat>>1;
- }
- delayus(6);
- }
- /*------------------------------------------------------------------------------
- 读取温度函数
- ------------------------------------------------------------------------------*/
- uint read_temperature() //读取温度函数
- {
-
- uchar a,b;
- ds_reset();
- EA=0;
- ds_write_byte(0xcc);
- ds_write_byte(0xbe);
- a=ds_read_byte();
- b=ds_read_byte();
- temp=b;
- temp=temp<<8;
- temp=temp|a;
- temp=temp*0.0625*10+0.5;
- EA=1;
- return temp;
- }
- /*------------------------------------------------------------------------------
- 1602液晶显示
- ------------------------------------------------------------------------------*/
- void lcd_delay(uchar x) //LCD1602 延时
- {
- uint i,j;
- for(i=x;i>0;i--)
- {
- for(j=120;j>0;j--);
- }
- }
- /*------------------------------------------------------------------------------
- LCD1602 命令字写入
- ------------------------------------------------------------------------------*/
- void write_com(uchar com) //LCD1602 命令字写入
- {
- lcd_rs = 0;
- lcd_rw = 0;
- lcd_en = 0;
- P0 = com;
- lcd_en = 1;
- lcd_delay(5);
- lcd_en = 0;
- }
- /*------------------------------------------------------------------------------
- LCD1602 初始化
- ------------------------------------------------------------------------------*/
- void lcd_init() //LCD1602 初始化
- {
- write_com(0x38);
- write_com(0x08);
- write_com(0x01);
- write_com(0x06);
- write_com(0x0c); //开显示,不显示光标
- }
- /*------------------------------------------------------------------------------
- LCD1602 字符写入
- ------------------------------------------------------------------------------*/
- void lcd_char_write(uchar x_pos,y_pos,lcd_dat) //LCD1602 字符写入
- {
- x_pos &= 0x0f; // X位置范围 0~15
- y_pos &= 0x01; // Y位置范围 0~ 1
- if(y_pos==1) x_pos += 0x40;
- x_pos += 0x80;
- write_com(x_pos);
- lcd_delay(5);
- lcd_rs = 1;
- lcd_rw = 0;
- lcd_en = 0;
- P0 = lcd_dat;
- lcd_en = 1;
- lcd_en = 0;
- P0 = 0xff; //释放数据端口
- }
- void main()
- {
- uchar i;
- float adnum;
- lcd_en=0; //关闭1602液晶使能,防止1602数据端影响单片机P0口输出
- led=0;
- P0=0xff;
- int0init(); //外部中断初始化
- timer0init(); //定时器初始化
- pwm2=400;
- num=0;
- pwm1=31;
- lcd_init(); //LCD1602 初始化
-
- while(1)
- {
- ds_reset(); //单总线初始化
- ds_write_byte(0xcc); //跳线ROM
- ds_write_byte(0x44); //启动温度传换
- AD_val=AD(); //读取电压的数值
- temp1=read_temperature(); //读取当前温度值
- lcd1602_line2[5] = mun_to_char[temp1/100]; //把当前温度分解送到1602显示
- lcd1602_line2[6] = mun_to_char[temp1%100/10];
- lcd1602_line2[8] = mun_to_char[temp1%10];
- lcd1602_line2[12] = mun_to_char[AD_val/51];
- lcd1602_line2[14] = mun_to_char[((AD_val%51)*100/51)/10];
- lcd1602_line2[15] = mun_to_char[((AD_val%51)*100/51)%10];
- for(i=0;i<16;i++) lcd_char_write(i,0,lcd1602_line1[i]);
- for(i=0;i<16;i++) lcd_char_write(i,1,lcd1602_line2[i]);
- //
- // if(temp1>260&&temp1<350) IN1=1;
- // else IN1=0;
- if(n==4)
- {
- lcd1602_line1[5] = mun_to_char[1];
- lcd1602_line1[6] =mun_to_char[0] ;
- led1=0;
- if(temp1>250&&temp1<280) pwm1=31;
- if(temp1>290&&temp1<310) pwm1=40;
- if(temp1>310&&temp1<350) pwm1=50;
- if(temp1>10&&temp1<200) pwm1=20;
- }
- if(n==5)
- {
- lcd1602_line1[5] = mun_to_char[2];
- lcd1602_line1[6] =mun_to_char[0] ;
- led1=1;
- IN1=0;
- pwm1=2;
- }
- adnum=(AD_val/51);
- if(n==8)
- {
- if(adnum>3&&adnum<5){led=1;led2=0;}
- if(adnum>0&&adnum<2){led=0;led2=1;}
- }
-
- if(irok==1) //如果红外编码接收好了,
- {
- irpros(); //进行红外码值处理。
- irok=0;
- }
-
- if(irprosok==1) //如果红外码值处理好后,
- {
- ir_work(); //进行工作处理。
- }
- }
- }
word格式的以上资料51hei提供下载: |