#include <reg52.h>
bit cmdArrived = 0; //命令到达标志,即接收到上位机下发的命令
unsigned char cmdIndex = 0; //命令索引,即与上位机约定好的数组编号
unsigned char cntTxd = 0; //串口发送计数器
unsigned char *ptrTxd = 0; //串口发送指针
unsigned char array1[] = "1-Hello!\r\n";
unsigned char array2[] = {'2', '-', 'H', 'e', 'l', 'l', 'o', '!', '\r', '\n'};
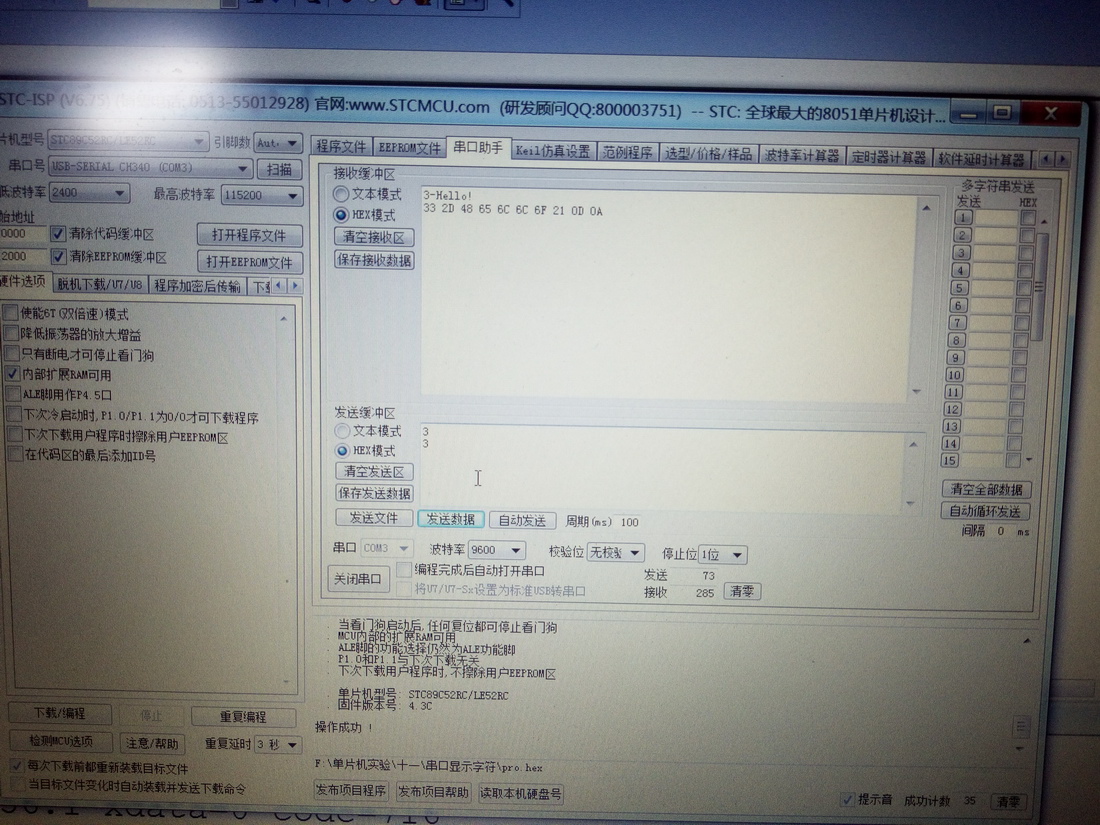
unsigned char array3[] = {51, 45, 72, 101, 108, 108, 111, 33, 13, 10};
unsigned char array4[] = "4-Hello!\r\n";
void ConfigUART(unsigned int baud);
void main ()
{
ConfigUART(9600); //配置波特率为9600
EA = 1; //开总中断
while(1)
{
if (cmdArrived)
{
cmdArrived = 0;
switch (cmdIndex)
{
case 1:
ptrTxd = array1; //数组1的首地址赋值给发送指针
cntTxd = sizeof(array1); //数组1的长度赋值给发送计数器
TI = 1; //手动方式启动发送中断,处理数据发送
break;
case 2:
ptrTxd = array2;
cntTxd = sizeof(array2);
TI = 1;
break;
case 3:
ptrTxd = array3;
cntTxd = sizeof(array3);
TI = 1;
break;
case 4:
ptrTxd = array4;
cntTxd = sizeof(array4) - 1;//字符串长度为数组长度减1
TI = 1;
break;
default:
break;
}
}
}
}
void ConfigUART(unsigned int baud) //串口配置函数,baud为波特率
{
SCON = 0x50; //配置串口为模式1
TMOD &= 0x0F; //清零T1的控制位
TMOD |= 0x20; //配置T1为模式2
TH1 = 256 - (11059200/12/32) / baud; //计算T1重载值
TL1 = TH1; //初值等于重载值
ET1 = 0; //禁止T1中断
ES = 1; //使能串口中断
TR1 = 1; //启动T1
}
void InterruptUART() interrupt 4
{
if (RI) //接收到字节
{
RI = 0; //手动清零接收中断标志位
cmdIndex = SBUF; //接收到的数据保存到命令索引中
cmdArrived = 1; //设置命令到达标志
}
if (TI) //字节发送完毕
{
TI = 0; //手动清零发送中断标志位
if (cntTxd > 0) //有待发送数据时,继续发送后续字节
{
SBUF = *ptrTxd; //发出指针指向的数据
cntTxd--; //发送计数器递减
ptrTxd++; //发送指针递增
}
}
}