目录
第一章 引言 1
11 概述 1
12 论文结构 2
第二章 设计原理 3
21 车模直立原理 3
22 平衡控制 4
23 速度控制 8
24 方向控制 9
第三章 电路设计 11
31 电源模块设计 11
32 电机驱动 12
33 传感器模块 13
331 加速度计 13
332 陀螺仪 13
333 电感运放 14
334 速度传感器模块 14
第四章 机械设计 15
41 电池的安装 15
42 电感的安装 15
43 干簧管的安装 15
45 陀螺仪与加速度计的安装 15
46 电路板的固定及安装 15
第五章 软件设计 17
51 整体框架 17
52 控制算法 18
521 角度控制 18
522 方向控制 19
523 速度控制 19
第六章 各项参数
21 第七章 结论
22 参考文献
I 附录 A 程序核心源代码 II
第一章 引言
1.1 概述
全国大学生智能汽车竞赛以智能汽车为研究对象,是倡导创新与发展的的 科技类竞赛,在全国范围内具有很大的影响力与规模。厦门大学智能车队今年 也继续在学校的支持下,积极地参与了本次竞赛,我们南强至诚队作为电磁直 立组别队伍,经过一年的备赛,即将迎来最后的决赛。
本届比赛中电磁组使用直立车模,跑道上有直线道路、曲线道路、十字交 叉路口、坡道等元素,具有一定难度。但是通过老师和学长学姐的耐心指导, 以及我们日日夜夜的学习和研究,我们最终完成了一套合理高效的设计方案。 在这份技术报告中,详细阐述了我们在算法、电路、机械、参数等方面的设计, 凝聚了我们的汗水与心血。
近一年的备赛过程,大大提高了我们在控制、信号处理、单片机、电路等 方面的知识储备量,加强了我们的自主学习与文献查找的能力,也提升了我们 的团队意识、上进心与责任感。最后,我们由衷地对大力支持此项竞赛的学校 表示感恩,也对一路走来的老师和队友们表示感谢。
1.2 论文结构
第二章 设计原理

2.1 车模直立原理
据比赛规则可知,存在许多方案使车模保持直立。由于只有两个由电机驱 动的后轮,因此从控制角度可把车模作为控制对象,它的控制输入量是两个电 机的速度。车模运动的目的可分解为三个基本任务:
a.车模的平衡控制 b.车模的方向控制 c.车模的速度控制

图 2.1 车模运动分解 三个分解后的任务可视作是各自独立的,然而由于最终都是面向同一个控制对象,所以它们之间存在着耦合。为了方便分析,在分析其中某一方面时假 设其它控制对象都已经达到稳定。比如在速度控制时,需要车模已经能够保持直立控制和方向控制稳定;在方向控制的时候,需要车模能够保持平衡和速度恒定;同样,在车模平衡控制时,也需要速度和方向控制也已经达到平稳。 车模的平衡是重中之重,由于车模同时受到三种控制的影响,从车模平衡
控制的角度来看,其它两个控制就成为它的干扰。因此对车模速度、方向的控制应该尽量保持平滑,以减少对于平衡控制的干扰。以速度调节为例,需要通 过改变车模平衡控制中车模倾角设定值,从而改变车模实际倾斜角度。为了避 免影响车模平衡控制,这个车模倾角的改变需要非常缓慢的进行。
2.2 平衡控制
车模的平衡控制的实现是通过负反馈的方法,通过抵消轮子在一个维度上 的倾斜的趋势便可保持平衡。

图 2.2 通过车轮运动保持平衡 通过陀螺仪和加速度计构成的互补滤波,便可得到车身角度。在角度反馈
控制中,与角度成比例的控制量是称为比例控制;与角速度成比例的控制量称 为微分控制(角速度是角度的微分)。其中比例控制相当于回正力,微分控制相 当于阻尼力。对系数进行调整后,即可保持车模平衡。
第二章 设计原理
(1)加速度计
加速度计可返回三个轴方向上的加速度,只需要测量其中一个方向上的加 速度值,就可以计算出车模倾角。车模直立时,固定加速度器在 Z 轴水平方向, 此时输出信号为零偏电压信号。当车模发生倾斜时,重力加速度 g 便会在 Z 轴方 向形成加速度分量,从而引起该轴输出电压变化。然而车模运动会引起信号发 生波动,所以还需要配合陀螺仪。
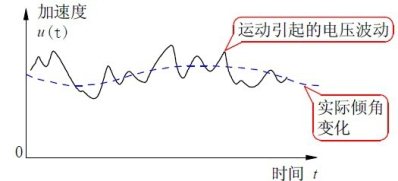
图 2.3 车模运动引起波动
(2)陀螺仪 陀螺仪可以用来测量物体的旋转角速度。它利用了旋转坐标系中的物体会
受到科里奥利力的原理,在车模上安装陀螺仪,可以测量车模倾斜角速度,将 角速度信号进行积分便可以得到车模的倾角。
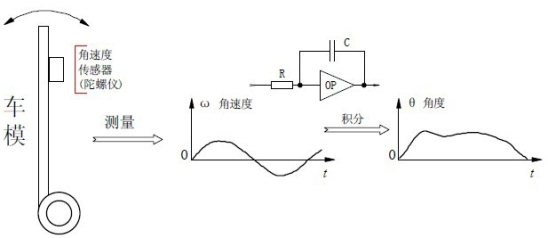
图 2.4 陀螺仪得到角度
由于陀螺仪输出的是车模的角速度,不受车体运动的影响,因此该信号中 噪声很小。车模的角度又是通过对角速度积分而得,这可进一步平滑信号,从 而使得角度信号更加稳定。但是从陀螺仪角速度获得角度信息需经积分运算, 如果角速度信号存在微小的偏差和漂移,经过积分运算之后,将变化形成积累 误差,并随时间延长逐步增加,无法形成正确的角度信号。
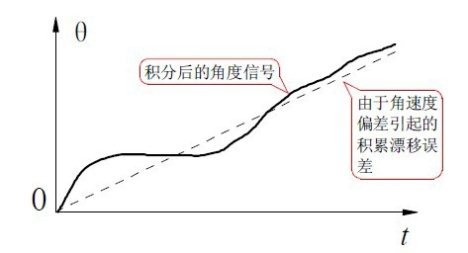
图 2.5 积分漂移
为了得到准确、噪声小的角度值,可用加速度传感器获得的角度信息对陀 螺仪结果进行校正,通过对比积分所得到的角度与重力加速度所得到的角度, 使用它们之间的偏差改变陀螺仪的输出,从而积分的角度逐步跟踪到加速度传 感器所得到的角度,这样就综合了两种传感器的优点,避免了缺点。
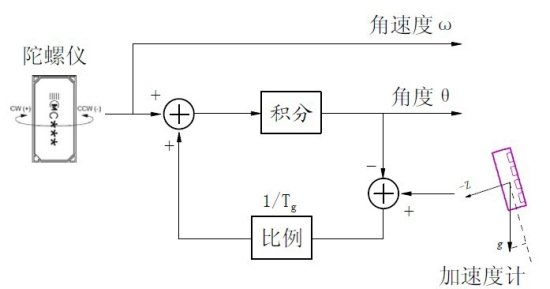
图 2.6 通过加速度计矫正陀螺仪的角度漂移 利用加速度计所获得的角度信息θg 与陀螺仪积分后的角度θ进行比较,将比较的误差信号经过比例 1/Tg 放大之后,与陀螺仪输出的角速度信号叠加再进行积分。对于加速度计给定的角度θg,经过比例、积分环节之后产生的角度θ必然最终等于θg。 为了避免输出角度θ跟踪时间过长,可以采取以下四种措施:
(1)仔细调整陀螺仪的放大电路,使得它的零点偏置尽量接近于设定值,并且稳定。
(2)在控制电路和程序运行的开始,尽量保持车模处于直立状态,这样一 开始就使得输出角度θ与θg 相等。此后,加速度计的输出只是消除积分的偏移, 输出角度不会出现很大的偏差。
(3)在程序运行开始测量温漂并去掉其影响。
(4)开机时用程序使二者快速跟随。
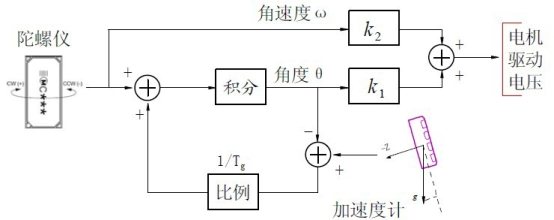
图 2.7 角度整体控制
2.3 速度控制
对于直立车模速度的控制相对于普通车模的速度控制则比较复杂。由于在 速度控制过程中需要始终保持车模的平衡,因此车模速度控制不能够直接通过 改变电机转速来实现。
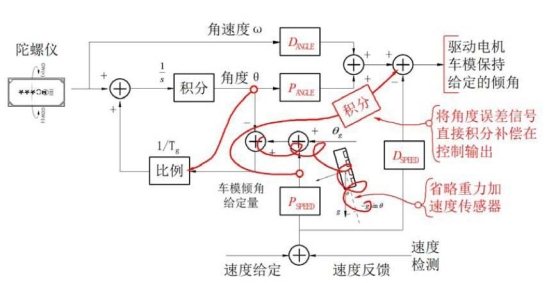
图 2.8 角度控制 改进后的角度和速度控制方案如下图所示: 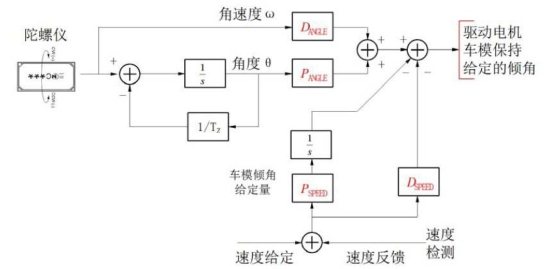 实现车模方向控制是保证车模沿着竞赛道路比赛的关键。通过道路电磁中心线偏差检测与电机差动控制实现方向控制,从而进一步保证车模在赛道上。 实现车模方向控制是保证车模沿着竞赛道路比赛的关键。通过道路电磁中心线偏差检测与电机差动控制实现方向控制,从而进一步保证车模在赛道上。
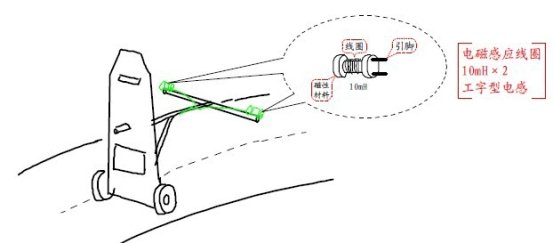
图 2.9 电感检测 利用电磁线偏差检测信号分别与车模速度控制信号进行加和减,形成左右
轮差动控制电压,使得车模左右轮运行角速度不一致进而控制车模方向。
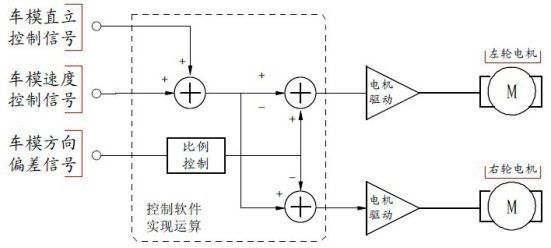
图 2.10 电机驱动差动电压来控制方向
第三章 电路设计
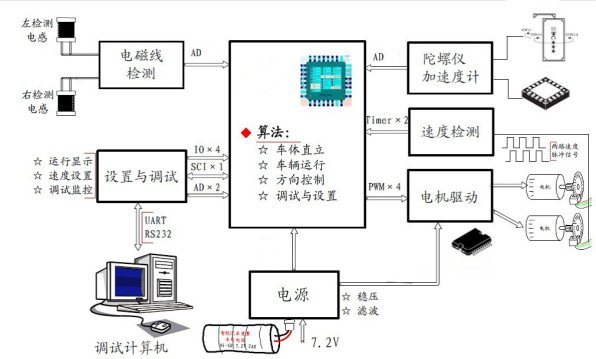
图 3.1 电路整体框图
3.1 电源模块设计
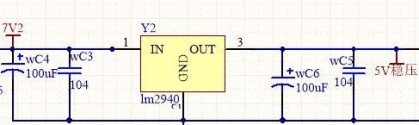
常用的电源有串联型线性稳压电源(LM2940、7805 等)和开关型稳压电源(LM2596、LM2575 等)两大类。前者具有波纹小、电路结构简单的优点,但是 效率较低,功耗大。我们比较使用了几种电源稳压,最后选用 LM2940 稳压芯片。 电路图如下:
图 3.2 LM2940 稳压电路
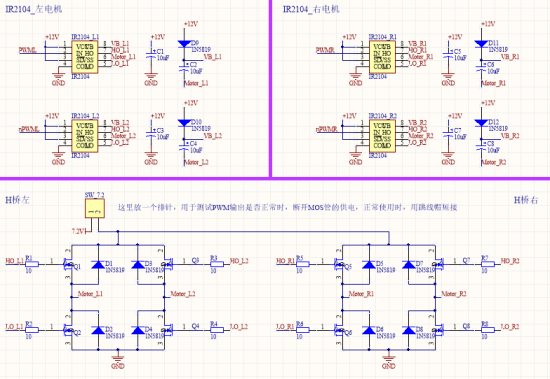
3.2 电机驱动
MOS 管最显著的特性是开关特性好,所以被广泛应用在需要电子开关的电 路中,常见的如开关电源和马达驱动,也有照明调光。
3.3 传感器模块
3.3.1 加速度计
使用型号为 MMA8451,实物图如下:
图 3.4 加速度计
3.3.2 陀螺仪
使用型号为 LS3G4200D,实物图如下:
图 3.5 陀螺仪
3.3.3 电感运放
图 3.6 电感运放
3.3.4 速度传感器模块
电机速度传感器使用了固定在电机输出轴上的编码器,如下:
图 3.7 编码器 第四章 机械设计
4.1 电池的安装
为了保证车模直立角度比较合理,我们的电池安装位置保持其重心较低且 集中。
4.2 电感的安装
本方案中共使用 5 个电感,中间两个一字电感,两侧电感微八字,使入弯 更顺畅。
4.3 干簧管的安装
为了检测赛道上的永磁铁,干簧管位置要比较低,我们设置在了车子下面。
4.5 陀螺仪与加速度计的安装
陀螺仪和加速度计应固定在整个车模中间质心的位置,这样可以最大程度 减少车模运行时前后振动对于测量倾角的干扰。如果陀螺仪安装不能够保证水 平,则会影响车模过弯道时的速度。表现为车模在过弯道时速度变快或者变慢。
4.6 电路板的固定及安装
我们在车上安装了支架,将电路板用螺丝固定在支架上。

第五章 软件设计
5.1 整体框架
本系统在 E 车车模基础上,搭建硬件电路,使用 K60 单片机的运算能力, 根据传感器采集到的信息进行控制。在功能上,本系统主要分为四个模块:
1.角度控制模块:使用加速度计和陀螺仪融合出车身角度,通过 PD控制算法维持车身平衡。
2.速度控制模块:利用编码器测量两个车轮的速度,使用 PI 控制算法控 制车子行进速度。
3.方向控制模块:使用测得磁场分布,并根据车身状况作出循迹决策。
4.调试模块:使用液晶、键盘、蓝牙模块,能够更加直观地观察车子运行 情况,使得参数调试更加方便。
程序上电运行后,便进行单片机的初始化。初始化的工作包括有两部分, 一部分是对于单片机各个应用到的模块进行初始化。第二部分是应用程序初始 化,是对于车模控制程序中应用到的参数进行初始化。
初始化完成后,就进入主循环,不断进行按键检测和菜单控制,并且根据 设置发送无线。车模的直立控制、速度控制以及方向控制都是在中断程序中完 成。通过全局标志变量确定是否进行这些闭环控制。
使用定时器,产生 2ms 的周期中断。每次中断都进行角度控制与速度控制,方向控制则 20ms 执行一次。
5.2 控制算法
第六章 各项参数
车模基本尺寸
车长:600mm 车宽:220mm 车高:400mm
电路功耗及电容总容量 电路功耗:约 0.7W 电容总容量:500uF
传感器及伺服电机数量 加速度传感器:1 个 陀螺仪传感器:1 个
电感(传感器):1 个 测速传感器:1 个 总计传感器:4 个 无额外的伺服电机
赛道信息检测精度、频率 赛道检测精度:2cm 赛道检测周期:2ms
第七章 结论
与其他组别相比,电磁组的抗干扰强高,对赛道的要求低,能够很好的适 应赛场环境。在地面上布一根导线,就可以作为小车的跑道,简单易行。
但是,使用电磁检测的方式不易于提高前瞻量,同时,直立车必须得先保 证车模直立的情况下才考虑车模速度,所以小车速度有所限制,这使得在保证 小车行驶平稳的前提下,提升速度有一定的困难。
通过一年的准备,我们对智能车的设计、制作与调试有了更深的了解,小 车运行良好。这一年来的备赛过程,大大提高了我们的自学能力、团队意识, 将课堂知识引入实践,使我们收获颇丰,回首刚入队时迷茫的自己,我们都有 了许多成长,也有了将经验和知识传递下去的责任感与能力。
十分感谢这一年老师、学长以及队友们的帮助,让我们一步步走到今天。 希望智能车比赛能一直持续下去,带给更多人收获与兴趣。
参考文献
1. 竞赛秘书处: 第七届全国大学生“飞思卡尔”杯智能汽车竞赛电磁组直 立行车参考设计方案(版本 2.0). 2012.
2. 竞赛秘书处: 第七届全国大学生“飞思卡尔”杯智能汽车竞赛电磁组直 立行车参考设计方案(版本 1.0). 2012.
3. 卓晴 李马: 基于磁场检测的寻线小车传感器布局研究. 2009.
4. 智能车竞赛秘书处: 电磁组直立车模参数整定与调试指南. 2012.
角度通过加速度计与陀螺仪的互补滤波得出: g_fGravityAngle = Gray_Z_Offset - angle_C; g_fGyroscopeAngleSpeed = (Gyro_X - Gyro_X_Offset) * Gyro_Raiot;
// 获取角速度,并归一化
g_fCarAngle = g_fGyroscopeAngle; // 车身角度为陀螺仪积分后角度
integralDriftError = (g_fGravityAngle - g_fCarAngle)/GRAVITY_ADJUST_TIME_CONYANT;
// 获取误差,用于矫正陀螺仪的角速度
g_fGyroscopeAngle += (g_fGyroscopeAngleSpeed + integralDriftError ) * 0.005;
// 融合后积分得到真正要用的角度 对当前角度和设定角之间的比例项和微分项分别乘以相应系数并相加,即
为输出量。
fValue = (CAR_ANGLE_SET-g_fCarAngle)*Car_angle_P + Car_angle_D*(CAR_ANGLE_SPEED_SET-g_fGyroscopeAngleSpeed);
g_fAngleControlOut = fValue;
5.2.2 方向控制
方向控制同样由比例项与微分项组成:
DirectionControlP = deviation * Car_Direction_P ; DirectionControlD = changeRate * Car_Direction_D ;
g_fDirectionControlNew = DirectionControlD + DirectionControlP;
5.2.3 速度控制
本设计方案中速度采用 PI 控制,通过积分项使控制稳定。
speedoutI = SpeedControlIntegral*useSpeedI;
if(speedoutI >= integralGiven)
speedoutI = integralGiven;
speedoutP = fErrorP * useSpeedP;
g_fspeedControlOutNew = speedoutP + speedoutI;
完整的pdf格式文档51黑下载地址:
 厦门大学.pdf
(1.83 MB, 下载次数: 32)
厦门大学.pdf
(1.83 MB, 下载次数: 32)
|












 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

