角度。
校准平衡位置角度操作步骤:
1) 通过按“启/停”按键使能电机停止工作。此时右下显示OFF状态;
2) 将摆杆垂直向上置于平衡位置;
3) 通过按“五向按键”上下键,切换到OLED菜单第2页,选择LockAngle选项;
4) 按下“五向按键”中间键确认。
5) 将摆杆放下,即可进行其他操作。
校准平衡位置角度后,您可以进行下面的操作。 正常操作步骤:
上电后,OLED显示第1面菜单,为各PID参数值,注意右下的OFF状态,表示目前电机 驱动模块TB6612处于禁止工作状态,需要按下列步骤操作:
2) 上电后电机处于禁止状态,通过按“启/停”按键(见图3.3)使能电机驱动使 能。此时右下显示ON状态;
3) 通过按“五向按键”上下键,切换到OLED菜单第2页,选择相应功能; 目前的菜单操作功能有两项:
start:起摆 cycle:(原来标识为roll360):转圈 此外,起摆直立后,一直有抗扰动功能。
4) 按下“五向按键”中间键确认。即可执行相应功能。
5) 任何时候想停止电机工作,可按下“启/停”按键 说明:本系统的起摆的思路是让减速电机正向运动一定时间,形成一定摆角后,再反向 运动一定时间,一个来回便可竖立,进入平衡调节。
void function(void)//倒立摆中扩展功能1(起摆),功能2(摆臂旋转1圈)实现函数
{…
switch(func)
{
case(1):{
…
setmoto(-op1);delay_ms(t1);
setmoto(op2);delay_ms(t2);
…
}
}
}












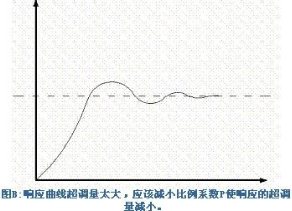
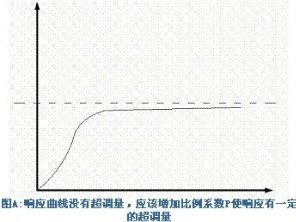
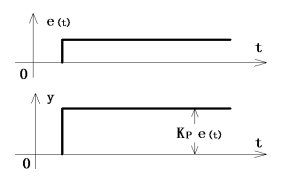 1000,那么输出到电机两端的电压应变为 U0+0.2*(800-1000)。从而达到了调节速度 的目的。显然比例 P 越大时,电机转速回归到输入值的速度将更快,及调节灵敏度就越 高。从而,加大 P 值,可以减少从非稳态到稳态的时间。但是同时也可能造成电机转速 在预设值附近振荡的情形,所以又引入积分 I 解决此问题。
1000,那么输出到电机两端的电压应变为 U0+0.2*(800-1000)。从而达到了调节速度 的目的。显然比例 P 越大时,电机转速回归到输入值的速度将更快,及调节灵敏度就越 高。从而,加大 P 值,可以减少从非稳态到稳态的时间。但是同时也可能造成电机转速 在预设值附近振荡的情形,所以又引入积分 I 解决此问题。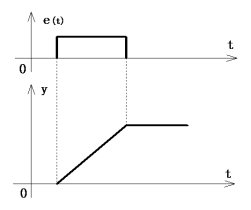
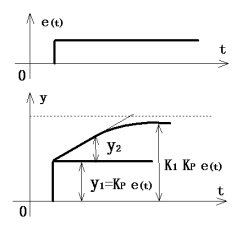
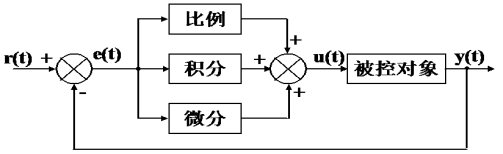
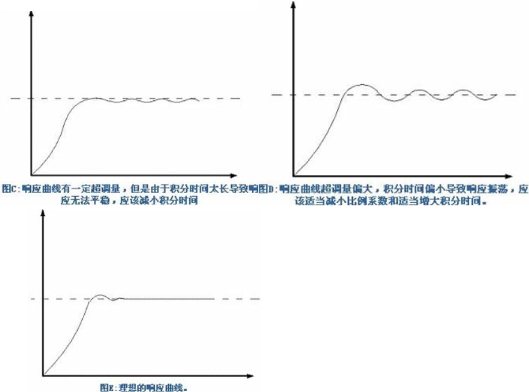
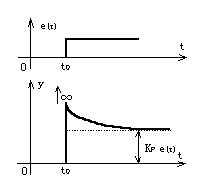 系统偏差信号的变化率 e(t)-e(t-1),具有预见性,能预见偏差变化的趋势,产生超 前的控制作用,在偏差还没有形成之前,已被微分调节作用消除,因此可以改善系统的 动态性能。但是微分对噪声干扰有放大作用,加强微分对系统抗干扰不利。 积分和微 分都不能单独起作用,必须与比例控制配合。
系统偏差信号的变化率 e(t)-e(t-1),具有预见性,能预见偏差变化的趋势,产生超 前的控制作用,在偏差还没有形成之前,已被微分调节作用消除,因此可以改善系统的 动态性能。但是微分对噪声干扰有放大作用,加强微分对系统抗干扰不利。 积分和微 分都不能单独起作用,必须与比例控制配合。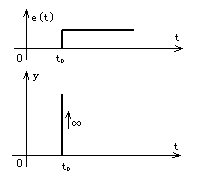
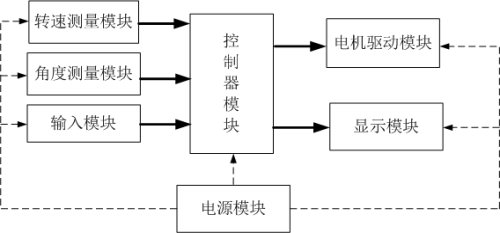
 2. 本系统 PID 控制原理
2. 本系统 PID 控制原理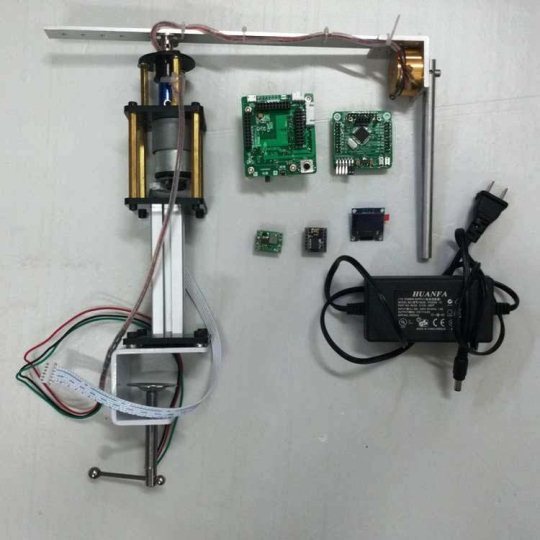 本系统的全套装置如图3.1所示:
本系统的全套装置如图3.1所示:



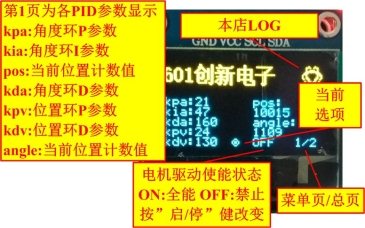 图 3.4 OLED 第 1 页菜单内容说明
图 3.4 OLED 第 1 页菜单内容说明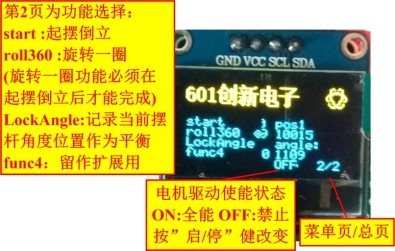

 如图3.6所示,通过五向按键修改PID参数后,长按中间键2秒以上,第一行会出现锁 定图标
如图3.6所示,通过五向按键修改PID参数后,长按中间键2秒以上,第一行会出现锁 定图标
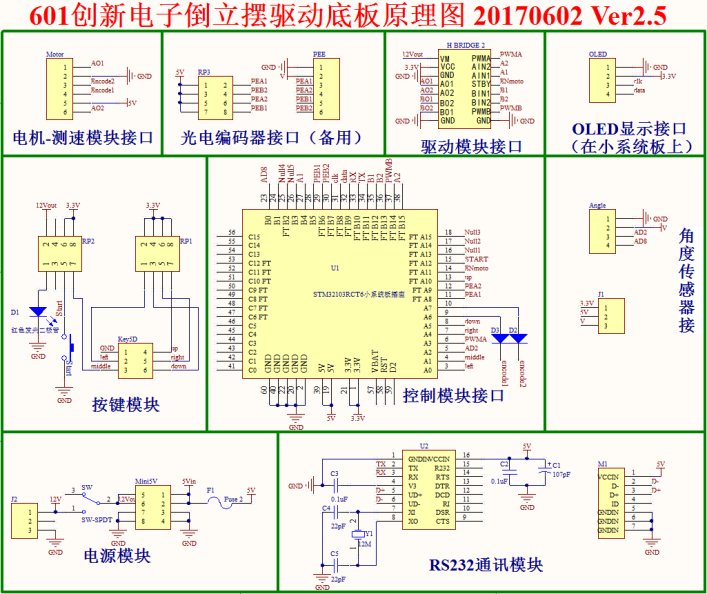
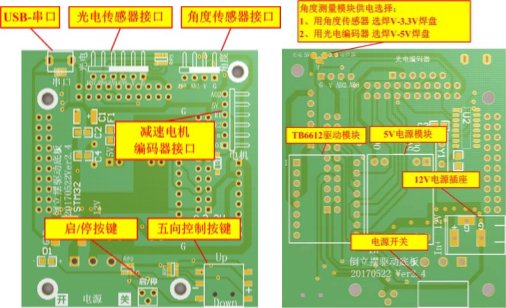 3-3 所示。PCB 板见图 3-4.
3-3 所示。PCB 板见图 3-4.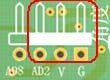 用导电塑料角位移传感器的一阶倒立摆,只需要接右边三脚,最左边 的一个脚接了 STM32 的 AD8,在扩展为二阶倒立摆时使用
用导电塑料角位移传感器的一阶倒立摆,只需要接右边三脚,最左边 的一个脚接了 STM32 的 AD8,在扩展为二阶倒立摆时使用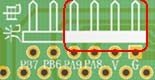 用光电编码器做角度传感器的一阶倒立摆,只需要接右边四个 脚,最左边的两个脚接了 STM32 的 PB6、PB7,在扩展为二阶倒立摆时使用
用光电编码器做角度传感器的一阶倒立摆,只需要接右边四个 脚,最左边的两个脚接了 STM32 的 PB6、PB7,在扩展为二阶倒立摆时使用
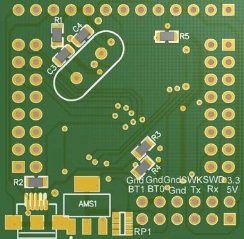
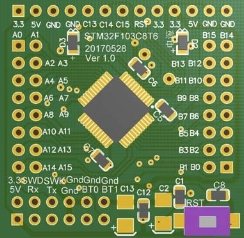


 图 3.9 WDD35D4 角度传感器是实物图与原理图
图 3.9 WDD35D4 角度传感器是实物图与原理图
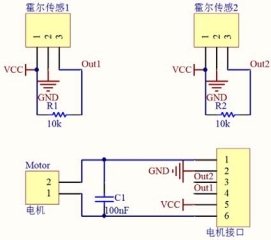 采用了霍尔传感器来测量磁环转动时带来的磁场变化,霍尔传感器前转过 1 对磁 极产生一个脉冲。当带动磁环转动的减速电机后轴转动一圈,一个霍尔传感器上可以产 生 13 个脉冲。而选用的直流减速电机的减速比为 1:30,所以电机前轴转动一圈,一个 霍尔传感器上可以产生 13*30=390 个脉冲。图 3‐9 所示的是增量式输出的霍尔编码器 模块,原理图如图 3‐10 所示。
采用了霍尔传感器来测量磁环转动时带来的磁场变化,霍尔传感器前转过 1 对磁 极产生一个脉冲。当带动磁环转动的减速电机后轴转动一圈,一个霍尔传感器上可以产 生 13 个脉冲。而选用的直流减速电机的减速比为 1:30,所以电机前轴转动一圈,一个 霍尔传感器上可以产生 13*30=390 个脉冲。图 3‐9 所示的是增量式输出的霍尔编码器 模块,原理图如图 3‐10 所示。
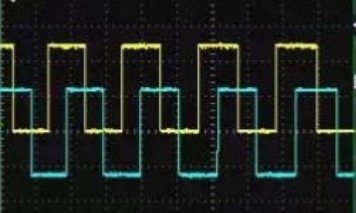
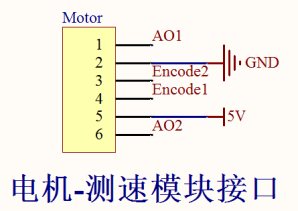

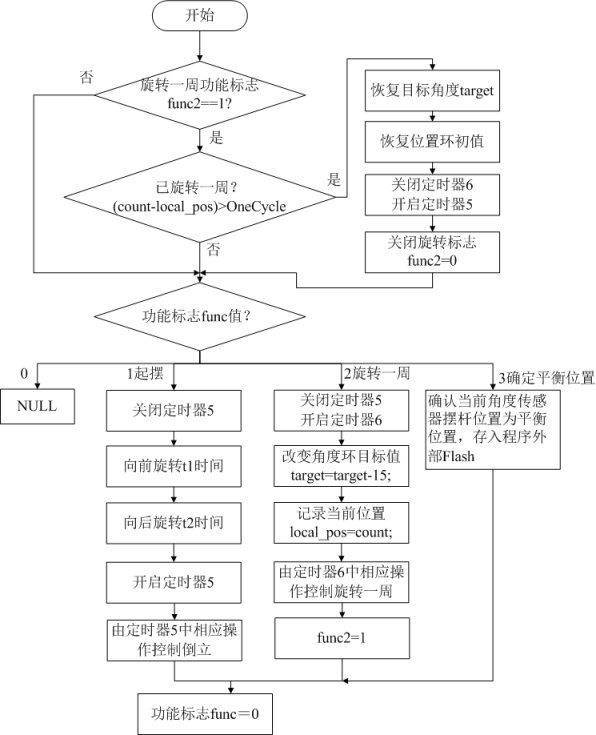
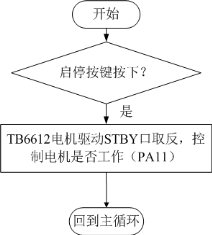
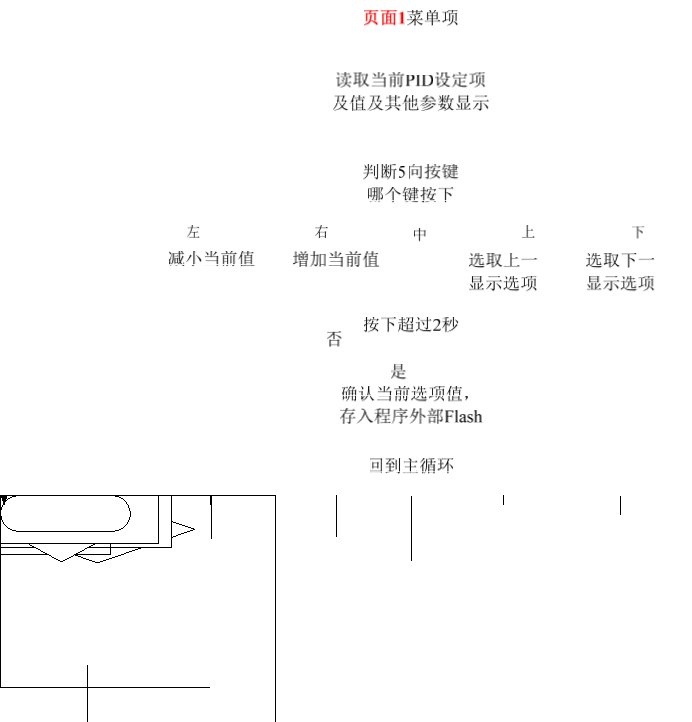 图 4‐4 OLED 页面 1 菜单中五向按键按下外部中断流程图
图 4‐4 OLED 页面 1 菜单中五向按键按下外部中断流程图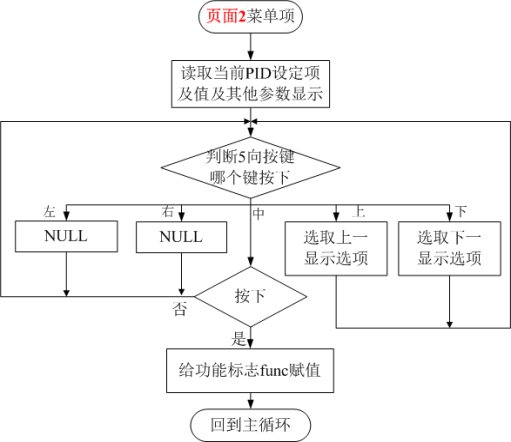

 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

