|
|
|
DS18B20 14.1概念 . 这一章 是关于 DS18B20 实时温 度传感器。 相信有学过 c51 单片机 的朋友都对 他不陌生 吧。我恰恰也学习过,不过当初并没有掌握好。学习板搭配的 DS18B20,一般上给人的 感觉有点 像三极管,其实 DS18B20 的内部结 构与原理也挺猥 琐的,但是我们使 用也是 为了实现温度传感的功能而已,基本上不会介绍过度深入。
14.2DS18B20介绍
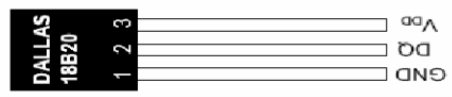
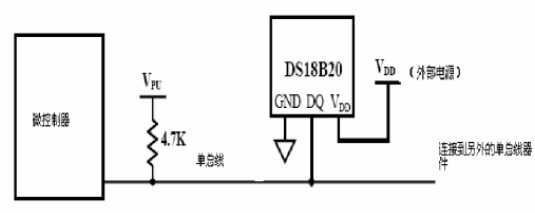
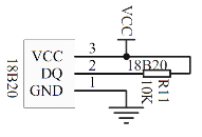
 DS18B20 有三只引脚,VCC,DQ ,和 VDD。
而 HJ-2G 板子上,采用了外部供电的链接方式,而总线必须链接上拉电阻。这一目的告 诉我们,一线总线在空置状态时,都是一直处于高电平。
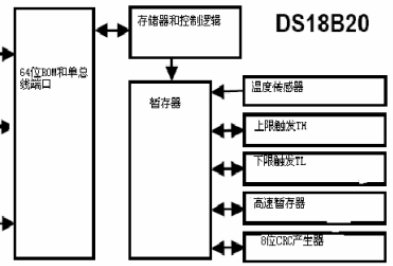
DS18B20 的 内 部 有 64 位 的ROM 单元,和 9 字节的暂存器单 元 。 64 位 ROM 包 含 了 ,DS18B20 唯一的序列号(唯一的名字)。
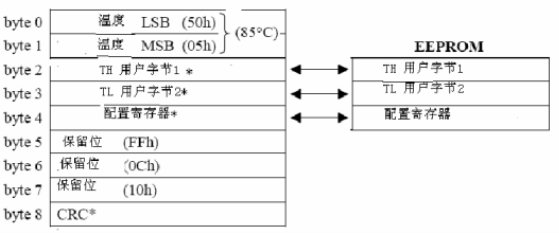
以上是内部 9 个字节的暂存单元(包括 EEPROM)。 字节 0~1 是转换好的温度。 字节 2~3 是用户用来设置最高报警和最低报警值。这个可以用软件来实现。 字节 4 是用来配置转换精度,9~12 位。 字节 5~8 就不用看了。
14.3字节 0~1:转换好的温度
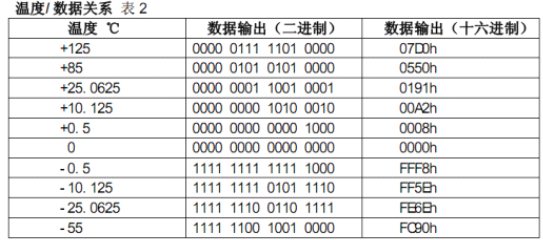
DS18B20 的温度操作是使用 16 位,也就是说分辨率是 0.0625。BIT15~BIT11 是符号位, 为了就是表示转换的值是正数还是负数。看看数据手册给出的例子吧。
要求出正数的十进制值,必须将读取到的 LSB 字节,MSB 字节进行整合处理,然后乘 以 0.0625 即可。
Eg:假设从,字节 0 读取到 0xD0 赋值于 Temp1,而字节 1 读取到 0x07 赋值于 Temp2, 然后求出十进制值。
unsigned int Temp1,Temp2,Temperature;
Temp1=0xD0; // 低八位 Temp2=0x07; // 高八位
Temperature = ((Temp2<<8 ) | Temp1 ) * 0.0625; // 又或者 Temperature = (Temp1 + Temp2 *256) * 0.0625; //Temperature=125
在这里我们遇见了一个问题,就是如何求出负数的值呢?很遗憾的,单片机不像人脑那 样会心算,我们必须判断 BIT11~15 是否是 1,然后人为置一负数标志。
Eg. 假设从,字节 0 读取到 0x90 赋值于 Temp1,而字节 1 读取到 0xFC 赋值于 Temp2, 然后求出该值是不是负数,和转换成十进制值。
- unsigned int Temp1,Temp2,Temperature;
- unsigned char Minus_Flag=0;
- Temp1=0x90; // 低八位
- Temp2=0xFC; // 高八位
- //Temperature = (Temp1 + Temp2 *256) * 0.0625; //Temperature=64656
- // 很明显不是我们想要的答案
- if(Temp2&0xFC) // 判断符号位是否为 1
- {
- Minus_Flag=1; // 负数标志置一
- Temperature = ((Temp2<<8 ) | Temp1 ) // 高八位第八位进行整合
- Temperature= ((~Temperature)+1); // 求反,补一
- Temperature*= 0.0625; // 求出十进制
- } //Temperature=55;
- else
- {
- Minus_Flag=0;
- Temperature = ((Temp2<<8 ) | Temp1 ) * 0.0625;
- }
那个人为的负数标志,是真的很有用处的。这个要看你你自己的想象力了,如何去利用它。
继续继续,以上我们是求出没有小数点的正数。如果我要求出小数点的值的话,那么我 应该这样做。
Eg:假设从,字节 0 读取到 0xA2 赋值于 Temp1,而字节 1 读取到 0x00 赋值于 Temp2, 然后求出十进制值,要求连同小数点也求出。 - unsigned int Temp1,Temp2,Temperature;
- Temp1=0x90; // 低八位
- Temp2=0xFC; // 高八位
- // 实际值为 10.125
- //Temperature = ((Temp2<<8 ) | Temp1 ) * 0.0625; //10,无小数点
- Temperature = ((Temp2<<8 ) | Temp1 ) * (0.0625 * 10) ; //101 ,一位小数点
- //Temperature = ((Temp2<<8 ) | Temp1 ) * (0.0625 * 100) ; //1012,二位小数点
如以上的例题,我们可以 先将 0.0625 乘以 10,然后再乘以整合后的 Temperature 变量 , 就可以求出后面 一个小数点的值(求出更多的小数 点,方法都是以此类推 )。得出的结 果是 101,然后再利用简单的算法,求出每一位的值。
unsinged char Ten,One,Dot1
Ten=Temperature/100; //1 One=Temperature%100/10; //0 Dot1=%10; //1
求出负数的思路也一样,只不过多出人为置一负数标志,求反补一的动作而已。自己发 挥想象力吧。
14.4字节 2~3:TH和 TL配置 TH 与 TL 就是所 谓的温度最 高界限,和 温度最低界 限的配置。 其实这些可 以使用软件 来试验,所以就无视了。
14.5字节 4:配置寄存器
BIT7 出厂的时候就已经设置为 0,用户不建议去更改。而 R1 与 R0 位组合了四个不同 的转换精度, 00 为 9 位转换精度而转换时间是 93.75ms,01 为 10 位转换精度而转换 时 间是 187.5ms,10 为 11 位转换精度而转换时间是 375ms,11 为 12 位转换精度而转换时 间是 750ms(默认)。该寄存器还是留默认的好,毕竟转换精度表示了转换的质量。
14.6字节 5~7,8:保留位,CRC 无视,无视吧。
14.7单片机访问 DS18B20 DS18B20 一 般 都是 充 当 从 机的 角 色 , 而单 片 机 就 是主 机 。 单 片机 通 过 一 线总 线 访 问 DS18B20 的话,需要经过以下几个步骤:
1.DS18B20 复位。 2.执行 ROM 指令。 3.执行 DS18B20 功能指令(RAM 指令)。
补充一下 。一般上我们都 是使用单点,也就 是说单线总线上 仅有一个 DS18B20 存在而 已。所以 我们无需刻意读 取 ROM里边的序 列号来,然后匹 配 那个 DS18B20?而是更 直接的,跳过 ROM 指令,然后直接执行 DS18B20 功能指令。
DS18B20 复位,在某种意义上就是一次访问 DS18B20 的开始,或者可说成是开始信号。
ROM 指令,也就是访问,搜索,匹配,DS18B20 个别的 64 位序列号的动作。在单点情 况下,可以直接跳过 ROM 指令。而跳过 ROM 指令的字节是 0xCC。
DS18B20 功能指令有很多种,我就不一一的介绍了 ,数据手册里有更详细的介绍。这里 仅列出比较常用的几个 DS18B20功能指令。
0x44:开始转换温度。转换好的温度会储存到暂存器字节 0 和 1。 0xEE :读暂存指令。读暂存指令,会从暂存器 0 到 9,一个一个字节读取,如果要停止 的话,必须写下 DS18B20 复位。
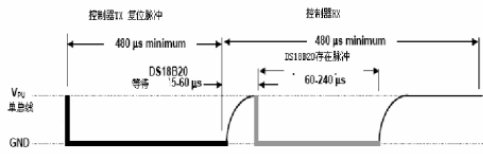
14.8DS18B20复位
DS18B20 的复位时序如下: 1.单片机拉低总线 480us~950us, 然后释放总线(拉高电平)。 2.这时 DS18B20 会拉低信号,大约 60~240us 表示应答。 3.DS18B20 拉低电平的 60~240us 之间,单片机读取总线的电平,如果是低电平,那么表示复位成功。 4.DS18B20 拉低电平 60~240us 之后,会释放总线。
C 语言代码:
//DS1302 复位 函数 void DS1302_Res et()
{ DDRA|=BIT(DQ); //DQ 为输 出状态 PORTA&=~BIT(DQ); //输出 低电平Delay_1us (500); //延迟 500 微妙 PORTA|=BIT(DQ); //示范 总线 Delay_1us(60); //延迟 60 微妙 DDRA&=~BIT(DQ); //DQ 位输 出状态 while(PINA&BIT (DQ)); //等待 从机 DS18B20 应答 (低电 平有效 ) while(!(PINA&BIT(DQ))); //等待 从机 DS18B20 释放 总线 }
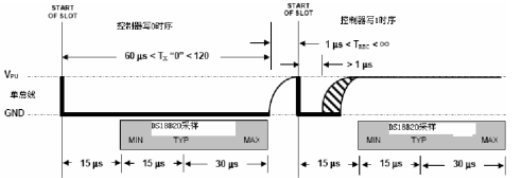
14.9DS18B20读写逻辑 0与 1
 DS18B20 写逻 辑 0 的步 骤如下 : 1.单片 机拉低 电平大 约 10~15us ,。 2.单片 机持续 拉低电 平大约 20~45us 的时 间。 3.释放 总线 DS18B20 写逻 辑 1 的步 骤如下 : 1.单片 机拉低 电平大 约 10~15us ,。 2.单片 机拉高 电平大 约 20~45us 的时 间。 3.释放 总线
DS18B20 读逻 辑 0 的步 骤如下 : 1.在读 取的时 候单片 机拉低 电平大 约 1us 2.单片 机释放 总线, 然后读 取总线 电平。 3.这时 候 DS18B20 会拉 低电平 。 4.读取 电平过 后,延 迟大约 40~45 微妙 DS18B20 读逻 辑 1 的步 骤如下 : 1.在读 取的时 候单片 机拉低 电平大 约 1us 2.单片 机释放 总线, 然后读 取总线 电平。 3.这时 候 DS18B20 会拉 高电平 。 4.读取 电平过 后,延 迟大约 40~ 45 微妙
如果要读或者写 一个字节,就要重复以上的步骤八 次。如以下的 C 代码,使用 for 循环,和数据变 量的左移和或运算,实现一个字节读与写。
- //DS18B20 写字 节函数
- void DS1302_Write(uns igned char Data)
- {
- unsigned char i;
- DDRA|=BIT(DQ); //DQ 为输 出
- for(i=0;i<8;i++)
- {
- PORTA&=~BIT(DQ); //拉低 总线
- Delay_1us (10); //延迟 10 微妙 (最大 15 微妙 )
- if(Data&0x01) PORTA|=BIT(DQ);
- els e PORTA&=~BIT(DQ);
- Delay_1us (40); //延迟 40 微妙 (最大 45 微妙 )
- PORTA|=BIT(DQ); //释放 总线
- Delay_1us (1); //稍微 延迟
- Data>>=1;
- }
- }
- //DS18B20 读字 节函数
- unsigned char DS1302_Read()
- {
- unsigned char i,Temp;
- for(i=0;i<8;i++)
- {
- Temp>>=1; //数据 右移
- DDRA|=BIT(DQ); //DQ 为输 出状态
- PORTA&=~BIT(DQ); //拉低 总线, 启动输 入 PORTA|=BIT(DQ); //释放 总线 DDRA&=~BIT(DQ); //DQ 为输 入状态
- if(PINA&BIT(DQ)) Temp|=0x80;
- Delay_1us (45); //延迟 45 微妙 (最大 45 微妙 )
- }
- return Temp;
- }
就是这么建档而已 ,不过这里有一个注意点,就是 Delay_1us(); 函数延迟的时间, 必须模拟非常准 确,因为单线总线对时序的要求敏感点。
14.10简单归纳 实验开始之前,简单的归纳一些重点。单线总线高电平为闲置状态。单片机访问 DS18B20 必须遵守, DS18B20 复位-->执行 ROM 指令-->执行 DS18B20 功能指令。而在单点上, 可以直接跳过 ROM 指令。DS18B20 的转换精度默认为 12 位,而分辨率是 0.0625。
DS18B20 温度读取函数参考步骤:
DS18B20 开始转换: 1.DS18B20 复位。 2.写入跳过 ROM 的字节命令,0xCC。 3.写入开始转换的功能命令,0x44。 4.延迟大约 750~900 毫秒
DS18B20 读暂存数据: 1.DS18B20 复位。 2.写入跳过 ROM 的字节命令,0xCC。 3.写入读暂存的功能命令,0xee。 4.读入第 0 个字节 LS Byte,转换结果的低八位。 5.读入第 1 个字节 MS Byte,转换结果的高八位。 6.DS18B20 复位,表示读取暂存结束。
数据求出十进制: 1.整合 LS Byte 和 MS Byte 的数据 2.判断是否为正负数(可选) 3.求得十进制值。正数乘以 0.0625,一位小数点乘以 0.625,二位小数点乘以 6.25。 4.十进制的“个位”求出。
14.11实验:利用 DS18B20实现单点温度测量,结果输出在数码管。
 DS18B20 接口 ATMega 16 对应引脚
实验的要求是以 DS18B20 默认的配置,亦即 12 位的转换精度。然而输出的结果为两个 小数点 xx.xx。HJ-2G 板子上设计得DS18B20 的接口和典型,没有什么特别需要注意的。 而 DS18B20 DQ 引脚对应的链接是 PA5。
源码:
- ===================================================================
- //1400-DS18B20.c
- //简单 的驱动 程式
- //akuei2 08-01-10
- #include "iom16v.h"
- #include "macros .h"
- #include "LED7.h"
- #define DQ PA5
- //微妙 级延迟 函数
- void Delay_1us (unsigned int x)
- {
- unsigned int i;
- x=x*5/4;
- for( i=0;i<x;i++);
- }
- //DS1302 复位 函数
- void DS1302_Res et()
- {
- DDRA|=BIT(DQ); //DQ 为输 出状态 PORTA&=~BIT(DQ); //输出 低电平 Delay_1us(500); //延迟 500 微妙 PORTA|=BIT(DQ); //示范 总线 Delay_1us (60); //延迟60 微妙 DDRA&=~BIT(DQ); //DQ 位输 出状态
- while(PINA&BIT (DQ)); //等待 从机 DS18B20 应答 (低电 平有效 )
- while(!(PINA&BIT(DQ))); //等待 从机 DS18B20 释放 总线
- }
- //DS1302 写字 节函数
- void DS1302_Write(uns igned char Data)
- {
- unsigned char i;
- DDRA|=BIT(DQ); //DQ 为输 出
- for(i=0;i<8;i++)
- {
- PORTA&=~BIT(DQ); //拉低 总线
- Delay_1us (10); //延迟 10 微妙 (最大 15 微妙 )
- if(Data&0x01) PORTA|=BIT(DQ);
- els e PORTA&=~BIT(DQ);
- Delay_1us (40); //延迟 40 微妙 (最大 45 微妙 )
- PORTA|=BIT(DQ); //释放 总线
- Delay_1us (1); //稍微 延迟
- Data>>=1;
- }
- }
- //DS1302 读字 节函数
- unsigned char DS1302_Read()
- {
- unsigned char i,Temp;
- for(i=0;i<8;i++)
- {
- Temp>>=1; //数据 右移
- DDRA|=BIT(DQ); //DQ 为输 出状态
- PORTA&=~BIT(DQ); //拉低 总线, 启动输 入 PORTA|=BIT(DQ); //释放 总线 DDRA&=~BIT(DQ); //DQ为输 入状态
- if(PINA&BIT(DQ)) Temp|=0x80;
- Delay_1us (45); //延迟 45 微妙 (最大 45 微妙 )
- }
- return Temp;
- }
- //读温 度函数
- unsigned int Read_Temperature()
- {
- unsigned int Temp1,Temp2;
- DS1302_Res et(); //DS1302 复位
- DS1302_Write(0xCC); //跳过 ROM DS1302_Write(0x44); //温度 转换
- DS1302_Res et(); //DS1302 复位
- DS1302_Write(0xCC); //跳过 ROM DS1302_Write(0xbe); //读取 RAM
- Temp1=DS1302_Read(); //读低 八位, LS Byte, RAM0
- Temp2=DS1302_Read(); //读高 八位, MS Byte, RAM1
- DS1302_Res et(); //DS1302 复位 ,表示 读取结 束
- return (((Temp2<<8)|Temp1)*6.25); //0.0625=xx, 0.625=xx.x, 6.25=xx.xx
- }
- void main()
- {
- unsigned int Temp;
- LED7_Init(); //初始 化数码 管引脚
- while(1)
- {
- Temp=Read_Temperature(); //调用 读取温 度函数 Number_Show(Temp); //显示 温度Delay_1us (100); //稍微 延迟
- }
- }
- LED7.h 的头文件
- ===================================================================
- //LED7.H
- // 数码管显示
- // 数组声明并定义在存储数据区 code
- //0~9
- #pragma data:code
- unsigned char const
- Number[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x00,}; unsigned char const Number_Dot[]={0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef,0x00};
- // 延迟函数
- void Delay(unsigned long x)
- {
- while(x--);
- }
- // 数码管显示函数
- void Number_Show(unsigned int Num)
- {
- unsigned char Ten,One,Dot1,Dot2; Ten=Num/1000; // 取十位 One=Num%1000/100; // 取个位Dot1=Num%100/10; // 取点数位 Dot2=Num%10; // 取点数位
- // 显示十位
- PORTB=Number[Ten]; // 送模码 PORTA|=BIT(PA3); //PA3 高电平PORTA&=~BIT(PA3); //PA3 低电平
- PORTB=~BIT(0); //送位选
- PORTA|=BIT(PA4); //PA3 高电平
- PORTA&=~BIT(PA4); //PA3 低电平
- Delay(600); // 稍微延迟
- // 显示个位
- PORTB=Number_Dot[One]; // 送模码
- PORTA|=BIT(PA3); //PA3 高电平
- PORTA&=~BIT(PA3); //PA3 低电平
- PORTB=~BIT(1); //送位选
- PORTA|=BIT(PA4); //PA3 高电平
- PORTA&=~BIT(PA4); //PA3 低电平
- Delay(600); // 稍微延迟
- // 显示点数位 1
- PORTB=Number[Dot1]; //送模码
- PORTA|=BIT(PA3); //PA3 高电平
- PORTA&=~BIT(PA3); //PA3 低电平
- PORTB=~BIT(2); //送位选
- PORTA|=BIT(PA4); //PA3 高电平
- PORTA&=~BIT(PA4); //PA3 低电平
- Delay(600); // 稍微延迟
- // 显示点数位 2
- PORTB=Number[Dot2]; //送模码
- PORTA|=BIT(PA3); //PA3 高电平
- PORTA&=~BIT(PA3); //PA3 低电平
- PORTB=~BIT(3); //送位选
- PORTA|=BIT(PA4); //PA3 高电平
- PORTA&=~BIT(PA4); //PA3 低电平
- Delay(600); // 稍微延迟
- // 显示`
- PORTB=0x63; // 送模码
- PORTA|=BIT(PA3); //PA3 高电平
- PORTA&=~BIT(PA3); //PA3 低电平
- PORTB=~BIT(4); //送位选
- PORTA|=BIT(PA4); //PA3 高电平
-
- PORTA&=~BIT(PA4);Delay(600);
-
- //PA3 低电平
- // 稍微延迟
- // 显示 C
-
- PORTB=0x39;PORTA|=BIT(PA3);PORTA&=~BIT(PA3);
-
- // 送模码
- //PA3 高电平
- //PA3 低电平
- PORTB=~BIT(5);
-
- //送位选
- PORTA|=BIT(PA4);PORTA&=~BIT(PA4);Delay(1000);
-
- //PA3 高电平
- //PA3 低电平
- // 稍微延迟
- }
-
-
- //IO 初始化函数
- void LED7_Init()
- {
- DDRA|=BIT(PA3); //PA3 状态为输出
- DDRA|=BIT(PA4); //PA4 状态为输出
- DDRB|=0xff; //PB 状态为输出
- }
以上的程式只有一个注意点就是 :DS18B20 的转启动换频率不要超过 750ms。其他的没 有什么需要特别注意了。
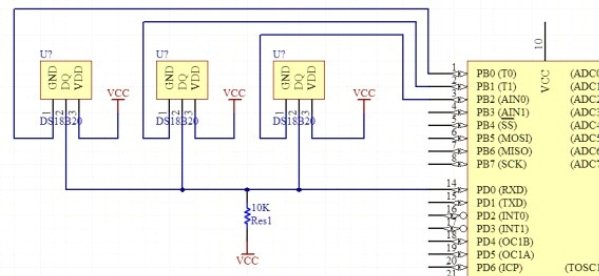
14.12一个多点测温的假想
以上是多点测温的一个假想,就是利用 GND 作于片选的角色。该方法有一个好处就是可以省去猥琐 的 ROM 指令,但是最为代价需要牺牲 IO 口,而且还控制好每一个 DS18B20 的执行次序。
|
评分
-
查看全部评分
|




 [复制链接]
[复制链接]










 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩



