基于单片机的红外风扇遥控原理图与C51程序,分享以下
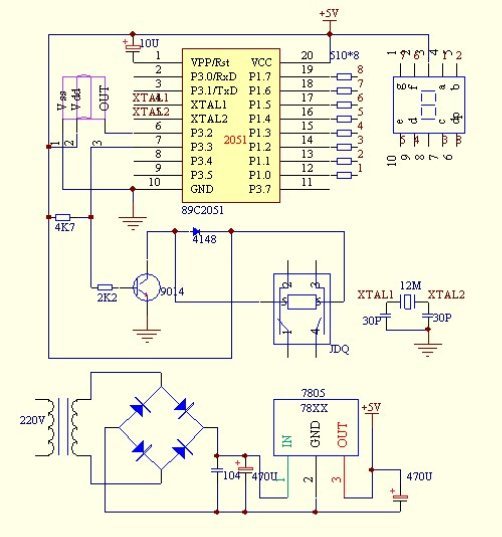
基于单片机的红外风扇遥控 市场上销售的带遥控的风扇价格普遍比较昂贵,如果能用普通的电视红外线遥控器来遥控风扇调档转速,对于DIY们来说,不但可以节约金钱,还可以提高自己的动手能力,何乐而不为呢? 本电路采用价格低廉的AT89C2051单片机为主控CPU,一体化接受头接受遥控器SSA3010T发出的编码,送CPU解码后,CPU控制相应的单片机动作! 具体的原理图如下: 为叙述方便起见,上图只画出了P3_3引脚的相应连接电路,还有2个可接在P3_0和P3_5上。分别控制风扇的高、中、低档。7段共阳数码管显示相应的档数,当按下遥控器的1、2、3键,分别显示1、2、3。按下遥控器OFF键不显示并关闭风扇的运行! 红外线一体化接受头引脚如下: 1为GND 2为VCC 3为DATA SAA3010T电视遥控器的数据码值表如下: ***************************************************** *[开关]55D2 [静音]55D3 *[1]55AB [2]55AC [3]55AD [4]55B2 *[5]55B3 [6]55B4 [7]55B5 [8]55CA *[9]55CB [0]55AA [单/双]55CC [调谐]5554 *[节目+]56AA [节目-]56AB [微调+]56CD [微调-]56D2 *[音量+]552A [存储]56CB [召回]55D5 *[音量-]552B [爱好]55D4 [定时]56B4 *[对比+]5552 [色彩+]5532 [亮度+]5526 [录像]564A *[对比-]5553 [色彩-]5533 [亮度-]55D2 [电视]5655 ***************************************************** C51控制程序具体如下: /*------------------------------------------------------------------------------------------------ 本程序采用SAA3010T电视遥控器 若没有SAA3010T的遥控器,读者可获知相应的编码, 更改CASE语句里的相应的数据,即可! 这里不在叙述如何获知编码,望读者谅解! --------------------------------------------------------------------------------------------------*/ #include <AT89x51.h> static unsigned char data IRCode[3],IRCON,IRCON2; static unsigned char data DT; void main(void) { unsigned int de; TMOD = 0x01; //定时器0方式1 EA = 1; //允许CPU中断 IT0 = 1; //INT0下降沿有效 EX0 = 1; //开INT0中断 P3_3=0x00; P3_0=0x00; P3_5=0x00; P1=0Xc0; //上电复位显示“0” do { for (de=0; de<8000; de++) P3_6 = 1; //LED点亮 for (de=0; de<8000; de++) P3_6 = 0; //LED熄灭 if (DT) { EX0=0; //关闭外中断 for (de=0; de<30000; de++) //按键值正确后会有一个延时,防止重复按键 P3_6 = 1; for (de=0; de<30000; de++) P3_6 = 0; DT = 0; } EX0 = 1; }while(1); } //定时器0中断处理 void timeint(void) interrupt 1 using 2 { TH0=0xFC; //TH0=0XFC;TL0=0XE0 TL0=0xE0; //设定时值为800us if (IRCON<3) { if (IRCON2<8) //中断一次读一次遥控接收头的状态,每二次为遥控编码中的一个位 { IRCON2++; IRCode[IRCON]=IRCode[IRCON]<<1;//每读一次放入变量中的二进制的一个位,每次左移一位 IRCode[IRCON]=IRCode[IRCON] | P3_2; //每八次填满一个字节,一个字节存放遥控编码4个位 } else { IRCON++; //填满一个字节,指向下一个变量 IRCON2=0; //计数清零 } } else { TR0 = 0; //关闭定时器 ET0 = 0; //定时器0中断关闭 if ((IRCode[1] != 0xFF) && (IRCode[2] != 0xFF)) { if (IRCode[1] == 0x55) { switch (IRCode[2]) { case 0xAB:P1=0Xf9;P3_3=0x01;P3_0=0x00;P3_5=0x00;DT = 1;break; case 0xAC:P1=0Xa4;P3_0=0x01;P3_5=0x00;P3_3=0x00;DT = 1;break; case 0xAD:P1=0Xb0;P3_5=0x01;P3_3=0x00;P3_0=0x00;DT = 1;break; case 0xD2:P1=0xff;P3_3=0x00;P3_0=0x00;P3_5=0x00;DT = 1;break; default :break; }//switch } } } } //INT0中断 void INT0Fun(void) interrupt 0 using 2 { EX0 = 0; //外部中断0关闭 ET0 = 1; //定时器0中断打开 TH0=0xFC; TL0=0xE0; //设定时值为800us for (IRCON=0; IRCON<3; IRCON++) IRCode[IRCON] = 0; IRCON = 0; IRCON2 = 0; //计数清零 TR0 = 1;//开始计数 } 实物图片如下: 聪明的读者可以再增加几个键来设定风扇运行的时间,最后提醒大家一点:因涉及了220V的高压,所以一定要注意人身安全!!! 单片机C51控制程序参考鉴戒了明浩站长的,再此深表感谢!

全部资料51hei下载地址:
 基于单片机的红外风扇遥控原理图与C51程序.rar
(258.65 KB, 下载次数: 118)
基于单片机的红外风扇遥控原理图与C51程序.rar
(258.65 KB, 下载次数: 118)
| 
 [复制链接]
[复制链接]