第一次发帖,有什么不好的会改进
适合小白的教程,只是简单的寻迹功能,
文件包含程序代码,原理图
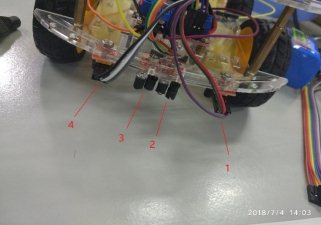
制作出来的实物图:

简单寻迹小车教程 
一个89c51或者89c52单片机- 一个4路红外线多路探测系统
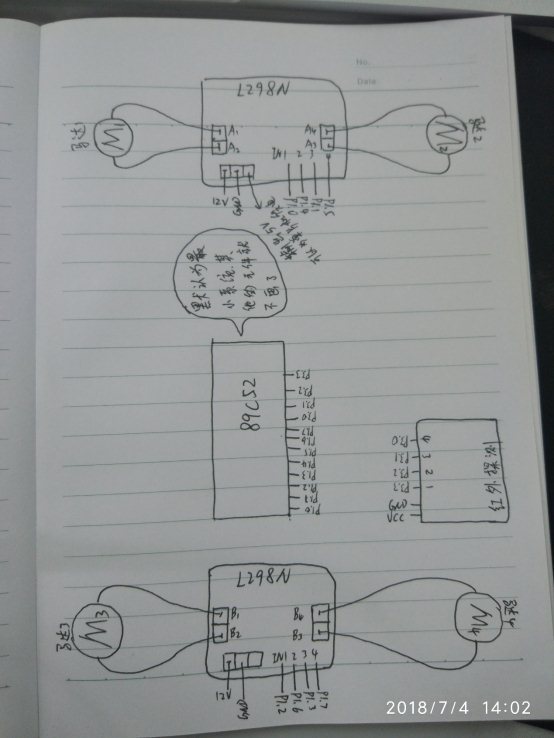
 如果有条件的话,可以买模板 如果有条件的话,可以买模板 原理图,因为某某原因,只能手画了,有点丑,慢慢看
- 89c52单片机是要有最小系统的,我的原理图上没有画出来,不懂的百度“最小系统”,本次实践只是应用单片机的P1端口和P3端口
- 其中P3口是用来检测红外线信号的
P3.0连接1号红外线端口 P3.1连接2号红外线端口 P3.2连接3号红外线端口 P3.3连接4号红外线端口 (注;我这里的1234号红外线端口可能和板子是的印刷字不一样) 马达1是由P1.0和P1.4控制 马达2是由P1.1和P1.5控制 马达3是由P1.2和P1.6控制 马达4是由P1.3和P1.7控制 (解释;在L298N模板上,IN1输入高电平,那么OUT1输出高电平,如果IN1是低电平,那么OUT1也是低电平)同理 IN1----------OUT1 IN2----------OUT2 IN3----------OUT3 IN4----------OUT4 (L298N模板上有印刷IN,OUT的字样) 如果要马达转动,对应的端口输入一个高电平,一个低电平就行了,
单片机源程序如下:
所有资料51hei提供下载:
 简单寻迹小车教程.rar
(14.51 MB, 下载次数: 136)
简单寻迹小车教程.rar
(14.51 MB, 下载次数: 136)
| 



 [复制链接]
[复制链接]








 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

