ЕкЪЎЮхНьЁАГЄЭЈБЁБДѓбЇЩњЕчзгЩшМЦОКШќ
бМЃаЁГЕЃЈIЬтЃЉ
еЊ вЊ
ЫцзХЯжДњЛЏЕФВЛЖЯЗЂеЙЃЌжЧФмЫЎЦНж№НЅНјВНЃЌФГаЉжЧФмв§ЕМЛњЦїШЫвбОж№ВНГіЯждкЮоШЫМнЪЛЛњЖЏГЕЃЌВжПтЃЌЮоШЫПьЕнЙЄГЇМАЗўЮёЛњЦїШЫЕШЗНУцЃЌжЧФмбМЃаЁГЕОЭЪЧЦфжавЛИіживЊЕФгІгУЗНЯђЁЃБОЮФТлЪіСЫжЧФмбМЃаЁГЕЕФПижЦЙ§ГЬЃЌБОЩшМЦВЩгУSTC89C516RD+ЕЅЦЌЛњзїЮЊжЧФмаЁГЕЕФПижЦКЫаФЃЌдЫгУКьЭтЖдЙмДЋИаЦїМьВтЕРТЗЧщПіЃЌЪЖБ№АзЩЋТЗУцжабыЕФКкЩЋБъЪЖЯпЃЌВЩМЏаХКХВЂНЋаХКХзЊЛЛЮЊФмБЛЕЅЦЌЛњЪЖБ№ЕФЪ§зжаХКХЃЌдкЕчЛњЧ§ЖЏжаЃЌВЩгУL298NЕчЛњЧ§ЖЏФЃПщПижЦжБСїЕчЛњЃЌЭЈЙ§ЯргІГЬађЭъГЩЫЋЯпбМЃМАздЖЏВДГЕЃЌздЖЏБмеЯЃЌећЬхЯЕЭГЕчТЗЩшМЦМђЕЅЃЌПЩППадФмИпЁЃ
ФП ТМ
еЊ вЊ
ФП ТМ III
1 ЯЕЭГЗНАИ
1.1 жЧФмбМЃаЁГЕПижЦаОЦЌЕФТлжЄгыбЁдё
2 ЯЕЭГРэТлЗжЮігыМЦЫу
2.1 ЯЕЭГећЬхЕФЗжЮі
2.1.1 ЫљгУдЊМўЕФЗжЮі 1
2.1.2 ЯЕЭГФЃПщгыНгЯпЗжЮі 2
2.1.3 аЁГЕЕчдДФЃПщЗжЮі 2
2.1.4 ЕчЛњЧ§ЖЏФЃПщЗжЮі 2
2.1.5 КьЭтбМЃФЃПщЗжЮі 3
3 ЕчТЗгыГЬађЩшМЦ 3
3.1 ЕчТЗЕФЩшМЦ 4
3.1.1 ЯЕЭГзмЬхПђЭМ 4
3.1.2 Ч§ЖЏЯЕЭГПђЭМгыЕчТЗдРэЭМ 4
3.2 ГЬађЕФЩшМЦ 5
3.2.1 ГЬађЙІФмУшЪігыЩшМЦЫМТЗ 5
3.2.2 ГЬађСїГЬЭМ 5
4 ВтЪдЗНАИгыВтЪдНсЙћ 6
4.1 ВтЪдЗНАИ 6
4.2 ВтЪдЬѕМўгывЧЦї 6
4.3 ВтЪдНсЙћМАЗжЮі 6
4.3.1 ВтЪдНсЙћ(Ъ§Он) 6
4.3.2 ВтЪдЗжЮігыНсТл 7
5 аФЕУЬхЛс 7
ИНТМ1ЃКЕчТЗдРэЭМ 8
ИНТМ2ЃКдДГЬађ 10
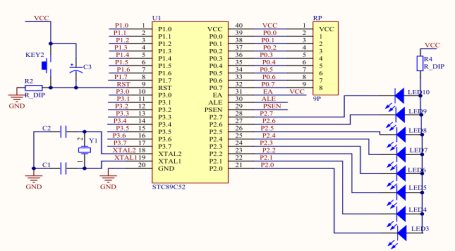
бМЃаЁГЕЃЈIЬтЃЉ 1 ЯЕЭГЗНАИ 1.1жЧФмаЁГЕПижЦаОЦЌЕФТлжЄгыбЁдё ЗНАИ1ЃКВЩгУAtmelЙЋЫОЕФAT89C516RD+ЕЅЦЌЛњзїЮЊжЧФмаЁГЕЕФжїПиаОЦЌЃЌ AT89C516RD+ЪЧвЛжжЕЭЙІКФЁЂИпадФмCMOS8ЮЛЮЂПижЦЦїЃЌЙЄзїЕчбЙЮЊ5VЃЌ32ИіI/OПкЃЌОпга 8K дкЯЕЭГПЩБрГЬFlash ДцДЂЦїЁЃИУаОЦЌМлИёБувЫЃЌгІгУЙуЗКЃЌВйзїМђЕЅЃЌгВМўгыШэМўЩшМЦЯрЖдМђЕЅЁЃДѓбЇЩњЙуЗКгУгкЕЅЦЌЛњбЇЯАгыДДзїЁЃзЪдДзуЙЛгУгкжЧФмаЁГЕЕФЩшМЦЁЃвђДЫЃЌБОЩшМЦбЁдёСЫДЫаОЦЌЁЃ ЗНАИ2ЃКВЩгУЕЅЦЌЛњMSP430F1611зїЮЊжЧФмаЁГЕЕФжїПиаОЦЌЃЌMSP430F1611ЪЧвЛПюГЌЕЭЙІКФЕЅЦЌЛњЃЌЙЄзїЕчбЙЗЖЮЇЮЊ1.8V-3.6V,48 ЮЛI/O ПкЯпЃЌ16-Bit RISC МмЙЙЃЌЕЋЯргІгВМўИДдгЃЌШэМўБраДЯрЖдФбЖШДѓЃЌЖјЧвМлИёАКЙѓЃЌгУгкжЧФмаЁГЕзЪдДЙ§ЪЃЃЌдьГЩРЫЗбЁЃЫљвдЮвУЧЗХЦњСЫДЫЗНАИЁЃ ЗНАИ3ЃКВЩгУAT89C51ЕЅЦЌЛњЃЌ4kзжНкFlash ЩСЫйДцДЂЦїЃЌ128зжНкФкВПRAMЃЌ32 ИіI/O ПкЯпЃЌСНИі16ЮЛЖЈЪБ/МЦЪ§ЦїЃЌвЛИі5ЯђСПСНМЖжаЖЯНсЙЙЃЌвЛИіШЋЫЋЙЄДЎааЭЈаХПкЃЌЦЌФкеёЕДЦїМАЪБжгЕчТЗЁЃЯжвбБЛC52ж№НЅШЁДњЃЌЙЪЗХЦњЁЃ БОЩшМЦЗНАИВЩгУЗНАИвЛжаЕФвзгкВйзїЕФAT89C516RD+ЕЅЦЌЛњзїЮЊЕчаХКХДІРэЁЂПижЦЕчЛњЧ§ЖЏвдМАКьЭтбАМЃЙІФмЁЃ 2 ЯЕЭГРэТлЗжЮігыМЦЫу 2.1ЯЕЭГећЬхЕФЗжЮі 2.1.1 ЫљгУдЊМўЕФЗжЮі ЃЈ1ЃЉВЩгУAT89C516RD+жїПиаОЦЌЁЃ - ВЩгУL298NзїЮЊЕчЛњЧ§ЖЏФЃПщЕФжїаОЦЌЁЃ
- ВЩгУКьЭтЖдЙмжЦзїКкЯпМьВтФЃПщЁЃ
- ВЩгУГЌЩљВЈДЋИаЦїзїЮЊБмеЯФЃПщЁЃ
2.1.2 ЯЕЭГФЃПщгыНгЯпЗжЮі ЃЈ1ЃЉЖдЕЅЦЌЛњЕФГЬађБрГЬгыЩеТМ ГЬађВЩгУcгябдБрГЬЃЌЭЈЙ§keil uVision4ШэМўЖдГЬађНјааЕїЪдвдМАЖдПЩвддЫааЕФГЬађЩњГЩЕЅЦЌЛњПЩвддЫааЕФhexЮФМўЃЛГЬађЕФЩеТМВЩгУstc-isp-15-v6.85ЩеТМШэМўЃЛгУUSBзЊTTLаЁАхИјЕЅЦЌЛњЩеТМГЬађЁЃаЁАхЕФRXНгЕЅЦЌЛњЕФTXЃЈp3.1ЃЉ,TXНгЕЅЦЌЛњЕФRXЃЈp3.0ЃЉЃЌGNDНгЕЅЦЌЛњЕФGNDЃЌVCCНгЕЅЦЌЛњЕФVCCЁЃЕЋашвЊзЂвтЕФЪЧдкгУЩеТМШэМўИјЕЅЦЌЛњЩеТМГЬађЪБвЊгУРфЦєЖЏЃЌМДЯШЕуЛїЁЎЯТди/БрГЬЁЏАДХЅЃЌдйНЋUSBаЁАхЕФVCCСЌНгЕЅЦЌЛњЕФVCCЁЃ 2.1.3 аЁГЕЕФЕчдДФЃПщЗжЮі 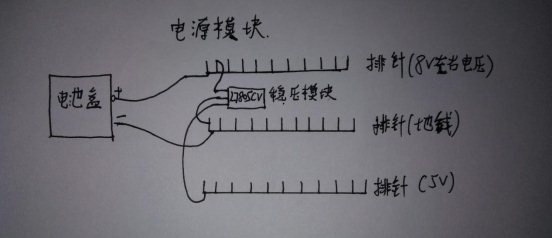 ЕчГиФЃПщВЩгУ4НкИЩЕчГиЖдаЁГЕЫЭЕчЁЃЕчЛњЕФдЫааашвЊ8VзѓгвЕФЕчбЙЃЌЖјЕЅЦЌЛњЁЂГЌЩљВЈЁЂвдМАКьЭтФЃПщЖМашвЊЮШЖЈЕФ5vЕФТпМЕчбЙЃЛвђДЫВЩгУL7805CVЮШбЙаОЦЌЪфГіЮШЖЈЕФ5vЕчбЙЁЃ ЕчГиФЃПщВЩгУ4НкИЩЕчГиЖдаЁГЕЫЭЕчЁЃЕчЛњЕФдЫааашвЊ8VзѓгвЕФЕчбЙЃЌЖјЕЅЦЌЛњЁЂГЌЩљВЈЁЂвдМАКьЭтФЃПщЖМашвЊЮШЖЈЕФ5vЕФТпМЕчбЙЃЛвђДЫВЩгУL7805CVЮШбЙаОЦЌЪфГіЮШЖЈЕФ5vЕчбЙЁЃ
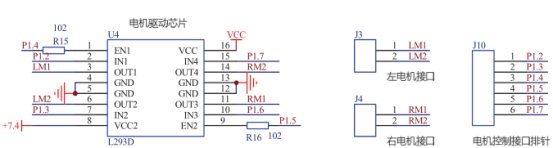
ЭМ1 ЕчдДФЃПщ 2.1.4ЕчЛњЧ§ЖЏФЃПщЗжЮі 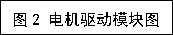 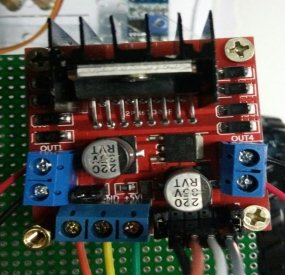 ЕчЛњЧ§ЖЏВЩгУL298NМЏГЩаОЦЌгыЕЅЦЌЛњКЭЕчЛњСЌНгЁЃЭЈЙ§ЕЅЦЌЛњдЫааГЬађНЋИпЕЭЕчЦНЫЭИјЧ§ЖЏФЃПщДгЖјПижЦЕчЛњЕФЧАНјЁЂКѓЭЫЁЂзѓзЊЁЂКѓДЋЁЂЭЃжЙЁЃЕчЛњЧ§ЖЏМЏГЩАхздДјЮШбЙаОЦЌИпбЙЖЫНгЕчдДЕчбЙЃЈ8vзѓгвЃЉЃЌGNDНгЕиЯпЃЌШЛКѓЪфГі5vЕчбЙЃЛout1ЁЂout2гУЕМЯпКЭзѓЕчЛњСЌНгЃЌout3ЁЂout4гУЕМЯпКЭгвЕчЛњСЌНгЁЃЧ§ЖЏФЃПщЕФIN1ЁЂIN2гыЕЅЦЌЛњЕФp1.2ЁЂp1.3СЌНгЃЌIN3ЁЂIN4гыЕЅЦЌЛњ ЕФp1.6ЁЂp1.7СЌНгЁЃЪЙФмЖЫENAЁЂENBЭЈЙ§ЬјУБСЌНгЁЃ ЕчЛњЧ§ЖЏВЩгУL298NМЏГЩаОЦЌгыЕЅЦЌЛњКЭЕчЛњСЌНгЁЃЭЈЙ§ЕЅЦЌЛњдЫааГЬађНЋИпЕЭЕчЦНЫЭИјЧ§ЖЏФЃПщДгЖјПижЦЕчЛњЕФЧАНјЁЂКѓЭЫЁЂзѓзЊЁЂКѓДЋЁЂЭЃжЙЁЃЕчЛњЧ§ЖЏМЏГЩАхздДјЮШбЙаОЦЌИпбЙЖЫНгЕчдДЕчбЙЃЈ8vзѓгвЃЉЃЌGNDНгЕиЯпЃЌШЛКѓЪфГі5vЕчбЙЃЛout1ЁЂout2гУЕМЯпКЭзѓЕчЛњСЌНгЃЌout3ЁЂout4гУЕМЯпКЭгвЕчЛњСЌНгЁЃЧ§ЖЏФЃПщЕФIN1ЁЂIN2гыЕЅЦЌЛњЕФp1.2ЁЂp1.3СЌНгЃЌIN3ЁЂIN4гыЕЅЦЌЛњ ЕФp1.6ЁЂp1.7СЌНгЁЃЪЙФмЖЫENAЁЂENBЭЈЙ§ЬјУБСЌНгЁЃ
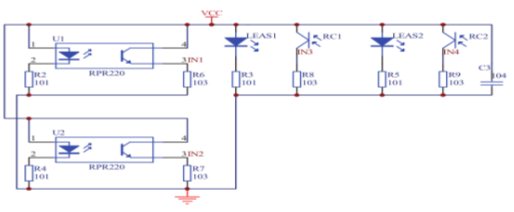
2.1.5 КьЭтбАМЃФЃПщЗжЮі  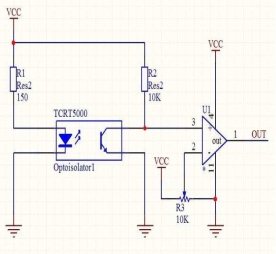 КьЭтбАМЃВЩгУСНИіМЏГЩЕФКьЭтЖдЙмЁЃКьЭтЖдЙмгаЗЂЩфЙмКЭНгЪеЙмЃЌЗЂЩфЙмЗЂЩфКьЭтЯпЃЌНгЪеЙмНгЪеЁЃвЛИіКьЭтЖдЙмга3Иів§НХЃЌVCCв§НХНг5vЕчЦНЃЌGNDв§НХНгЕиЃЌOUTв§НХЪфГіИпЕЭЕчЦНВЂЭЈЙ§ЖХАюЯпгыЕЅЦЌЛњСЌНгЁЃзѓКьЭтЖдЙмгыЕЅЦЌЛњp3.7в§НХСЌНгЃЌгвКьЭтЖдЙмгыЕЅЦЌЛњp3.6в§НХСЌНгЁЃШєУЛгабА КьЭтбАМЃВЩгУСНИіМЏГЩЕФКьЭтЖдЙмЁЃКьЭтЖдЙмгаЗЂЩфЙмКЭНгЪеЙмЃЌЗЂЩфЙмЗЂЩфКьЭтЯпЃЌНгЪеЙмНгЪеЁЃвЛИіКьЭтЖдЙмга3Иів§НХЃЌVCCв§НХНг5vЕчЦНЃЌGNDв§НХНгЕиЃЌOUTв§НХЪфГіИпЕЭЕчЦНВЂЭЈЙ§ЖХАюЯпгыЕЅЦЌЛњСЌНгЁЃзѓКьЭтЖдЙмгыЕЅЦЌЛњp3.7в§НХСЌНгЃЌгвКьЭтЖдЙмгыЕЅЦЌЛњp3.6в§НХСЌНгЁЃШєУЛгабА
ЕНКкЯпЃЌНгЪеЙмНгЪеЕНЗДЩфЕФКьЭтЙтЃЌЙтУєЕчзшБфаЁЃЌЪфГіЕЭЕчЦНЁЎ0ЁЏЃЛШєбАЕНКкЯпЃЌНгЪеЙмВЛФмНгЪеЕНКьЭтЙтЃЌЙтУєЕчзшДѓаЁВЛБфЃЌЪфГіИпЕчЦНЁЎ1ЁЏЃЛЕЅЦЌЛњДІРэИпЕЭЕчЦНВЂИјЕчЛњЧ§ЖЏФЃПщЪфГіУќСюЃЌДгЖјПижЦЕчЛњЕФдЫааЁЃ 3 ЕчТЗгыГЬађЩшМЦ ИљОнЬтФПвЊЧѓЃЌАбММЪѕжИБъЗжХфЕНЗНПђЭМЛђжїСїГЬЭМжаИїВПЗжЃЈМДИїЕЅдЊЕчТЗЛђГЬађФЃПщжаЃЉЁЃЩшМЦИїЕЅдЊжЎМфЕФЦЅХфЙиЯЕЖдИїЕЅдЊЕФММЪѕвЊЧѓЁЃ 3.1 ЕчТЗЕФЩшМЦ 3.1.1ЯЕЭГзмЬхПђЭМ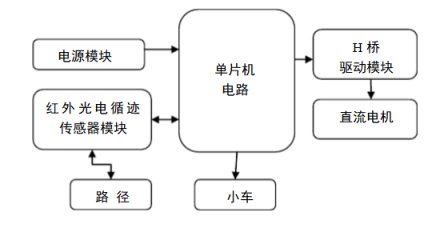 ЭМ4 ЯЕЭГзмЬхПђЭМ 3.2 ГЬађЕФЩшМЦ 3.2.1ГЬађЙІФмУшЪігыЩшМЦЫМТЗ ГЬађгааЁГЕжБзпЃЌзѓзЊЃЌгвзЊЃЌЭЃжЙЃЌбгЪБЃЌбАМЃзгГЬађЁЃ гУIfКЭwhileЕШгяОфНЋаЁГЕбАЕНКкМЃвдМАзпдкАзЯпЩЯгУЁЎ0ЁЂ1ЁЏБэЪОЁЃбАЕНКкМЃЪфГіЮЊЁЎ1ЁЏЃЌЮДбАЕНЪфГіЮЊЁЎ0ЁЏЁЃЁЎIN1=1,IN2=0ЁЏБэЪОаЁГЕзѓТже§зЊЃЛЁЎIN3=1,IN4=0ЁЏБэЪОаЁГЕгвТже§зЊЃЛЁЎIN1=0,IN2=1ЁЏБэЪОаЁГЕзѓТжЕЙзЊЃЛЁЎIN3=0,IN4=1ЁЏБэЪОаЁГЕгвТжЕЙзЊЃЛЁЎIN1=1,IN2=0ЃЌIN3=1,IN4=0ЁЏБэЪОаЁГЕжБзпЃЛЭЈЙ§КьЭтбАМЃФЃПщЯђЕЅЦЌЛњв§НХЪфГіЁЎ0ЁЂ1ЁЏЕчЦНЃЌДгЖјЕЅЦЌЛњПижЦЕчЛњЧ§ЖЏаОЦЌЧ§ЖЏЕчЛњбАМЃаазпЁЃ 3.2.2ГЬађСїГЬЭМЃКМћИНТМ1 4 ВтЪдЗНАИгыВтЪдНсЙћ ИљОнзмЬхЩшМЦЖдИїЕЅдЊЕчТЗЕФвЊЧѓЃЌЪЕВтИУЕЅдЊЕчТЗЕФЖдгІжИБъЁЃгУБэИёЕФаЮЪНСаГіЪЕВтЪ§ОнМАЪЕВтЪБЫљгУвЧЦїЩшБИЕФУћГЦЁЂаЭКХЁЃгааЉЪ§ОнзюКУФмЛГіЪЕВтЧњЯпЁЃвЊЧѓЪ§ОнЁЂЧњЯпБиаыецЪЕЁЃ ИљОнЬтФПММЪѕвЊЧѓЃЌВтЪдзїЦЗећЬхММЪѕжИБъЁЃгУБэИёЕФаЮЪНСаГіЪЕВтЪ§ОнМАЪЕВтЪБЫљгУвЧЦїЩшБИЕФУћГЦЁЂаЭКХЁЃгааЉЪ§ОнзюКУФмЛГіЪЕВтЧњЯпЁЃвЊЧѓЪ§ОнЁЂЧњЯпБиаыецЪЕЁЃ 4.1 ВтЪдЗНАИ НЋЩшМЦЕФГЬађЩеТМЕНЕЅЦЌЛњжаЃЌВЂгУзджЦЕФШќЕРВтЪдаЁГЕЕФаазпЧщПіЃЛЭЈЙ§аЁГЕдкдЫаажаГіЯжЕФЮЪЬтдкГЬађжаНјааИќИФЃЌВЂМЬајНјаааазпВтЪдЁЃ 4.2 ВтЪдЬѕМўгывЧЦї ЬѕМўЃКЙтЯпе§ГЃЕФЗПМфЁЃ ЙЄОпЃККИЧЙЃЌКИЮ§ЃЌТнЫПЃЌТнЫПЕЖЃЌаЁЕРЃЌЧЏзгЕШЁЃ вЧЦїЃКЭђгУБэЃЌМЦЫуЛњЁЃ 4.3 ВтЪдНсЙћМАЗжЮі 4.3.1 ВтЪдНсЙћ(Ъ§Он) НсЙћЃКаЁГЕжЛФмНјааЕЅКкЯпбАМЃ 4.3.2ВтЪдЗжЮігыНсТл ЗжЮіЃКаЁГЕгВМўШБЩйКьЭтЪеЗЂЙмЃЌжЛФмНјааКкЯпбАМЃЃЛШэМўБрГЬВЛЪьСЗЃЌГЌЩљВЈБмеЯГЬађЮДФмЕїЪдГЩЙІЁЃ 5 аФЕУЬхЛс дкЪеЕНГЄЭЈБОКШќЭЈжЊКѓЃЌЦОНшзХаФжаЕФШШЧщгыКУЦцЃЌЮвУЧБубИЫйЕФзщЖгВЮМгЃЌЕЋВЮгыЙ§ГЬЪЧвьГЃМшаСгыРЇФбЕФЃЌППШШЧщЮовЩФбвдЭбгБЖјГіЃЌдкжкЖрЕФПЮЬтжаЃЌОЙ§ШЯецПМТЧЃЌзлКЯЪЕМЪвђЫиЃЌЮвУЧБубЁдёСЫбМЃаЁГЕЕФЬтФПЁЃ
гЩгкФджаУЛгаЫПКСЭЗаїЃЌЮвУЧОЭЗшПёЕФдкЭјТчЩЯбАеваХЯЂЃЌЯђзЈвЕадИќЧПЕФЛяАщЧѓдЎЃЌЛЙЙКТђСЫвЛИіГЩЦЗаЁГЕШЯецбаОПЁЃШЛЖјжЦзїЙ§ГЬШдШЛПВПРвьГЃЃЌаЁГЕЕФЦДНгЫуЪЧзюМђЕЅЕФвЛИіЛЗНкЃЌЕЋШчКЮдкгаЯоЕФУцАхКЯРэУРЙлЕФАВзАЩЯИїжжЯЕЭГЛЙЪЧШУЮвУЧЗбОЁСЫаФЫМЁЃСэЭтЃЌИїФЃПщЕФКИНгвВЪЧИіОЋЯИЛюЃЌЫфШЛЗДИДЕФаое§ЃЌГЂЪдНсЙћвВжЛФмЫуЪЧВюЧПШЫвтЁЃ
ЕБаЁГЕПЩвдзіМђЕЅЕФжБЯпдЫЖЏКѓЃЌЮвУЧБуЯыШУЦфЪЕЯжИќЖрЕФЙІФмЃЌПЩГЬађЕФБраДЩеШыгжЪЧКсиЈдкЮвУЧУцЧАЕФвЛЕРФбЬтЃЌзнШЛЪЧЗЯЧоЭќЪГЃЌЮвУЧвВжЛЪЧзіГіСЫМђЕЅЕФбМЃФЃПщЁЃЖдгкИќМгРЇФбЕФЙІФмЃЌгЩгкФмСІВЛзуЃЌЪБМфНєЦШЃЌПЮГЬНєеХЃЌжеОПЮДФмЪЕЯжЃЌЮвУЧЪЕдкЪЧИаЕНвХКЖгыапРЂЁЃ
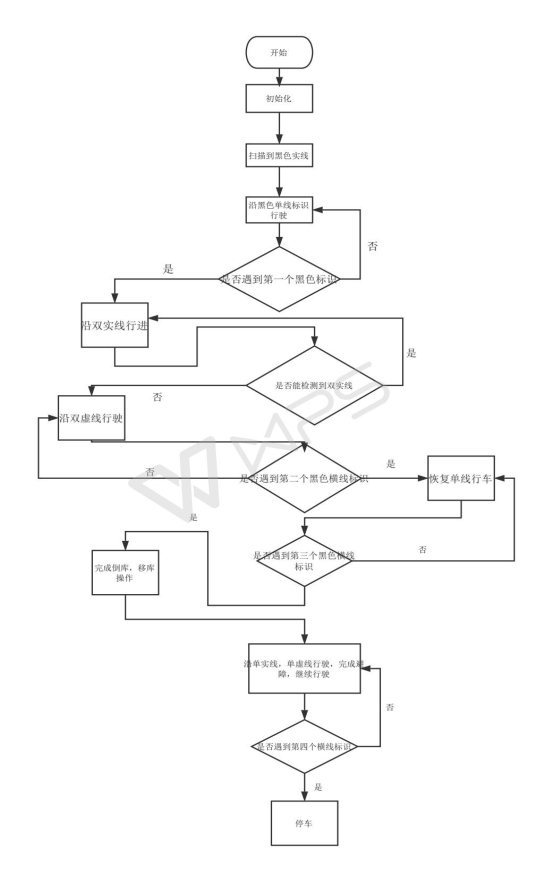
зюКѓЃЌЫфШЛЮвУЧЕФГЩЦЗЪЎЗжМђТЊЃЌЙІФмВЛШЋЃЌЕЋетжеЙщЪЧЮвУЧаЁзщХЌСІЕФГЩЙћЃЌЪЧЮвУЧЕФаФбЊжЎзїЁЃЮвУЧЖдздМКЫљзіЕФИаЕННОАСЃЌЖдЮДФмЪЕЯжЕФЛсМЬајбаОПЃЌЭъЩЦзїЦЗЁЃЮвУЧаЁзщВЛЪЧзюЧПЕФЃЌЕЋЮвУЧгУОЁШЋСІЃЌМсШчХЭЪЏЃЁ ИНТМ1ЃКЕчТЗдРэЭМ ЭМ12 ГЬађСїГЬЭМ
ЭъећЕФWordИёЪНЮФЕЕ51КкЯТдиЕижЗЃК
 бМЃаЁГЕ ЕчзгАц.docx
(499.79 KB, ЯТдиДЮЪ§: 44)
бМЃаЁГЕ ЕчзгАц.docx
(499.79 KB, ЯТдиДЮЪ§: 44)
| 




 ЙмРэдБQQ:125739409;ММЪѕНЛСїQQШК281945664
ЙмРэдБQQ:125739409;ММЪѕНЛСїQQШК281945664





 QQКУгбКЭШК
QQКУгбКЭШК QQПеМф
QQПеМф ЬкбЖЮЂВЉ
ЬкбЖЮЂВЉ ЬкбЖХѓгб
ЬкбЖХѓгб ЪеВи
ЪеВи ЬдЬћ
ЬдЬћ ЖЅ
ЖЅ ВШ
ВШ