
机器人走路步态说明
3.1 人形机器人关键步态确认 ;重心左移:机器人由原先站立状态重心做移,使机器人的中心在左脚板上,左脚受力支撑全身,右脚离地。实现方法:通过调节双脚的腰部舵机1和足舵机2使机器人达到如下图所示位置。其原理类似正方形变成平行四边形的过程。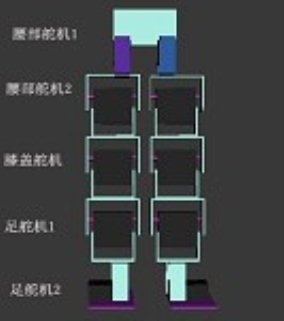 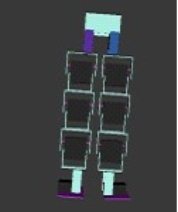 
②右脚脚跨出:在重心落在左脚的情况下,右脚向前跨出。实现方法调节要不舵机2和足舵机1.出于对步态平滑性的考虑注意右脚脚板与地面的平行,这样能是步态更看起来更简单;
右脚着地:同坐左脚腰部舵机2与舵机1的调节使机器人达到如下图所示位置,使机器人右脚着地,实现第一步的跨出。跨出步长不是越大越好,步长太大容易造成前进过程中重心移动太远造成不稳定。也不宜太小,没有效率。所以我在调试过程中得到的最佳步长为二分之一的脚6CM。
(图15)④中心左偏:通过腰部舵机1足舵机2 的调试使机器人重心右偏,将机器人重心落在机器人左脚。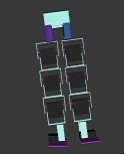
⑤跨出左脚:在上一图的基础上调节左脚的腰部舵机2足舵机1使机器人左脚跨出。
(图17)&左脚着地:原理同右脚着地。
重心左移右脚收回:通过脚步舵机1足舵机2实现重心的左移,然后收回右脚,使其与图13位置一样,这样就实现了连续前进,而不是每一步都从立正开始立正结束,使机器人的行走更拟人更自然。这里其实只要做到重心左移这个动作就已经完成了,只要循环这个动作组他就能循环到动作图13的位置实现,双足的循环前进这一过程。 这里要说明下为什么动作组要从重心偏移开始,因为机器人原先是站立的,从重心偏移开始行走能更自然的开始行走这是完全仿人的行走方式。
说明:
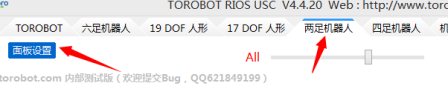
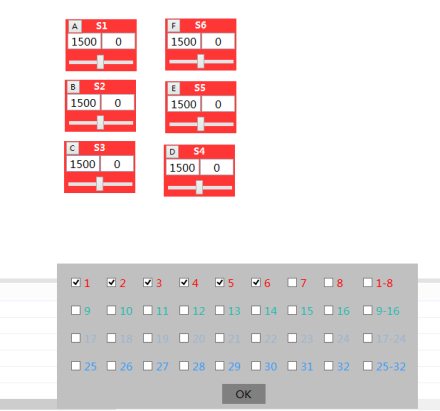
去掉不要的舵机面板,并且移动面板,使得形状排列和机器人相似。
拖动每个舵机面板的滑条,使得机器人处于站立的姿态。(双脚是直的,没有弯曲,脚板完全接触地面)
调整完机器人的状态之后,将该状态设置为初始位置
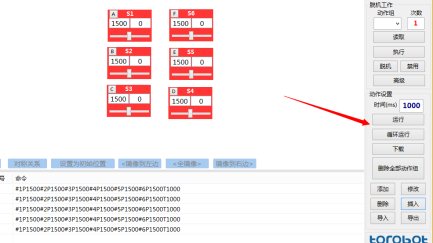
(每一个机器人的初始状态是不一样的,所以需要调整一下) 导入之后,点击右侧的“运行”,是运行一次 点击“循环运行”,是循环运行,直到点击“停止”才会停止。
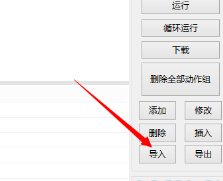
在第六步中,如果在线调试动作,测试动作完全正确之后,可以下载动作组到舵机控制板中了。
点击右侧的“下载”,开始下载动作组。 下载完了会提示下载成功,并且提示一个编号如 NO.1,意思就是说刚才下载的是动作组编号是1。
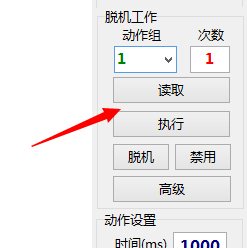
下载完成之后,执行指定的动作组。
首先点击“读取”,然后选择需要执行的动作组编号,然后输入执行次数,然后点“执行”,就会执行你设置的动作组。
脱机的意思是脱离电脑,执行动作组
设置方法如下:
首先点击“读取”,然后选择需要执行的动作组编号,然后输入执行次数,然后点“脱机”,就会把你选择的动作组设置为脱机自动执行(就是说舵机控制板上电的时候自动执行)
注意:执行次数不宜太长,否则会影响电脑软件联机,因为脱机执行的过程中,电脑是无法联机使用的,必须要等执行完毕才可以联机
全部资料51hei下载地址:
 双足机器人 程序.zip
(170.4 KB, 下载次数: 109)
双足机器人 程序.zip
(170.4 KB, 下载次数: 109)
 部分程序.rar
(2.25 KB, 下载次数: 59)
部分程序.rar
(2.25 KB, 下载次数: 59)
| 



 [复制链接]
[复制链接]









 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

