Лљгк51ЕЅЦЌЛњЕФЫЎЮТПижЦЯЕЭГжЦзї
ЪЪКЯгк51ЕЅЦЌЛњАЎКУеп
бЙЫѕЮФМўРягажЦзїЙ§ГЬЁЂДњТыгыдРэЭМЁЃ
БОЯЕЭГЩшМЦВЩгУЛљгкPIDЫуЗЈЕФЕЅЦЌЛњПижЦРДЪЕЯжЫЎЮТЕФЕїПиЁЃЕЅЦЌЛњПижЦВПЗжВЩгУAT89C51ЕЅЦЌЛњЮЊКЫаФЃЌВЩгУШэМўБрГЬЃЌЪЕЯжгУPIDЫуЗЈРДПижЦPWMВЈЕФВњЩњЃЌМЬЖјПижЦЕчТЏЕФМгШШРДЪЕЯжЮТЖШПижЦЁЃЭЈЙ§БрГЬЖдPIDИїВЮЪ§ЕФЕїећЃЌРДДяЕНЬсИпМгЮТЫйЖШЃЌМѕаЁГЌЕїЕФФПЕФЁЃ ЩшМЦШЮЮёКЭжївЊФкШн вЛЩ§ЫЎдк1kwЕчТЏЯТМгШШЃЌвЊЧѓЫЎЮТдквЛЖЈЗЖЮЇФкПЩгЩШЫЙЄЩшЖЈЃЌВЂФмдкЛЗОГЮТЖШНЕЕЭЪБздЖЏЕїНкЃЌвдБЃжЄЩшЖЈЕФЮТЖШЛљБОВЛБфЁЃ - ЮТЖШЩшЖЈЗЖЮЇЮЊ40~90ЁцЃЌзюаЁЧјЗжЖШЮЊ1ЁцЃЌБъЖЈЮТЖШаЁгкЕШгк1ЁцЁЃ
- ЛЗОГЮТЖШНЕЕЭЪБЮТЖШПижЦЕФОВЬЌЮѓВюаЁгкЕШгк1ЁцЁЃ
- гУЪЎНјжЦЪ§ТыЙмЯдЪОЫЎЕФЮТЖШЁЃ
- ВЩгУЪЪЕБЕФПижЦЗНЗЈЃЌЕБЩшЖЈЕФЮТЖШЭЛБфЪБЃЌМѕаЁЯЕЭГЕФЕїНкЪБМфКЭГЌЕїСПЁЃ
- ЮТЖШПижЦЕФОВЬЌЮѓВюаЁгкЕШгк0.2ЁцЁЃ
- дкЩшЖЈЮТЖШЗЂЩњЭЛБфЪБЃЌздЖЏДђгЁЫЎЮТЫцЪБМфБфЛЏЕФЧњЯпЁЃ
- ЯЕЭГЩшМЦдРэ

ИУЫЎЮТПижЦЯЕЭГжївЊгЩAT89S52ЕЅЦЌЛњПижЦЯЕЭГЁЂЮТЖШВЩбљзЊЛЛЦїЁЂЮТЖШПижЦЕчТЗЁЃМќХЬЯдЪОЕчТЗЕШЫФВПЗжзщГЩЃЌзмЬхПђЭМШчЩЯЁЃ ЃЈвЛЃЉзмЬхЗНАИТлжЄ ИљОнЬтФПЕФвЊЧѓЃЌЮвУЧЬсГіСЫвдЯТШ§жжЗНАИЃК ЗНАИ1ЃКВЩгУДЋЭГЕФЖўЮЛФЃФтПижЦЗНЗЈЃЌбЁгУФЃФтЕчТЗЃЌгУЕчЮЛЦїЩшЖЈИјЖЈжЕЃЌВЩгУЩЯЯТЯоБШНЯЕчТЗНЋЗДРЁЕФЮТЖШжЕгыИјЖЈЕФжЕБШНЯКѓЃЌОіЖЈМгШШЛђепВЛМгШШЁЃгЩгкВЩгУЕФФЃФтПижЦЗНЪНЃЌЯЕЭГЪмЛЗОГгАЯьНЯДѓЃЌВЛФмЪЕЯжИДдгЕФПижЦЫуЗЈЪЙПижЦОЋЖШзіЕУНЯИпЃЌЖјЧвВЛФмгУгкЯдЪОКЭМќХЬЩшЖЈЁЃ ЗНАИ2ЃКВЩгУЕЅЦЌЛњAT89S52ЮЊКЫаФЁЃВЩгУЪ§зжЮТЖШДЋИаЦїDS18B20ВЩМЏЮТЖШБфЛЏаХКХЃЌНЋЦфзЊЛЛГЩЪ§зжаХКХВЂЭЈЙ§ЕЅЦЌЛњДІРэКѓШЅПижЦЮТЖШЃЌЪЙЦфДяЕНЮШЖЈЁЃЪЙгУЕЅЦЌЛњОпгаБрГЬСщЛюЃЌПижЦМђЕЅЕФгХЕуЃЌЪЙЯЕЭГФмМђЕЅЕФЪЕЯжЮТЖШЕФПижЦМАЯдЪОЃЌВЂЧвЭЈЙ§ШэМўБрГЬФмЪЕЯжИїжжПижЦЫуЗЈЪЙЯЕЭГЛЙОпгаПижЦОЋЖШИпЕФЬиЕуЁЃ БШНЯЩЯЪіСНжжЗНАИЃЌЗНАИ2УїЯдИФЩЦСЫЗНАИ1ЕФВЛзуЃЌОпгаПижЦМђЕЅЁЂПижЦЮТЖШОЋЖШИпЕФЬиЕуЃЌвђДЫБОЩшМЦЕчТЗВЩгУЗНАИ2ЁЃ ЃЈЖўЃЉИїВПЗжЕчТЗЗНАИТлжЄ 1ЁЂЮТЖШВЩбљВПЗж ЗНАИ1ЃКВЩгУШШУєЕчзшЃЌПЩТњзу35Ёц--95ЁцЕФВтСПЗЖЮЇЃЌЕЋШШУєЕчзшОЋЖШЁЂжиИДадКЭПЩППадЖМБШНЯВюЃЌЖдгкМьВтОЋЖШаЁгк1ЁцЕФЮТЖШаХКХЪЧВЛЪЪгУЕФЁЃ ЗНАИ2ЃКВЩгУЪ§зжЮТЖШДЋИаЦїDS18B20ЁЃDS18B20ЪЧжЇГжвЛЯпзмЯпНгПкЕФЮТЖШДЋИаЦїЃЌОпгаПЙИЩШХадЧПЃЌЬхЛ§аЁЃЌСщЛюОМУЕФЬиЕуЁЃЫќЕФВтСПЮТЖШЗЖЮЇЮЊ-55Ёц~+125ЁцЃЌдк-10Ёц~+85ЁцЗЖЮЇФкЃЌОЋЖШЮЊЁР0.5ЁцЧвга9~12ЮЛЗжБцТЪПЩЕїЃЌЪЙгУЕчбЙЮЊ3~5VЮоашБИгУЕчдДЁЃДЫЭтDS18B20МЏКЯСЫ64ЮЛЙтПЬROMЁЂЮТЖШДЋИаЦїЁЂЗЧЛгЗЂЕФЮТЖШБЈОЏДЅЗЂЦїTHКЭTLЁЂХфжУМФДцЦїЃЌПЩвджБНгЪЕЯжЮТЖШЕФВтСПКЭзЊЛЛЃЌЮоашдйСэНгЭтВПЕчТЗЁЃ ЗНАИ3ЃКВЩгУЮТЖШДЋИаЦїAD590ЁЃAD590ОпгаЬхЛ§аЁЁЂжЪСПЧсЁЂЯпадЖШКУЁЂадФмЮШЖЈЕШгХЕуЁЃЦфВтСПЗЖЮЇдк-50Ёц~+150ЁцЃЌТњПЬЖШЗЖЮЇЮѓВюЮЊ ЁР0.3ЁцЃЌЕБЕчдДЕчбЙдк5~10жЎМфЃЌЮШЖЈЖШЮЊ1%ЪБЮѓВюжЛгаЁР0.01ЁцЃЌДЫЭтЃЌAD590ЪЧЮТЖШЁЊЕчСїДЋИаЦїЃЌЖдгкЬсИпЯЕЭГПЙИЩШХФмСІгаКмДѓАяжњЁЃ ДгЯЕЭГЕчТЗЩшМЦЕФИДдгЖШЃЌадМлБШЕШЗНУцПМТЧЃЌОіЖЈбЁгУЗНАИ2ЁЃ 2ЁЂПижЦЕчТЗВПЗж ЗНАИ1ЃКПЩвдгУТпМЕчТЗДюНЈвЛИіПижЦЦїЃЌЪЕЯжPIDПижЦЁЃЕЋЯЕЭГЛЙвЊИНМгЯдЪОЁЂЮТЖШЩшЖЈЕШЙІФмЃЌвЊИНМгКмЖрЕчТЗЃЌзмЬхЕФЕчТЗЩшМЦКЭжЦзїБШНЯЗБЫіЁЃ ЗНАИ2ЃКВЩгУ8031аОЦЌЃЌЦфФкВПУЛгаГЬађДцДЂЦїЃЌашвЊНјааЭтВПЭиеЙЃЌетИјЕчТЗдіМгСЫИДдгЖШЁЃ ЗНАИ3ЃКБОЗНАИЕФCPUФЃПщВЩгУ2051аОЦЌЃЌЦфФкВПга2KBЕЅдЊЕФГЬађДцДЂЦїЃЌВЛашвЊЭтВПЭиеЙГЬађДцДЂЦїЃЌЕЋгЩгкЯЕЭГгУЕННЯЖрЕФI/OПкЃЌвђДЫДЫаОЦЌЕФзЪдДВЛЙЛгУЁЃ ЗНАИ4ЃКВЩгУAT89S52ЕЅЦЌЛњЃЌЦфФкВПга8KBЕЅдЊЕФГЬађДцДЂЦїЃЌВЛашвЊЭтВПРЉеЙГЬађДцДЂЦїЃЌЖјЧвЦфI/OПкДя32ИіЃЌЭъШЋТњзуБОДЮЩшМЦашвЊЁЃ БШНЯет4жжЗНАИЃЌзлКЯЕФПМТЧЕЅЦЌЛњИїВПЗжзЪдДЃЌБОДЮЩшМЦбЁгУЗНАИ4ЁЃ 3ЁЂМгШШЗНАИКЭЙІТЪЕчТЗЕФбЁдё ЗНАИ1ЃКМгШШЕФзАжУЃЌИљОнЬтФПЃЌПЩвдЪЙгУЕчШШТЏНјааМгШШЃЌПижЦЕчТЏЕФЙІТЪЦёПЩПижЦМгШШЫйЖШЁЃЫЎЮТЙ§ИпЪБЃЌвЛАужЛФмЙиЕєЕчТЏЃЌШУЦфздШЛРфШДЁЃЮЊЧѓИќКУЕФПижЦаЇЙћЃЌвВПЩвдзАжУвЛИіаЁЗчЩШЃЌЕчТЏМгШШЪБЗчЩШЙиБеЃЌЫЎЮТГЌИпЪБЙиБеЕчТЏПЊЦєЗчЩШМгЫйЩЂШШЁЃ ЗНАИ2ЃКПЩвдВЩгУПЩПиЙшПижЦМгШШЦїЕФЙЄзїЁЃЭЈЙ§ЕЅЦЌЛњВњЩњPWMаХКХРДПижЦПЩПиЙшЕФЕМЭЈКЭЙиЖЯЃЌПижЦМгШШЦїЕФМгШШЪБМфЃЌДгЖјПижЦМгШШЦїЕФЙІТЪЁЃ 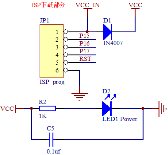 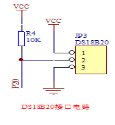 ДгМгШШЕФЯьгІЫйЖШПМТЧЃЌВЩгУЗНАИ2ЁЃвђЮЊМгШШЕФЙІТЪНЯДѓЃЌЙЪЕчдДВЩгУЪаЕч220ЗќЁЃ ЩшМЦЕчТЗЭМШчЭМ2ЫљЪО
 DS18B20 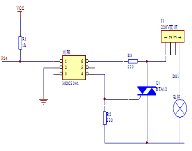 ISPЯТдиПк
AT89S52жїПиЕчТЗ MOC3041ЙІТЪЕчТЗ LCDвКОЇЯдЪО
  PCBЭМШчЯТ PCBЭМШчЯТЃК
ЙІТЪЕчТЗ жїПиЕчТЗ
БОЩшМЦзмЬхАќРЈЫФИіВПЗжЃКжїЛњПижЦВПЗжЁЂЮТЖШВЩбљзЊЛЛВПЗжЁЂЮТЖШПижЦВПЗжЁЂМќХЬЯдЪОВПЗжЁЃ 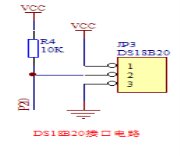 ЮТЖШВЩбљзЊЛЛЕчТЗ ЮТЖШВЩбљзЊЛЛЕчТЗ
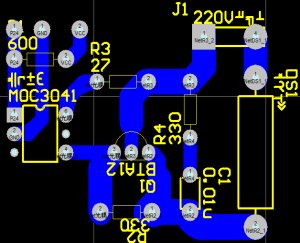
ЯЕЭГЕФЮТЖШВЩбљзЊЛЛгЩDS18B20МЏГЩаОЦЌРДЪЕЯжЁЃЕчТЗЭМШчгв DS18B20адФмУшЪі ВтСПЗЖЮЇдк-55Ёц~+125ЁцЃЌдк-10Ёц~+85ЁцЗЖЮЇФкЃЌОЋЖШЮЊЁР0.5ЁцЧвга9~12ЮЛЗжБцТЪПЩЕїЃЌЪЙгУЕчбЙЮЊ3~5VЃЌЮоашБИгУЕчдДЁЃ DS18B20ВЩгУЕЅзмЯпЭЈаХММЪѕЃЌЭЈаХЮШЖЈПЩППЃЌЧвЯпТЗМђЕЅЃЌШнвзЪЕЯжЁЃ ЦфЛљБОЕФЭЈаХЙ§ГЬШчЯТЃК жїЛњРЕЭЕЅзмЯпВњЩњжСЩй480usЕФTxИДЮЛТіГхЃЛ ШЛКѓгЩжїЛњЪЭЗХзмЯпЃЌНјШыRxНгЪеФЃЪНЃЌжїЛњЪЭЗХзмЯпЪБЛсВњЩњвЛИігЩЕЭЕчЦНБфЮЊИпЕчЦНЕФЩЯЩ§биЃЛ ЕЅзмЯпЦїМўМьВтЕНИУЩЯЩ§биКѓЃЌбгЪБ15~60usЃЛ ЕЅзмЯпЦїМўЭЈЙ§РЕЭзмЯп60~240usРДВњЩњгІД№ТіГхЃЛ жїЛњНгЪеЕНДгЛњЕФгІД№аХКХКѓЃЌЫЕУїгаЕЅзмЯпЦїМўдкЯпЃЌШЛКѓжїЛњОЭПЩвдПЊЪМЖдДгЛњНјааROMУќСюКЭЙІФмУќСюВйзїЁЃ DS18B20жБНгЪфГіЪ§зжСПЃЌПЩжБНггыЕЅЦЌЛњНјааЭЈаХЃЌЖСШЁВтЮТЪ§ОнЃЌЕчТЗЗЧГЃМђЕЅЁЃЪЙгУЫќЃЌжївЊЙЄзїСПМЏжадкСЫЕЅЦЌЛњБрГЬЩЯЁЃ 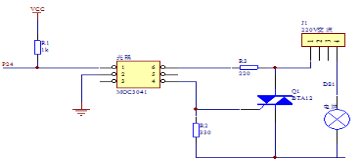 ДЫВПЗжЕчТЗжївЊгЩЙтЕчёюКЯЦїMOC3041КЭЫЋЯђПЩПиЙшBTA16зщГЩЁЃвдТіПэЕїжЦЪфГіПижЦЕчТЏгыЕчдДЕФНгЭЈКЭЖЯПЊБШР§ЃЌвдЭЈЖЯПижЦЕїбЙЗЈПижЦЕчТЏЕФЪфШыЙІТЪЁЃMOC3041ЕФФкВПМЏГЩСЫЗЂЙтЖўМЋЙмЁЂЙ§СуМьВтЕчТЗКЭвЛИіаЁЙІТЪЫЋЯђПЩПиЙшЁЃЕБЕЅЦЌЛњPWMЪфГіЮЊ1ЃЌMOC3041жаЕФЗЂЙтЖўМЋЙмЗЂЙтЃЌгУгкЙ§СуМьВтЕчТЗЕФЭЌВНзїгУЃЌФкВПЕФЫЋЯђПЩПиЙшдкЙ§СуКѓТэЩЯЕМЭЈЃЌДгЖјЪЙДЅЗЂЫЋЯђПЩПиЙшBTA16ЕМЭЈЃЌИКдижагаЕчСїЭЈЙ§ЃЌЗДжЎЕБЕЅЦЌЛњPWMЪфГіЮЊ0ЃЌЫЋЯђПЩПиЙшНижЙЃЌИКдижаУЛгаЕчСїЭЈЙ§ЁЃЙтЕчёюКЯЕФФЭбЙжЕЮЊ400vЃЌЫќЕФЪфГіМЖгЩЙ§СуДЅЗЂЕФЫЋЯђПЩПиЙшЙЙГЩЃЌЫќПижЦзХжїЕчТЗЫЋЯђПЩПиЙшЕФЕМЭЈКЭЙиБеЁЃПижЦВПЗжЕчТЗЭМШчЯТ
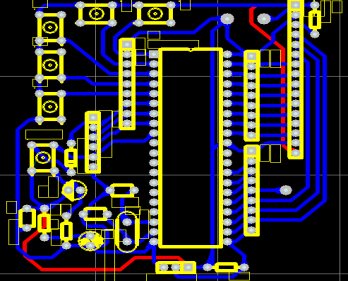
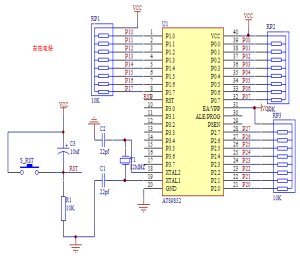
3ЁЂЕЅЦЌЛњПижЦВПЗж ДЫВПЗжЪЧИУЯЕЭГЕФКЫаФЃЌЯЕЭГЕФПижЦВЩгУСЫЕЅЦЌЛњAT89S52ЁЃЕЅЦЌЛњAT89S52ФкВПга8KBзжНкЕФПЩБрГЬFLASHДцДЂЦїКЭ256зжНкЕФЪ§ОнДцДЂЦїЁЃЙЪЯЕЭГВЛБиЭтЭиДцДЂЦїЃЌетбљДѓДѓМѕЩйСЫЯЕЭГЕФгВМўЕчТЗЁЃЕчТЗдРэЭМШчЯТЃК
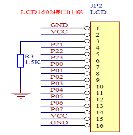
4ЁЂАДМќМАЯдЪОВПЗж ЯЕЭГНіВЩгУЮхИіАДМќРДНјааЮТЖШЕФПижЦЁЃ дкЯдЪОЗНУцЃЌЮвУЧВЩгУСЫLCD1602ЕФвКОЇЯдЪОФЃПщЃЌЭЈЙ§ШэМўБрГЬЃЌПЩвдЪЕЯжЫљашвЊЕФЯдЪОЁЃДЫЭтЃЌвКОЇФЃПщЕФЪЙгУвВБШНЯМђЕЅЃЌжЛвЊСЌНгЪ§ОнзмЯпЃЌбЁЭЈЖЫПкКЭУќСю/Ъ§ОнЖЫПкМДПЩЁЃ ЯЕЭГЕФгВМўЩшМЦОЁСПМђЕЅЃЌЙЪЙЄзїШЮЮёжївЊдкГЬађЕФЩшМЦЩЯЁЃ
PIDЫуЗЈПижЦPWMЪфГіЃК
ГЬЭМШчЯТ
- void timer0() interrupt 1
- {
- uchar flag;
- TH0=0xd8 ; га
- TL0=0xf0 ;
- TR1=1 ; Юо
- P24=1 ; //ЦєЖЏЪфГі
- CJ++;
- if(stemp>Wtemperature) flag=0
- {
- ei=stemp-Wtemperature; flag=1
- E=E+ei;
- ex=ej-ei;
- ej=ei;
- if(ei<6)
- {Ui=U0-Kp*(ei+Ti*E-Td*ex);}
- else Ui=U0-Kp*ei;
- flag=Ui/100;
- switch(flag)
- {
- case 9:{TH1=0xdc;TL1=0xd8;}break;
- case 8:{TH1=0xe2;TL1=0xb4;}break;
- case 7:{TH1=0xe8;TL1=0x90;}break;
- case 6:{TH1=0xec;TL1=0x78;}break;
- case 5:{TH1=0xf0;TL1=0x60;}break;
- case 4:{TH1=0xf2;TL1=0x54;}break;
- case 3:{TH1=0xf4;TL1=0x48;}break;
- case 2:{TH1=0xf8;TL1=0x30;}break;
- case 1:{TH1=0xfc;TL1=0x18;}break;
- case 0:{TH1=0xfd;TL1=0xa8;}break;
- default:{TH1=0xff;TL1=0xfa;}break;
- }
- }
- else {TH1=0xff;TL1=0xfa;}
- }
ГЬађгУT0КЭT1ЕФЧЖЬзРДЪЕЯжPWMВЈЃЌT0ПижЦВЈЕФЦЕТЪЃЌT1ПижЦеМПеБШЃЌЦфаЇЙћЭМШчЯТЃК
PIDПижЦЦїЃК PIDПижЦЦїВЩгУЕЅЦЌЛњШэМўЪЕЯжЁЃЪфГіPWMПижЦаХКХЃЌЖЈЪБЦїВЩгУT0,T1ЕФЧЖЬзЃЌT0ЖЈЪБЪЧ10MSЃЌT1ПижЦЕЭЕчЦНЕФЪфГіЁЃгЩгкМгШШЦїЪєгкДјжЭКѓЕФвЛНзЖдЯѓЃЌЙЪЪНжаKpЃЌKiЃЌKdЕФбЁдёШЁОігкМгШШЦїЕФНздОЯьгІЬиадКЭЪЕМЪОбщЃЌЮЊСЫЪЕЯжPIDВЮЪ§ЕФЪЕЪБећЖЈЃЌИїЮТЖШЧјМфгЩЪЕбщВтШЁзюМбЕФKpЃЌKiЃЌKdжЕЁЃ
1ЁЂЖЏЬЌЮТПиВтСП ВтСПЗНЪНЃКНгЩЯЯЕЭГЕФМгШШзАжУЃЌзАШы1LЪвЮТЕФЫЎЃЌЩшЖЈЮТПиЮТЖШЁЃМЧТМЕїНкЪБМфЁЂГЌЕїЮТЖШЁЂЮШЬЌЮТЖШВЈЖЏЗљЖШЕШЁЃ ВтСПЬѕМўЃКЛЗОГЮТЖШ18ЁцЃЌМгШШЦїЙІТЪ1000WЁЃ ВтСПНсЙћЪ§Он 2ЁЂНсЙћЗжЮі гЩвдЩЯВтСПНсЙћПЩМћЃЌЯЕЭГадФмЛљБОДяЕНСЫЫљвЊЧѓЕФжИБъЁЃ дкЮТПижИБъжаЃЌгАЯьЯЕЭГадФмЕФвђЫиКмЖрЃЌзюЙиМќЕФЪЧМгШШЦїБОЩэЕФЮяРэ аджЪМАПижЦЫуЗЈЁЃДЋИаЦїБиаыМгЩЯЗРЫЎЩшЪЉЃЌЙЪЮТЖШДЋИаФбУтГйжЭЃЌМгШШЦїЕФМгШШБОЩэгабгГйЃЌЫЎЖдСїДЋШШвВЛсдьГЩВтЮТЕФбгГйЃЌетаЉЖМЛсжБНггАЯьЯЕЭГЕФПижЦадФмЁЃПижЦЫуЗЈЗНУцЃЌашЗДИДЪЕбщБШНЯЃЌдкЩЯЩ§ЪБМфКЭГЌЕїСПжЎМфзіШЈКтЃЌбЁГізлКЯаЇЙћзюКУЕФPIDЯЕЪ§ЁЃ - ЩшМЦжагіЕНЕФЮЪЬтМАЦфНтОіЗНЗЈ
вђЮЊЪЧжБНгНгШы220VЕФЪаЕчЃЌЕБЕчТЗвЛЭЈЕчЃЌАхУцЮТЖШЭЛШЛЩ§ИпЃЌвджТЩеЛЕЕчТЗАхЁЃгкЪЧжЎКѓЮвУЧдкЕчТЗжаМгЩЯСЫЩЂШШЦЌЁЃ ЮТЖШДЋИаЦїDS18B20ВЛФмжБНгНўдкЫЎжаВтЮТЖШЃЌЙЪЮвУЧНЋЦфЙЬЖЈдквЛЕМШШадЯрЖдКУЕФН№ЪєЭВФкЃЌдйУЛШыЫЎжаВтСПЁЃ ЙІТЪЕчТЗЕФЪфГіЖЫдБОгІИУМгЩЯвЛИіЕчШнРДНУе§СуЯрЮЛЃЌШЛЖјЕБгВМўЕчТЗЖМзАКУКѓЃЌНјааЕїЪдЃЌЗЂЯжМгШШЦївЛжБЙЄзїЃЌУЛгаАьЗЈЪЕЯжЮТЖШЕФПижЦЃЌМьВщЗЂЯжЪЧЕчШнЕФЮЪЬтЁЃЕБМгЩЯЕчШнЪБЃЌдкНЛСїЕчЕФзїгУЯТЃЌЕчТЗжБНгЕМЭЈЃЌИљБОВЛашвЊЭтМгПижЦЃЌЙЪЮвУЧШЅЕєСЫИУЕчШнЃЌМгШШЦїетВХЪмПиЁЃ БОЯЕЭГЩшМЦЪЧвдAT89S51ЕЅЦЌЛњЮЊКЫаФЃЌВЩгУШэМўБрГЬЃЌдЫгУPIDЫуЗЈРДПижЦPWMВЈЕФВњЩњЃЌМЬЖјПижЦМгШШЦїЕФМгШШЪБМфРДЪЕЯжЮТЖШЕФПижЦЁЃдкШэгВМўЕФЕїЪдЙ§ГЬжаЃЌГіЯжСЫВЛЩйЮЪЬтЃЌШчЕчТЗАхЗЂЬЬЃЌГЬађВЛЦ№зїгУЃЌМгШШЫйЖШНЯТ§ЕШЃЌЕЋЪЧдкРЯЪІКЭЭЌбЇЕФжИЕМКЭАяжњЯТЃЌЭЈЙ§ЕчТЗМьВщЃЌГЬађаоИФЕШЙЄзїЃЌЮЪЬтЛљБОЩЯЖМЕУЕНСЫНтОіЁЃдкетвЛДЮЩшМЦЙ§ГЬжаЃЌЮвУЧСЫНтСЫКмЖрзЈвЕжЊЪЖЃЌЖЏЪжФмСІвВЕУЕНСЫЬсИпЁЃШЛЖјЃЌЯЕЭГЛЙДцдкзХвЛаЉЮЪЬтЃЌШчЫЎЮТДяЕНЮШЖЈЕФЪБМфЁЃ
ЕЅЦЌЛњдДГЬађШчЯТ:
- /***************************************************************
- ЯюФПУћГЦЃКЫЎЮТПижЦЯЕЭГЩшМЦЃЛ
- ЙІ ФмЃКЭЈЙ§STC89C52ЕЅЦЌЛњПижЦПЩПиЙшЧ§ЖЏМгЙ§СуМьВтЕчТЗзїЮЊ
- ЙІТЪПижЦЕчТЗРДПижЦМгШШЙ§ГЬ,ЭЈЙ§МќХЬЩЈУшРДЩшЖЈЫЎЮТЃЌ
- DS18B20ЪЕЪБВтСПЫЎЕФЮТЖШЃЌНЋЪЕМЪЫЎЮТгыЩшЖЈЫЎЮТБШНЯ
- ЭЈЙ§PIDПижЦЫуЗЈЕїНкЃЌЪЧЪЕМЪЫЎЮТгыЩшЖЈЫЎЮТНгНќЁЃДгЖј
- ДяЕНПижЦЫЎЮТЕФФПЕФЁЃ
- зї епЃК0903 нўвЛЗц
- Ше ЦкЃК2010Фъ11дТ3Ше
- ***************************************************************/
- #include<reg52.h>
- #include<stdio.h>
- #define uchar unsigned char
- #define uint unsigned int
- sbit s1=P2^0;
- sbit s2=P2^1;
- sbit s3=P2^2;
- sbit s4=P2^3;
- sbit s5=P2^4;
- sbit ds=P2^5;
- sbit beep=P2^6;
- sbit rd=P1^0;
- sbit rs=P1^1;
- sbit wr=P1^2;
- sbit lcden=P1^3;
- sbit PWM=P1^6;
- sbit led1=P1^4;
- sbit led2=P1^5;
- uchar set_temp,keytemp;
- uint temp;
- uchar c;
- bit flag,flag1,flag2;
- float f_temp,t;
- int timecount,z;
- float KP,KI,KD;
- float e1,e2,e3;
- float uk,duk;
- uchar HighL,HighH,PWMH;
- float k;
- uchar code table[]={"ЩшЖЈЮТЖШЃК"};
- uchar code table1[]={"ЪЕВтЮТЖШЃК"};
- uchar code table2[]={"МгШШ"};
- uchar code table3[]={"БЃЮТ"};
- uchar code table4[]={"зїепЃК0903Зцза@"};
- uchar code table5[]={"ЯЕЭГГѕЪМЛЏ"};
- uchar code table6[]={"measured Temperature"};
- uchar code table7[]={"ЫЎЮТПижЦЯЕЭГЩшМЦ"};
- uchar code table8[]={" "};
- void delay(uint z)//бгЪБКЏЪ§ЃЌбгЪБ5ms
- {
- uint x,y;
- for(x=z;x>0;x--)
- for(y=110;y>0;y--);
- }
- /***************************************
- МќХЬЩЈУшКЏЪ§
- ЭЈЙ§S5,S4,S3,S2,S1МќРДЗжБ№ЪЕЯжЮТЖШЩшЖЈжЕЕФ
- ДжМгЃЌДжМѕЃЌОЋМгЃЌОЋМѕЃЌКЭШЗЖЈЙІФмЁЃ
- ***************************************/
- void keyscan()
- {
- if(set_temp>=100)//НЋЩшЖЈЮТЖШЯоЖЈдк0-100ЖШжЎМф
- set_temp=100;
- if(set_temp<=0)
- set_temp=0;
- if(s5==0)//ДЫМќАДЯТЩшЖЈЮТЖШМг5
- {
- delay(10);
- if(s5==0)
- {
- flag1=0;
- set_temp+=5;
- if(set_temp>=100)
- {
- set_temp=100;
- beep=0;
- delay(1000);
- beep=1;
- }
- }while(s5==0);
- }
- if(s4==0)//ДЫМќАДЯТЩшЖЈЮТЖШМѕ5
- {
- delay(10);
- if(s4==0)
- {
- flag1=0;
- set_temp-=5;
- if(set_temp<=0)
- {
- set_temp=0;
- beep=0;
- delay(1000);
- beep=1;
- }
- }while(s4==0);
- }
- if(s3==0)//ДЫМќАДЯТЩшЖЈЮТЖШМг1
- {
- delay(10);
- if(s3==0)
- {
- flag1=0;
- set_temp++;
- if(set_temp==100)
- {
- set_temp=100;
- beep=0;
- delay(1000);
- beep=1;
- }
- }while(s3==0);
- }
- if(s2==0)//ДЫМќАДЯТЩшЖЈЮТЖШМѕ1
- {
- delay(10);
- if(s2==0)
- {
- flag1=0;
- set_temp--;
- if(set_temp==0)
- {
- set_temp=0;
- beep=0;
- delay(1000);
- beep=1;
- }
- }while(s2==0);
- }
- if(s1==0)//ШЗЖЈМгШШзДЬЌЃЈМгШШгыВЛМгШШЃЉ
- {
- delay(10);
- if(s1==0)
- {
- flag1=1;
- }
- while(s1==0);
- }
- }
- /******************************************
- DS18B20ЮТЖШВЩМЏФЃПщГЬађЩшМЦ
- ЭЈЙ§DS18B20ЪЕЪБВЩМЏЫЎЮТЃЌЗДгГИјЕЅЦЌЛњЯЕЭГ
- ******************************************/
- void dsreset()//DS18B20ИДЮЛКЏЪ§
- {
- uint i;
- ds=0;
- i=103;
- while(i>0)i--;
- ds=1;
- i=4;
- while(i>0)i--;
- }
- bit tempreadbit()//ДгDS18B20 RAMЖСвЛЮЛЪ§Он
- {
- uint i;
- bit dat;
- ds=0;i++;
- ds=1;i++;i++;
- dat=ds;
- i=8;while(i>0)i--;
- return(dat);
- }
- uchar tempread()//ДгDS18B20 RAMЖСвЛзжНкЪ§Он
- {
- uchar i,j,dat;
- dat=0;
- for(i=1;i<=8;i++)
- {
- j=tempreadbit();
- dat=(j<<7)|(dat>>1);
- }
- return(dat);
- }
- void tempwritebyte(uchar dat)//ЯђDS18B20аДвдзжНкЕФЪ§Он
- {
- uint i,j;
- bit testb;
- for(j=1;j<=8;j++)
- {
- testb=dat&0x01;
- dat=dat>>1;
- if(testb)//аД1
- {
- ds=0;
- i++;i++;
- ds=1;
- i=8;while(i>0)i--;
- }
- else//аД0
- {
- ds=0;
- i=8;while(i>0)i--;
- ds=1;
- i++;i++;
- }
- }
- }
- /*void readrom()
- {
- dsreset();
- delay(1);
- tempwritebyte(0x33);
- tempwritebyte(0xbe);
- readrom=tempread();
- }
- void matchrom()
- {
- dsreset();
- delay(1);
- tempwritebyte(0x55);
- }*/
- void tempchange()//ЦєЖЏЮТЖШзЊЛЛ
- {
- dsreset();
- delay(1);
- tempwritebyte(0xcc);
- tempwritebyte(0x44);
- }
- float get_temp()//ЮТЖШжЕЖСШЁгыДІРэКЏЪ§
- {
- uchar a,b;
- dsreset();
- delay(1);
- tempwritebyte(0xcc);
- tempwritebyte(0xbe);
- a=tempread();
- b=tempread();
- temp=b;
- temp<<=8;
- temp=temp|a;
- f_temp=(float)(temp*0.0625);
- f_temp=f_temp*10;
- return(f_temp);
- }
- /**********************************************
- 12864ЯдЪОФЃПщ
- ЯдЪОЪЕМЪЮТЖШжЦКЭЩшЖЈЮТЖШжЕ
- **********************************************/
- void write_com(uchar com)//Яђ12864аДжИСю
- {
- rs=0;
- wr=0;
- delay(1);
- P0=com;
- lcden=1;
- delay(1);
- lcden=0;
- delay(1);
- }
- void write_date(uchar date)//Яђ12864аДЪ§Он
- {
- rs=1;
- wr=0;
- delay(1);
- P0=date;
- lcden=1;
- delay(1);
- lcden=0;
- delay(1);
- }
- void display(float m,uchar n)//ЯдЪОЩшЖЈЮТЖШЁЂЪЕВтЮТЖШЁЂМгШШзДЬЌ
- {
- uint i,j;
- float b;
- float p;
- uchar a1,a2,a3;
- uchar b1,b2,b3,b4;
- if(n<100)
- {
- a1=0;
- a2=n/10;
- a3=n%10;
- }
- else
- {
- a1=1;
- a2=0;
- a3=0;
- }
- p=m;
- j=(uint)(p*10);
- b1=(uchar)(j/1000);
- b2=(uchar)(j%1000/100);
- b3=(uchar)(j%100/10);
- b4=(uchar)(j%10);
- write_com(0x90+5);//ЯдЪОЩшЖЈЮТЖШ
- write_date(0x30+a1);
- write_date(0x30+a2);
- write_date(0x30+a3);
- write_com(0x88+5);//ЯдЪОЪЕВтЮТЖШ
- write_date(0x30+b1);
- write_date(0x30+b2);
- write_date(0x2e);
- write_date(0x30+b3);
- write_date(0x30+b4);
- b=((float)(b1*100+b2*10+b3))/10.0;
- i=0;
- if((b+0.2)<n)
- {
- led1=0;
- write_com(0x98+1);
- while(table2[i]!='\0')
- {
- write_date(table2[i]);
- i++;
- }
- flag2=1;
- }
- else
- {
- led1=1;
- i=0;
- write_com(0x98+1);
- while(table8[i]!='\0')
- {
- write_date(table8[i]);
- i++;
- }
- i=0;
- if((b=n)||((b>n)&&((b-0.2)<=n))||((b<n)&&((b+0.2)>=n)))
- {
- led2=0;
- write_com(0x98+4);
- while(table3[i]!='\0')
- {
- write_date(table3[i]);
- i++;
- }
- }
- }
- if(flag2==1)
- {
- flag2=0;
- led2=1;
- i=0;
- write_com(0x98+4);
- while(table8[i]!='\0')
- {
- write_date(table8[i]);
- i++;
- }
- }
- }
- /*****************************************************
- PIDПижЦЫуЗЈГЬађЩшМЦ
- ЭЈЙ§PIDПижЦЫуЗЈПЩвдЪЙЪЕМЪЫЎЮТдкЩшЖЈЫЎЮТжмЮЇГЪКмаЁЗЖЮЇЕФ
- ВЈЖЏЃЌДгЖјЪЙЪЕМЪЫЎЮТжЕНгНќЩшЖЈЫЎЮТжЕ
- *****************************************************/
- void conversion()//ЖЈЪБЦї2ГѕжЕДІРэКЏЪ§
- {
- uint temp2;
- temp2=65536-PWMH*10;
- HighH=temp2/256;
- HighL=temp2%256;
- }
- void senddate(float y)
- {
- // uint i;
- if(flag==1)
- {
- ES=0;
- flag=0;
- c=0;
- TI=1;
- printf("The measured temp:%f",y);
- // SBUF=1;
- while(!TI);
- TI=0;
- ES=1;
- }
- }
- void init()//ГѕЪМЛЏКЏЪ§
- {
- uint i,j;
- TMOD=0x21;
- TH1=0xfd;
- TL1=0xfd;
- TH0=(65536-50000)/256;
- TL0=(65536-50000)%256;
- PWMH=0;
- conversion();
- TH2=(65536-50000)/256;
- TL2=(65536-50000)%256;
- rd=1;
- lcden=0;
- write_com(0x30);
- write_com(0x0c);
- write_com(0x01);
- write_com(0x90);
- while(table5[i]!='\0')//ЯЕЭГГѕЪМЛЏ
- {
- write_date(table5[i]);
- i++;
- delay(20);
- }
- for(j=0;j<=1;j++)//6ИіЕуЕФШ§ДЮбЛЗ
- {
- write_com(0x88+4);
- for(i=0;i<=5;i++)
- {
- write_date(0x2e);
- delay(200);
- }
- delay(100);
- write_com(0x88+4);
- for(i=0;i<=5;i++)
- {
- write_date(0x20);
- }
- delay(100);
- }
- i=0;
- write_com(0x80);//ЯдЪО ЫЎЮТПижЦЯЕЭГЩшМЦБъЬт
- while(table7[i]!='\0')
- {
- write_date(table7[i]);
- i++;
- }
- i=0;
- write_com(0x90);//ЯдЪО ЩшЖЈЮТЖШ
- while(table[i]!='\0')
- {
- write_date(table[i]);
- i++;
- }
- i=0;
- write_com(0x88);//ЯдЪО ЪЕВтЮТЖШ
- while(table1[i]!='\0')
- {
- write_date(table1[i]);
- i++;
- }
- // tempwritebyte(0x4e);//ЩшЖЈDS18B20ЕФЗжБцТЪЮЊ11ЮЛ
- // tempwritebyte(0x5f);
- PWM=0;
- e1=0;
- e2=0;
- e3=0;
- duk=0;
- uk=0;
- KP=20;//PIDПижЦЫуЗЈВЮЪ§
- KI=0.061;
- KD=30;
- REN=1;//ДЎПкЭЈаХЩшжУ
- SM0=0;
- SM1=1;
- ET0=1;
- ET2=1;
- TR0=1;
- TR1=1;
- TR2=1;//ЦєЖЏЖЈЪБЦї2
- EA=1;
- ES=1;
- }
- void main()
- {
- init();
- while(1)
- {
- keyscan();//ЕїгУМќХЬЩЈУшКЏЪ§
- tempchange();//ЦєЖЏЮТЖШзЊЛЛ
- t=get_temp();//ЬсШЁЪЕВтЮТЖШ
- display(t,set_temp);//ЯдЪОЩшЖЈЮТЖШКЭЪЕВтЮТЖШ
- senddate(t);//ЯђЩЯЮЛЛњЗЂЫЭЪ§ОнКЏЪ§
- if((flag1==1))
- {
- if(timecount>=375)
- {
- timecount=0;
- e1=set_temp-t;
- duk=(KP*(e1-e2)+KI*e1+KD*(e1-2*e2+e3));//PIDПижЦЫуЗЈЪН
- uk=uk+duk;
- if(e1>=75)
- {
- z=4;
- }
- else if(e1>=50)
- {
- z=3;
- ЁЁЁЁЁЁЁЁ
- ЁЁЁЁЯогкБОЮФЦЊЗљ грЯТДњТыЧыДг51КкЯТдиИНМўЁЁЁЁ
ЫљгазЪСЯ51heiЬсЙЉЯТди:
 Лљгк51ЕЅЦЌЛњЕФЫЎЮТПижЦЯЕЭГ.rar
(18.56 MB, ЯТдиДЮЪ§: 916)
Лљгк51ЕЅЦЌЛњЕФЫЎЮТПижЦЯЕЭГ.rar
(18.56 MB, ЯТдиДЮЪ§: 916)
| 



 [ИДжЦСДНг]
[ИДжЦСДНг]

 ЙмРэдБQQ:125739409;ММЪѕНЛСїQQШК281945664
ЙмРэдБQQ:125739409;ММЪѕНЛСїQQШК281945664






 QQКУгбКЭШК
QQКУгбКЭШК QQПеМф
QQПеМф ЬкбЖЮЂВЉ
ЬкбЖЮЂВЉ ЬкбЖХѓгб
ЬкбЖХѓгб ЪеВи
ЪеВи ЬдЬћ
ЬдЬћ ЖЅ
ЖЅ ВШ
ВШ
