新人报到,电子设计大赛的小车的说明和控制电路
操作说明 1 线路连接 小车使用12V铅蓄电池,电池电量不足时,无法带动小车。需要进行充电,使用12V的充电器充8小时为宜。 在安装是注意接收模块的安装方向,安装如图1所示。 给发射模块供电,发射模块电路接口如图2所示。接线注意正负。供电电压(VCC)3~12V都可。 2操作步骤说明 正确连接和电源指示等正常工作后,程序复位,小车进入操作模式选择,小车的可选模式为(前进、后退、红外寻迹)。程序内部设立标志,用于统计用户所想要的模式。 K3键为确定键,每次按下操作键(K1、K2、K4)时,都需要按K3来通知微控制器当前的状态。 在小车处于运动状态时,按下K1,K2,K3中的任何一个时,都可以使小车停止运动。 K4键为模式选择键。第一次按下K4,确定后(按K3),内部程序标K4_m=1,程序进入前进模式。在此时按K1(或K2),确定后(按K3),小车进入左转前进(或右转前进)状态。 第二次按下K4,确定后(按K3),内部程序标志K4_m=2,程序进入后退模式。在此时按K1(或K2),确定后(按K3),小车进入左转后退(或右转后退)状态。 第三次按下K4,确定后(按K3),内部程序标志K4_m=3,此时,小车进入红外寻迹状态。小车的红外对管处在白色的地面上时,程序默认的是前进。处于黑色的地面上时,程序默认的是前轮左右转弯,但小车不前进。将小车放置于白色有黑线的地面上时(注意:黑线的宽度应为3~4CM为宜,不要超过红外对管的间距!),小车可以自动按照黑线前进。 第四次按下K4,确定后(按K3),内部程序标志全部复位清零。此时,小车在此进入操作模式选择。 小车上电复位后,若想直接让小车后退,操作方法如下。 按下K4,再按K3,再按K4,再按K3,连续按下之后,小车的标志K4_m=2,小车进入后退模式。 若想从现在的后退模式进入前进模式,操作方法如下。 按下K4,再按K3,再按K4,再按K3,再按K4,再按K3,此时小车的标志K4_m=1,小车进入了前进模式。按下K2,再按K3,小车开始右转前进。
智能遥控寻迹小车摘要:本小组设计小车为一款工作在51单片机下的遥控小车,用无线电遥控小车运行。小车又可以工作在自动寻迹状态,可以跟随地面上的黑线前进。当小车靠近障碍物时,小车会自动避障。本作品适合单片机初学者了解和学习单片机,也适合机器人爱好者了解智能控制的基础教材。 1系统简介 1.1系统方案 根据课题的设计要求,本方案主要由电源模块、微控制模块、寻迹模块、电机驱动模块、发射模块和接收模块组成。系统框图如图3所示。 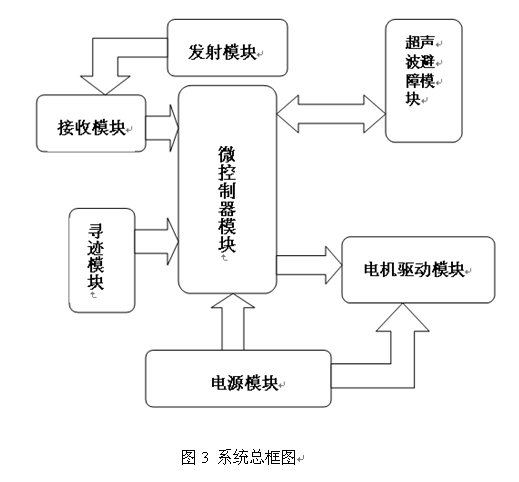
为了较好的实现各个模块的功能,我们做了如下的论证。 1.1.1小车车体的选择 第一种方案是自己用覆铜板和电机自制一个两电机小车,前轮使用步进电机做转向,后轮用直流电机做动力。第二种方案也是制作一个小车,不过小车前面使用万用导向轮做转向,小车后面用两个直流电机做转向控制,通过调节两个电机的转速,调节小车的速度和转向。这两种方案中心都是自制一个小车,考虑到传动装置的缺乏和购买传动装置的费用较高,而且组装出来的装置传动效果可能不太理想,就放弃了自制小车的两个方案。 第三种方案是购买成品小车,由于得到老师提供的一款玩具小车的底座,通过分析该小车的转向角和带负载能力,都可以满足本系统的要求。试验时,在小车上放置四块较大覆铜板,小车的速度还需要通过PWM降速,使其速度满足红外寻迹的要求。所以最后选择了该方案。 1.1.2驱动电机电路的选择 所选的小车底座有两个直流电机。单片机的驱动能力无法直接驱动直流电机,所以要使用电机驱动电路。第一种方案是,选用H桥驱动两个直流电机。H桥驱动电路电路比较复杂,并且是单片机直接控制,电路的性能无法保证。最后不做考虑。 第二种方案是用驱动芯片驱动电机。驱动芯片可以减少电路的复杂度,使电路美观,且效率较高。通过考虑各种驱动芯片的性能和我校实验室的现有资源,选择了L298N驱动芯片,它可以驱动两个直流电机,并对两个直流电机进行PWM调速。在设计电路时,使用现在比较流行的光耦隔离电路,将单片机控制电路和直流电机驱动电路隔离。 第一种方案是选用多块串联的可充电锂电池。但是由于锂电池的重量较轻,需对电机进行过大的PWM调速,使得电机的驱动力大大下降。其次是电池的价格较高,于是便放弃此方案。 第二种方案是使用12V的铅蓄电池,第一考虑的就是小车的带负载能力,通过试验得知,小车带同样重量的负载时,还需要进行PWM调速,速度才可以满足要求。通过调整重心的位置,使重心后移,小车可以自由的进行转向,从而对自动寻迹的转向没有任何影响,最后便选择了该方案。 1.1.4寻迹模块的选择 第一种方案是选择精准度较高的红外探测传感器,但是考虑到价格和小车的带负载能力,放弃了这个方案。 第二种方案是使用红外对管,特点是价格低,质量轻,对小车的转向不会造成影响。在使用时,测试的效果不够理想,检测的灵敏度非常低,不能够满足自动寻迹的要求。在后来的实验中,在每个红外对管的外面套上热缩管,减少外界光线对红外对管的干扰,使得红外对管的检测灵敏度大大提高,达到了寻迹检测的要求,所以最后选择了该方案。 1.1.5遥控模块的选择 第一种方案是红外遥控。红外遥控的电路比较简单,实现起来比较方便。但是红外遥控的弊端是容易受到外界光线的干扰,并且红外遥控必须使遥控端和被遥控端相对且处于接近一条直线上,这样根本不能实现对小车的全方位遥控。所以最后放弃了这个不太合理的方案。 第二种方案是使用无线电遥控。一般的无线电电路制作出来之后的效果太理想,为了保证遥控的效果,选择了集成的无线电模块电路(315M发射和接收模块)。为方便对无线电的控制,最后选择了PT2262-L4芯片和PT2272芯片来实现编码。 1.1.6智能遥控寻迹小车的最终方案 1)车体为成品玩具车的底座,包括两个直流电机。 - 电机驱动电路选择为光耦隔离的L298N驱动电路。
- 电源选择12V的铅蓄电池。
- 智能寻迹模块选用红外对管。
- 使用编码芯片通过无线电发射接收模块进行遥控。
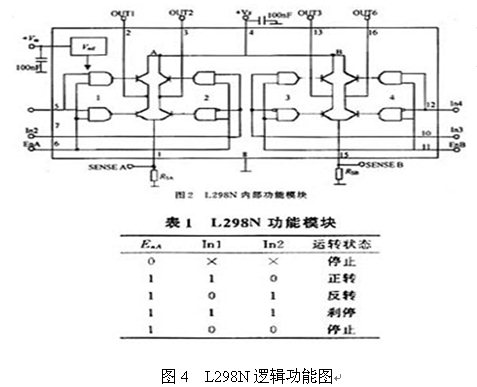
1.2硬件系统设计 1.2.1电机驱动模块 驱动芯片使用的是SGS公司的产品LM298N,15脚Multiwatt封装的。内部同样包含4通道逻辑驱动电路。可以方便的驱动两个直流电机。其驱动直流电机电路的优点是电路简单可靠,输出电压最高可达50V,可以直接通过电源来调节输出电压,带上TLP521光耦后,有利于单片机的控制。 L298N可接受标准TTL逻辑电平信号VSS,VSS可接4.5~7 V电压。4脚接电源电压,电压范围VIH为+2.5~46 V。输出电流可达2.5 A,可驱动电感性负载。L298可驱动2个直流电动机,在本模块中,我们把OUT1,OUT2和OUT3,OUT4之间分别接电动机。5,7,10,12脚接输入控制电平,控制电机的正反转。6(EnA),11(EnB)脚分别接PWM控制端,调节电机的转速。 图4为L298N的功能逻辑图,图5为电机控制电路原理图,其中1,15脚为输出电流反馈引脚,通常在使用中可以直接接地。 1.2.2寻迹模块电路 本模块选用的器件是比较便宜的红外对管,通过电位器调节红外发射管的功率,将红外线发射出去,接收管接收经过地面反射回来的红外线,由于黑色会吸收较多的红外线,从而使接收管接收到的红外线减少,使接受管输出端产生电平信号的变化。为了消除红外对管的抖动,在电路图中加入史密斯触发器来稳定信号,选用的集成芯片是74LS14,其内部逻辑图如图6所示。 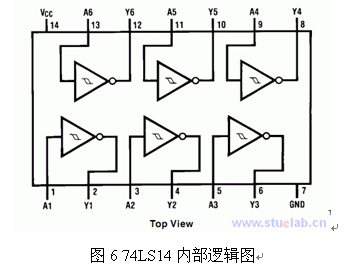
红外寻迹电路原理图如图7所示。 
在红外对管的外面加设热缩管,大大提高了红外对管的灵敏度,实物图如图8所示。 
1.2.3无线电遥控模块 为了保证无线电遥控的效果和稳定性,选择了现在比较流行的315M无线发射和接收模块,发射模块如图9所示,接收模块如图10所示。 

使用编码芯片可以提高信号的稳定性和正确性,保证遥控时不会出错。使用的芯片是PT2262-L4引脚图如图11所示,PT2272引脚图如图12所示。 

该芯片的优点是可以把电压加到12V来增大发射模块的功率,从而增大了发射接收的距离,增强了该模块的实用性。发射模块电路图如图13所示,接收模块电路图如图14所示。 

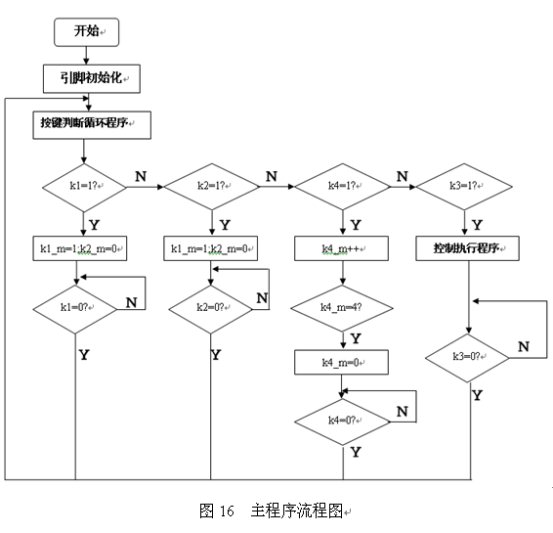
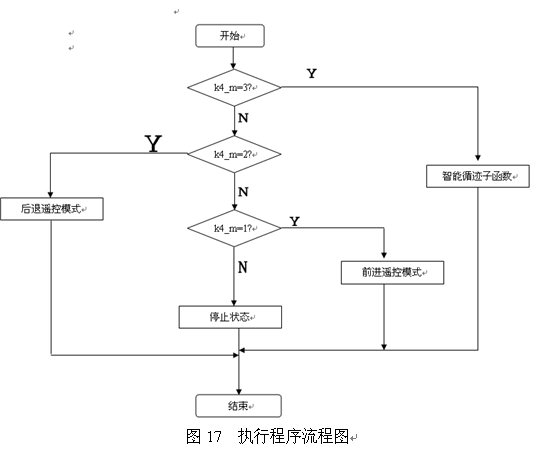
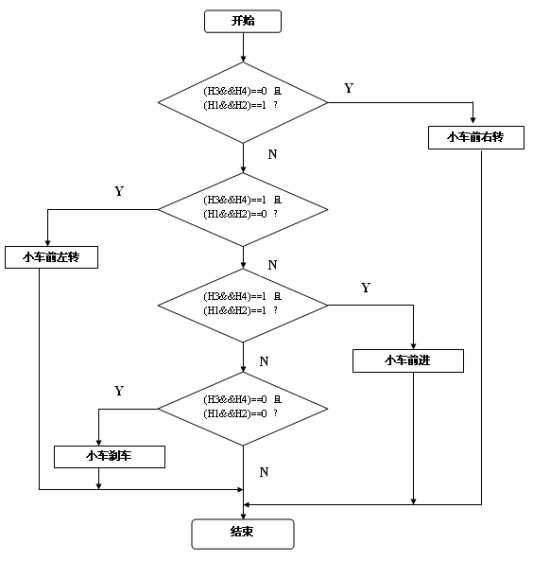
制作后的发射模块实物为图15所示。 1.2.5软件流程图 主程序程序流程图如图16所示。执行部分流程图如图17所示。智能寻迹子函数流程图如图18所示。 图18 智能寻迹子函数流程图 2 特色列举 本设计选用的集成元件L298N,PT2262,PT2272等,简化了硬件设计,缩小了硬件空间,提高了系统稳定性,软件设计使用PWM调制技术,在实现原有功能的基础上,减小了电功率,更加节能。系统设计时,基本上都使用现在比较通用的电路模块和集成芯片,利于系统的维护。设计选用的器材实用性强,价格较合理,成本适中。本系统小车是智能和人工控制并存,适合单片机初学者的制作与学习。 3系统使用范围 本系统可作为单片机初学者对单片机功能的了解及进一步学习的实训教材,提高他们学习单片机的兴趣和动手能力;也可开发汽车的自动避障功能,提高道路安全的模拟实验;部分功能模块,可应用于工厂的自动控制,例如无线遥控机器设备、工业产品的自动往返运输。系统的自动寻迹为智能模块,也可作为机器人爱好者的学习基础材料。 机会!

全部资料51hei下载地址:
 电子设计2.zip
(85.5 KB, 下载次数: 54)
电子设计2.zip
(85.5 KB, 下载次数: 54)
 电子大赛小车.doc
(1.17 MB, 下载次数: 37)
电子大赛小车.doc
(1.17 MB, 下载次数: 37)
| 



 [复制链接]
[复制链接]







 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩



