|
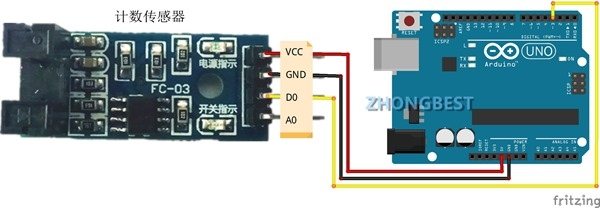
计数传感器 Arduino VCC 5V GND GND OUT D3 ==接线示意图== ==例子程序== Int speedPin=3;//定义数字3接口
int cntValue=0; void setup ()
{
pinMode(speedPin,INPUT);//3号数字口设置为输入状态 Serial.begin(9600); Serial.println("Speed Count\n"); } void loop()
{ //判断是否被遮挡 if(digitalRead(speedPin)==0) {cntValue++;//计数增加 Serial.println(cntValue);//串口输出计数值 while(digitalRead(speedPin)==0);//等待遮挡结束 } } ==程序效果== 通过遮挡槽型光耦传感器,不断计数。 U型测速模块的使用
今天做了一个电机测速实验!实验元件: U型测速模块 TT马达和测速码盘 标准电源(3V和6V)
使用了淘宝上很便宜的TT马达,下图为TT马达的几个基本参数: 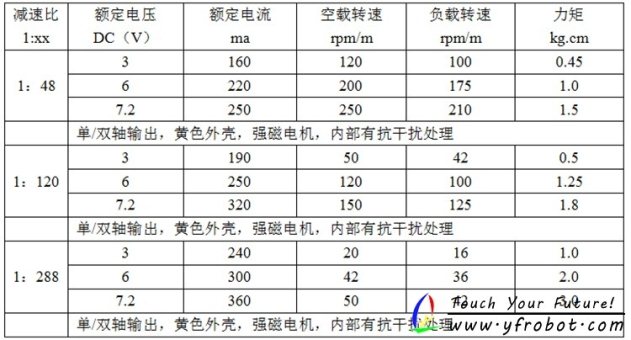 我本次使用的是1:48的减速比电机,其他两个都没有测试~~~ 我本次使用的是1:48的减速比电机,其他两个都没有测试~~~
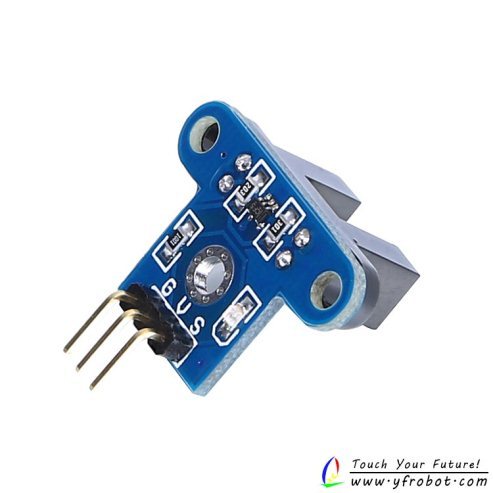
下面是U型测速模块图片:
电路:(电路图就不画了,接线很简单)
将上面的U型测速模块接好,G接GND、V接5V、S接数字引脚2或者3(使用中断,只能接这两个脚),
然后将码盘和TT马达安装在一起,就可以试验了。
接好后,用一个遮挡物放在U型开关之间,模块上的LED点亮,无遮挡物时,LED不亮;
利用这一原理,当信号输出变化一次就计数一次,再经过一些列的换算就可以得到转速了~~
下面我们看下程序,将其复制到Arduino IDE中,烧写入UNO中:/*********************************************************************** * 电机测速 * 使用millis()函数,记录时间,单位为毫秒 * 使用中断函数,当引脚电平改变时触发,计数一次 * 以1:48减速电机、20孔的码盘为例 * 将得到的值Val除以40,得到转动圈数 * 除以当时的时间,因为时间单位为毫秒,除以60000转换为分 * 这时候得到电机转速Speed ,单位 转/分 * 注意;测出来的值会有些误差,比实际值大,是因为码盘与电机轴有一定距离 * BY YFROBOT ************************************************************************/ //设置模块引脚接到数字引脚2(程序用到中断函数,UNO中断引脚为数字引脚2和3) int U_Pin = 2; float Val = 0; //设置变量Val,计数 float time; //设置变量time,计时 float Speed; //设置变量Speed,存储转速 void setup(){ Serial.begin(9600); attachInterrupt(0,count,CHANGE); //引脚电平发生改变时触发 } void loop(){ time = millis(); Speed = (Val/40)/(time/60000) ; Serial.println(Speed); } void count(){ Val += 1; } 接上电源,测试结果结果如下(3V与6V,单位为转/分):
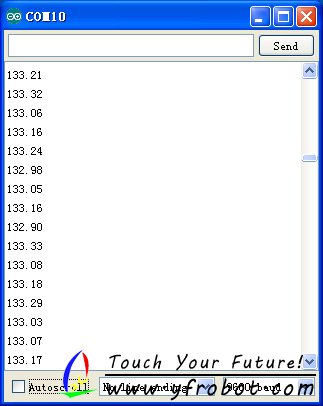 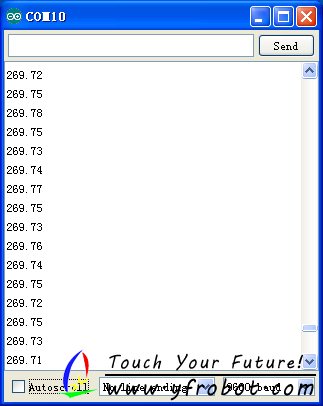
测试结果与上面的表中有些误差,这是因为码盘有直径,测试结果是码盘的转速,你也可以将结果再换算下,应该就可以得到电机的转速了~~~

全部资料51hei下载地址:
 智能小车测速模块 码盘计数 测速传感器模块 送测试程序.rar
(1.97 MB, 下载次数: 85)
智能小车测速模块 码盘计数 测速传感器模块 送测试程序.rar
(1.97 MB, 下载次数: 85)
| 



 [复制链接]
[复制链接]





 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

