|
NRF24L01无线模块简介
NRF24L01 无线模块,采用的芯片是 NRF24L01,该芯片的主要特点如下: 1)2.4G 全球开放的 ISM 频段,免许可证使用。 2)最高工作速率 2Mbps,高校的 GFSK 调制,抗干扰能力强。 3)125 个可选的频道,满足多点通信和调频通信的需要。 4)内置 CRC 检错和点对多点的通信地址控制。 5)低工作电压(1.9-3.6V)。 6)可设置自动应答,确保数据可靠传输。 
该芯片通过 SPI 与外部 MCU 通信,最大的 SPI 速度可以达到 10Mhz,所 以在后面软件编程的时候 SPI 速度不能高于这个最大值。本章我们用到的模块是 深圳云佳科技生产的 NRF24L01,该模块已经被很多公司大量使用,成熟度和稳 定性都是相当不错的。该模块的外形和引脚图如图 1.1.1 所示:
图 1.1.1 NRF24L01 模块外观引脚图 模块 VCC 脚的电压范围为 1.9-3.6V,建议不要超过 3.6V,否则可能烧坏 模块,一般用 3.3V 电压比较合适。除了 VCC 和 GND 脚,其他引脚都可以和 5V 单片机的 IO 口直连,正是因为其兼容 5V 单片机的 IO,故使用上具有很大优 势。关于 NRF24L01 的详细介绍,请参考 NRF24L01 的技术手册。
1.2硬件设计
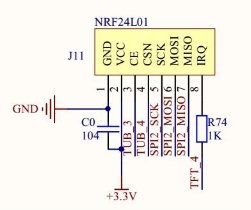
本实验功能简介:开机时系统先检测 NRF24L01 模块是否存在,在检测到 NRF24L01 模块之后,根据 K_UP 和 K_DOWN 按键来决定模块的工作模式,在设 定好工作模式之后,就会开发发送/接收数据,同样用 D1 指示灯来指示程序正 在运行。 开发板上并没有集成 NRF24L01 无线模块,而是预留了一个模块接口,所以我 们需要知道模块接口与开发板对应的管脚原理图,如图1.2.1 所示:
图 1.2.1 NRF24L01 模块接口与开发板连接原理图 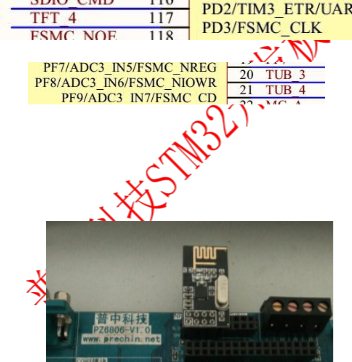 这里 NRF24L01 模块使用的是 SPI2,和我们开发板上的 FLASH 共用一个 SPI 接口,所以在使用的时候要分时复用 SPI2。本章我们需要把 FLASH EN25QXX 的 片选信号置高,以防止这个器件对 NRF24L01 的通信造成干扰。 NRF24L01 无线模块和开发板的连接实物图如图 1.2.2 所示:
图 1.2.2 NRF24L01 模块连接图 由于 2.4G 无线通信是双向的,所以至少要有两个模块同时能工作,这里我 们使用 2 套普中 STM3-PZ6806L 开发板来向大家演示。
1.3软件设计
打开“\2.4G 无线通信应用\2.4G 无线通信程序”工程,可以看到我们加入 了 nrf24l01.c 源文件和 nrf24l01.h 头文件,所有NRF24L01 相关的驱动代码和 定义都在这两个文件中实现。同时,我们还加入了之前的 spi 驱动文件 spi.c 和 spi.h 头文件,因为NRF24L01 是通过 SPI 接口通信的。
1.3.1NRF24L01驱动程序
打开 nrf24l01.c 文件,代码如下:- #include "nrf24l01.h"
- #include "spi.h"
-
-
-
- const u8 TX_ADDRESS[TX_ADR_WIDTH]={0x34,0x43,0x10,0x10,0x01}; // 发送地址
- const u8 RX_ADDRESS[RX_ADR_WIDTH]={0x34,0x43,0x10,0x10,0x01};
-
- //初始化 24L01 的 IO 口
- void NRF24L01_Init(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure; SPI_InitTypeDef SPI_InitStructure;
-
-
- //使能 PB,F,D 端口时钟 //PF8-CE PF9-CSN PD3-IRQ RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPI
- OF|RCC_APB2Periph_GPIOD, ENABLE);
-
-
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13; //PG13 上拉 防 止 EN25X 的干扰
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 推
- 挽输出
-
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOG, &GPIO_InitStructure); //初始化指定 IO GPIO_SetBits(GPIOG,GPIO_Pin_13);//上拉
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; //PB12 上拉 防止 以太网 NSS 的干扰
- GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化指定 IO GPIO_SetBits(GPIOB,GPIO_Pin_12);//上拉
-
-
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_8; //PF8 9 推 挽
- GPIO_Init(GPIOF, &GPIO_InitStructure);//初始化指定 IO GPIO_ResetBits(GPIOF,GPIO_Pin_9|GPIO_Pin_8);//PF6,7,8 下拉
-
-
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PD3 输入
- GPIO_Init(GPIOD, &GPIO_InitStructure); GPIO_ResetBits(GPIOD,GPIO_Pin_3);//PD3 下拉
-
-
- SPI2_Init(); //初始化 SPI SPI_Cmd(SPI2, DISABLE); // SPI 外设不使能
-
-
- SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //SPI 设置为双线双向全双工
- SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //SPI 主机 SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //发送
- 接收 8 位帧结构
- SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //时钟悬空低 SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //数据捕获于第 1
- 个时钟沿
- SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS 信号由 软件
- 控制
- SPI_InitStructure.SPI_BaudRatePrescaler =
- SPI_BaudRatePrescaler_16; //定义波特率预分频的值:波特率预分频值 为 16
- SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; // 数 据 传 输从 MSB 位开始
- SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC 值计算的多项式 SPI_Init(SPI2, &SPI_InitStructure); //根据 SPI_InitStruct 中指
- 定的参数初始化外设 SPIx 寄存器
- SPI_Cmd(SPI2, ENABLE); //使能 SPI 外设
-
-
- NRF24L01_CE=0; //使能 24L01
- NRF24L01_CSN=1; //SPI 片选取消
- }
-
-
- //检测 24L01 是否存在
- //返回值:0,成功;1,失败
- u8 NRF24L01_Check(void)
- {
- u8 buf[5]={0XA5,0XA5,0XA5,0XA5,0XA5};
- u8 i;
- SPI2_SetSpeed(SPI_BaudRatePrescaler_4); //spi 速度为 9Mhz(24L01 的最大 SPI 时钟为 10Mhz)
- NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR,buf,5);//写入 5 个字节 的地址.
- NRF24L01_Read_Buf(TX_ADDR,buf,5); //读出写入的地址
- for(i=0;i<5;i++)if(buf[i]!=0XA5)break;
-
- if(i!=5)return 1;//检测 24L01 错误
- return 0; //检测到 24L01
- }
-
-
- //SPI 写寄存器
- //reg:指定寄存器地址
- //value:写入的值
- u8 NRF24L01_Write_Reg(u8 reg,u8 value)
- {
- u8 status;
- NRF24L01_CSN=0; //使能 SPI 传输 status =SPI2_ReadWriteByte(reg);//发送寄存器号 SPI2_ReadWriteByte(value); //写入寄存器的值 NRF24L01_CSN=1; //禁止 SPI 传输 return(status); //返回状态值
- }
-
-
- //读取 SPI 寄存器值
- //reg:要读的寄存器
- u8 NRF24L01_Read_Reg(u8 reg)
- {
- u8 reg_val;
- NRF24L01_CSN = 0; //使能 SPI 传输 SPI2_ReadWriteByte(reg); //发送寄存器号 reg_val=SPI2_ReadWriteByte(0XFF);//读取寄存器内容 NRF24L01_CSN = 1; //禁止 SPI 传输 return(reg_val); //返回状态值
- }
-
-
- //在指定位置读出指定长度的数据
- //reg:寄存器(位置)
- //*pBuf:数据指针
- //len:数据长度
- //返回值,此次读到的状态寄存器值
- u8 NRF24L01_Read_Buf(u8 reg,u8 *pBuf,u8 len)
- {
- u8 status,u8_ctr;
- NRF24L01_CSN = 0; //使能 SPI 传输
- status=SPI2_ReadWriteByte(reg);//发送寄存器值(位置),并读取状态 值
-
- for(u8_ctr=0;u8_ctr<len;u8_ctr++)pBuf[u8_ctr]=SPI2_ReadWriteByte(
- 0XFF);//读出数据
- NRF24L01_CSN=1; //关闭 SPI 传输
- return status; //返回读到的状态值
- }
-
- //在指定位置写指定长度的数据
- //reg:寄存器(位置)
- //*pBuf:数据指针
- //len:数据长度
- //返回值,此次读到的状态寄存器值
- u8 NRF24L01_Write_Buf(u8 reg, u8 *pBuf, u8 len)
- {
- u8 status,u8_ctr;
- NRF24L01_CSN = 0; //使能 SPI 传输
- status = SPI2_ReadWriteByte(reg);//发送寄存器值(位置),并读取状 态值
- for(u8_ctr=0; u8_ctr<len; u8_ctr++)SPI2_ReadWriteByte(*pBuf++);
- //写入数据
- NRF24L01_CSN = 1; //关闭 SPI 传输
- return status; //返回读到的状态值
- }
-
- //启动 NRF24L01 发送一次数据
- //txbuf:待发送数据首地址
- //返回值:发送完成状况
- u8 NRF24L01_TxPacket(u8 *txbuf)
- {
- u8 sta;
- SPI2_SetSpeed(SPI_BaudRatePrescaler_4);//spi 速度为 9Mhz(24L01 的最大 SPI 时钟为 10Mhz)
- NRF24L01_CE=0; NRF24L01_Write_Buf(WR_TX_PLOAD,txbuf,TX_PLOAD_WIDTH);// 写 数 据
- 到 TX BUF 32 个字节 NRF24L01_CE=1;//启动发送 while(NRF24L01_IRQ!=0);//等待发送完成 sta=NRF24L01_Read_Reg(STATUS); //读取状态寄存器的值
- NRF24L01_Write_Reg(NRF_WRITE_REG+STATUS,sta); // 清 除 TX_DS 或 MAX_RT 中断标志
- if(sta&MAX_TX)//达到最大重发次数
- {
- NRF24L01_Write_Reg(FLUSH_TX,0xff);//清除 TX FIFO 寄存器
- return MAX_TX;
- }
- if(sta&TX_OK)//发送完成
- {
- return TX_OK;
- }
- return 0xff;//其他原因发送失败
- }
-
-
- //启动 NRF24L01 发送一次数据
- //txbuf:待发送数据首地址
- //返回值:0,接收完成;其他,错误代码
- u8 NRF24L01_RxPacket(u8 *rxbuf)
- {
- u8 sta;
- SPI2_SetSpeed(SPI_BaudRatePrescaler_8); //spi 速度为 9Mhz(24L01 的最大 SPI 时钟为 10Mhz)
- sta=NRF24L01_Read_Reg(STATUS); //读取状态寄存器的值 NRF24L01_Write_Reg(NRF_WRITE_REG+STATUS,sta); // 清 除 TX_DS 或
- MAX_RT 中断标志
- if(sta&RX_OK)//接收到数据
- {
- NRF24L01_Read_Buf(RD_RX_PLOAD,rxbuf,RX_PLOAD_WIDTH);// 读 取 数据
- NRF24L01_Write_Reg(FLUSH_RX,0xff);//清除 RX FIFO 寄存器
- return 0;
- }
- return 1;//没收到任何数据
- }
-
-
- //该函数初始化 NRF24L01 到 RX 模式
- //设置 RX 地址,写 RX 数据宽度,选择 RF 频道,波特率和 LNA HCURR
- //当 CE 变高后,即进入 RX 模式,并可以接收数据了
- void NRF24L01_RX_Mode(void)
- {
- NRF24L01_CE=0;
-
-
- NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(u8*)RX_ADDRESS,RX_AD R_WIDTH);//写 RX 节点地址
-
-
- NRF24L01_Write_Reg(NRF_WRITE_REG+EN_AA,0x01); //使能通道 0 的自动应答
- NRF24L01_Write_Reg(NRF_WRITE_REG+EN_RXADDR,0x01);// 使 能 通 道 0 的接收地址
- NRF24L01_Write_Reg(NRF_WRITE_REG+RF_CH,40); //设置 RF 通
- 信频率
- NRF24L01_Write_Reg(NRF_WRITE_REG+RX_PW_P0,RX_PLOAD_WIDTH);//选
- 择通道 0 的有效数据宽度 NRF24L01_Write_Reg(NRF_WRITE_REG+RF_SETUP,0x0f);//设置 TX 发射
- 参数,0db 增益,2Mbps,低噪声增益开启
- NRF24L01_Write_Reg(NRF_WRITE_REG+CONFIG, 0x0f);//配置基本工作 模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式
- NRF24L01_CE = 1; //CE 为高,进入接收模式
- }
-
- //该函数初始化 NRF24L01 到 TX 模式
- //设置 TX 地址,写 TX 数据宽度,设置 RX 自动应答的地址,填充 TX 发送数据, 选择 RF 频道,波特率和 LNA HCURR
- //PWR_UP,CRC 使能
- //当 CE 变高后,即进入 RX 模式,并可以接收数据了
- //CE 为高大于 10us,则启动发送. void NRF24L01_TX_Mode(void)
- {
- NRF24L01_CE=0;
-
-
- NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR,(u8*)TX_ADDRESS,TX_ADR_W IDTH);//写 TX 节点地址
-
-
- NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(u8*)RX_ADDRESS,RX_AD R_WIDTH); //设置 TX 节点地址,主要为了使能 ACK
-
-
- NRF24L01_Write_Reg(NRF_WRITE_REG+EN_AA,0x01); //使能通道 0 的自动应答
- NRF24L01_Write_Reg(NRF_WRITE_REG+EN_RXADDR,0x01); //使能通道 0 的接收地址
- NRF24L01_Write_Reg(NRF_WRITE_REG+SETUP_RETR,0x1a);//设置自动重 发间隔时间:500us + 86us;最大自动重发次数:10 次
- NRF24L01_Write_Reg(NRF_WRITE_REG+RF_CH,40); //设置 RF 通
- 道为 40
- NRF24L01_Write_Reg(NRF_WRITE_REG+RF_SETUP,0x0f); //设置 TX 发
- 射参数,0db 增益,2Mbps,低噪声增益开启 NRF24L01_Write_Reg(NRF_WRITE_REG+CONFIG,0x0e); //配置基本工
- 作模式的参数;PWR_UP,EN_CRC,16BIT_CRC,接收模式,开启所有中断 NRF24L01_CE=1;//CE 为高,10us 后启动发送
- }
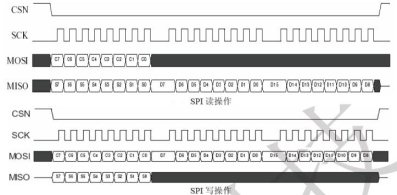
此部分代码我们不多介绍,程序内有详细的注释,在这里强调一个要注意的 地方,在 NRF24L01_Init 函数里面,我们调用了 SPI2_Init()函数,该函数我 们在 FLASH 实验中讲到过,当时我们把 SPI 的 SCK 设置为空闲时为高,但是 NRF24L01 的 SPI 通信时序如图 1.3.1 所示:
图 1.3.1 NRF24L01 SPI 通信时序图 从图中可以看出,SCK 空闲的时候是低电平的,而数据在 SCK 的上升沿被 读写。所以,我们需要设置 SPI 的 CPOL 和 CPHA 均为 0,来满足 NRF24L01 对 SPI 操作的要求。所以,我们在 NRF24L01_Init 函数里面又单独添加了将 CPOL 和 CPHA 设置为 0 的代码。 接下来我们看看 nrf24l01.h 代码,该头文件主要定义了一些 NRF24L01 的 命令字以及函数声明,这里还通过 TX_PLOAD_WIDTH 和RX_PLOAD_WIDTH 决定了 发射和接收的数据宽度,也就是我们每次发射和接受的有效字节数。 NRF24L01 每次最多传输 32 个字节,再多的字节传输则需要多次传送。
1.3.2 主函数
打开 main.c,代码如下:- /* 下载程序后,首先要按下按键 K_UP 或者 K_DOWN,按键 K_UP 是接收, K_DOWN 是发送,两块开发板
- 只能一个作为发送一个作为接收,否则两个都为接收或者发送将进入死 循环。接收的时候
- 指示灯闪烁 NRF24L01 的最大 SPI 时钟为 10Mhz 因此在设定 SPI 时钟的 时候要低于 10M*/
-
- #include "system.h"
- #include "SysTick.h"
- #include "led.h"
- #include "usart.h"
- #include "tftlcd.h"
- #include "key.h"
- #include "nrf24l01.h"
-
-
-
- void data_pros() //数据处理函数
- {
- u8 key;
- static u8 mode=2; //模式选择
- u8 rx_buf[33]="www点prechincn";
- static u16 t=0;
- while(1) //等待按键按下进行选择发送还是接收
- {
- key=KEY_Scan(0);
- if(key==KEY_UP) //接收模式
- {
- mode=0;
-
- LCD_ShowString(10,140,tftlcd_data.width,tftlcd_data.height,16,"RX
- _Mode");
-
-
- LCD_ShowString(10,160,tftlcd_data.width,tftlcd_data.height,16,"Re ceived Data:");
-
-
-
- ");
- LCD_ShowString(120,160,tftlcd_data.width,tftlcd_data.height,16,"
-
- break;
- }
- if(key==KEY_DOWN) //发送模式
- {
- mode=1;
-
- LCD_ShowString(10,140,tftlcd_data.width,tftlcd_data.height,16,"TX
- _Mode");
-
-
- LCD_ShowString(10,160,tftlcd_data.width,tftlcd_data.height,16,"Se nd Data: ");
-
-
- ");
- LCD_ShowString(120,160,tftlcd_data.width,tftlcd_data.height,16,"
-
- break;
- }
- }
-
- if(mode==0) //接收模式
- {
- NRF24L01_RX_Mode();
- while(1)
- {
- if(NRF24L01_RxPacket(rx_buf)==0) //接收到数据显示
- {
- rx_buf[32]='\0';
-
- LCD_ShowString(120,160,tftlcd_data.width,tftlcd_data.height,16,rx
- _buf);
- break;
- }
- else
- {
- delay_ms(1);
- }
- t++;
- if(t==1000)
- {
- t=0;
- led2=~led2; //一秒钟改变一次状态
- }
- }
- }
- if(mode==1) //发送模式
- {
-
- NRF24L01_TX_Mode();
- while(1)
- {
- if(NRF24L01_TxPacket(rx_buf)==TX_OK)
- {
-
- LCD_ShowString(120,160,tftlcd_data.width,tftlcd_data.height,16,rx
- _buf);
- break;
- }
- else
- {
-
- LCD_ShowString(120,160,tftlcd_data.width,tftlcd_data.height,16,"S
- end Data Failed ");
-
-
- }
- }
- }
- }
-
-
- int main()
- {
- u8 i=0; u16 rd=0; SysTick_Init(72);
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中断优先级 分组 分 2 组
- LED_Init(); USART1_Init(9600);
- TFTLCD_Init(); //LCD 初始化 KEY_Init();
- NRF24L01_Init();
-
-
-
- FRONT_COLOR=BLACK; LCD_ShowString(10,10,tftlcd_data.width,tftlcd_data.height,16,"
- PRECHIN STM32F1"); LCD_ShowString(10,30,tftlcd_data.width,tftlcd_data.height,16,"
- www点prechin点net"); LCD_ShowString(10,50,tftlcd_data.width,tftlcd_data.height,16,"
- NRF24L01 Test"); LCD_ShowString(10,70,tftlcd_data.width,tftlcd_data.height,16,"
- K_UP:RX_Mode K_DOWN:TX_Mode"); FRONT_COLOR=RED;
-
- while(NRF24L01_Check()) //检测 NRF24L01 是否存在
- {
-
-
- LCD_ShowString(140,50,tftlcd_data.width,tftlcd_data.height,16,"Er ror ");
- } LCD_ShowString(140,50,tftlcd_data.width,tftlcd_data.height,16,
- "Success");
-
- while(1)
- {
- data_pros(); i++; if(i%20==0)
- {
- led1=!led1;
- }
-
-
- delay_ms(10);
-
-
- }
- }
程序运行时先通过 NRF24L01_Check 函数检测 NRF24L01 是否存在,如果存 在,则让用户选择发送模式(K_DOWN)还是接收模式(K_UP),在确定模式之后,
设置 NRF24L01 的工作模式,然后执行相应的数据发送/接收处理。在测试的时 候一定要注意,两块开发板一个选择发送模式,一个选择接收模式,这样在 LCD 上才会显示发送的字符数据“www点prechin点cn”,还有要注意发送字节的长度, 在头文件内我们已经定义了最大的发送字节长度。
1.4实验现象
 将模块连接好以后,把实验程序分别下载到两块开发板内即可看到两块开发 板 LCD 显示,插上 NRF24L01 模块后,通过 K_UP 和 K_DOWN按键,设定好对应的 模式,发送端就会发送 www点prechin点cn 到接收端,同时 LCD 会显示发送与接收 的字符。如图 1.4.1 所示:

全部资料51hei下载地址:
 2.4G无线通信应用.rar
(4.26 MB, 下载次数: 643)
2.4G无线通信应用.rar
(4.26 MB, 下载次数: 643)
|




 [复制链接]
[复制链接]





 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩 正在学习ing
正在学习ing

