|
小车走跷跷板设计报告
一、设计思路: 对于题目要求,最重要的是制作对于角度的传感器。我们没有使用市场上提供的水银传感起或者更高级的角度传感器,而是利用小球及轨道自己实现了一个简易的平衡仪。 平衡仪的原理是利用小球的惯性,当小车构成某个角度的倾斜的时候,小球因为惯性达到轨道一端,再使用适当的位置传感器,转换为电信号输出给单片机。 单片机收到信号并作确认后,调动电机对小车位置进行调整。故小车在跷跷板上反复调整位置,逼近平衡点,直至轨道相对水平,即小车到达平衡点。 具体机械和传感器部分实现,可见下面小节。
二、机械部分: 机械和光电部分:这部分有2个器件,分别为小车提供平衡的信息和走直线的信息。
- 平衡仪:这是这次工作的关键部分,从设计到最后的实现花了许多时间,设计的目标是让平衡仪提供前倾、后倾、平衡3种位置信息。通过实验,推翻了2种设计方案,最后完成了平衡仪的制作。
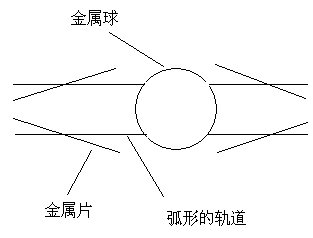
方案1:如右图所示,利用金属球使得两个金属片直接导通,再配以辅助电路实现信号的传递。经过初步的实验,这一方案就被否决掉了,原因有二:1,收到导轨的限制,小球很难同时接触到两个金属片;2,无法做到小球和金属片直接的非弹性碰撞,信号不稳定。为了解决这两个问题,我们设计了第二种方案。
方案2:轨道采用了4片金属片组成,在轨道中间部分涂上绝缘的涂层(胶水),当小球在左边或右边的时候两片金属就处于稳定的导通状态,这样就解决了方案1的两个问题。在实际制作中采用的是可乐罐的皮,最后测试时发现有严重的接触不良的问题(猜测是铝氧化层的关系,如果是铁片的话应该就可以了)。在已经有轨道的基础上,我们设计了第三种方案。
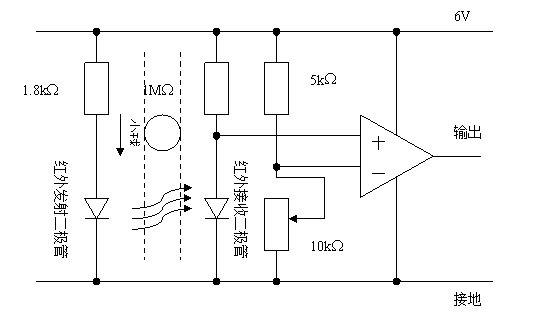
方案3:采用发光二极管和光敏二极管对来传递小球的位置信号,当小球挡住光线时,光敏二极管为高阻,没挡住时为低阻,配以判决电路完成信号的转换和传递。最后实现的是这个方案。
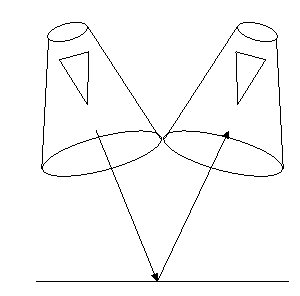 车前灯:由两组发光、光敏二极管组成,结构如右图所示,两个二极管成一定的角度以利于镜面反射光线的接收,两个灯罩隔绝自然光以及直接照射。两组灯与板上黑线配合,如果左灯照到黑线则表示车右偏,反之则左偏。根据光敏二极管阻值变化,配以判决电路完成信号的转换和传递。最后实测中发现小车的机械稳定度足够,无需车前灯校准。 车前灯:由两组发光、光敏二极管组成,结构如右图所示,两个二极管成一定的角度以利于镜面反射光线的接收,两个灯罩隔绝自然光以及直接照射。两组灯与板上黑线配合,如果左灯照到黑线则表示车右偏,反之则左偏。根据光敏二极管阻值变化,配以判决电路完成信号的转换和传递。最后实测中发现小车的机械稳定度足够,无需车前灯校准。
二、硬件部分: 本试验的硬件部分主要是三个部分: 供电部分的电源为8V,直接供给电机所需。另一部分经过分压供给光电门所需电压。
根据光电门特性,供电需要6V即可,故根据实验结果,串联发光二极管,可以分压2V。同时提供光电门供电正常指示灯。 2.光电门电路部分: 光电门部分主要电路是提供一个门限电压判决门,如果有小球经过光电门,根据电压变化输出信号,反馈单片机。 具体电路如下图所示: - 两个光电门的输出连接到单片机的P0和P1脚,如图所示:
四、程序部分: 1、对于小车走跷跷板的策略如下: 先向前开,直到过平衡点,传感器得到的状态信号发生改变。然后小车改变行进方向,改为向后开,并且速度慢。接着直到传感器状态再次改变,说明又过了平衡点,此时小车再次改变方向并减速。重复上面的过程直到小车到最低速。这部分是大致定位。 最后,小车以最低速行驶,根据传感器的状态决定行进方向,调整位置,每行进一定时间便停一下,使传感器能正确表示小车状态。经过几次调整后停下,实现精确定位。 2、小车程序的具体实现。 程序对小车马达的控制是由时间中断来实现的。小车的速度与方向的调节是由调节输出的pwm波实现。在每个时钟中断,输出pwm波控制马达,根据小车应有速度与方向决定输出pwm信号的高低,使马达在一定的时间内工作一段时间,停一段时间。 程序的传感器部分也是由时间中断实现。每隔一定时间,程序对传感器采样一次。由于传感器是机械结构,导致传感器的信号毛刺较多,故程序采用统计办法除毛刺。统计一定时间内的采样信号,突破门限值的状态即为当前状态。若没有突破门限值的状态,则保持原状态不变。 程序的策略部分在根据传感器调节速度的部分实现。通过小车所处状态来决定下面的策略,调整速度与方向。
五、作品及结果: 综合上述三个部分,我们完成小车作品。 实验结果:小车在有配重跷跷板上,几乎能够作到,一次找到平衡点。我们调整了小车精度,小车能够作到不断逼近平衡点位置。 在无配重跷跷板上,小车也能有限次寻找平衡,并在最后亮灯提示找到平衡点。
六、实验存在的问题: 1.跷跷板没有阻尼。因为跷跷板很长,所以其转动惯量特别大。在小车寻找平衡位置时,对跷跷板起力矩作用,引起跷跷板来回振荡。 因为没有阻尼,且转动惯量特别大,振荡很难停止,这个现象在加配重时尤为明显。即使小车到达平衡位置,跷跷板仍然来回谐振,造成未平衡假象,误导小车,使小车无法准确作出判断。 解决方案:最佳解决方案是为跷跷板加上阻尼。在实验室条件无法满足,我们在程序上加上了一定的保护,对这种情况加了相关判断,提示小车可以最终调整收敛到平衡点。 2.小车启动加速度。小车启动加速度很大,主要是该电机与轮子不匹配。轮子转动存在功率门限:只有达到一定功率才能启动小车。这使得小车无法慢速前进,在最后微调时,无法精确找到平衡位置。同时启动加速度恶化了跷跷板转动惯量问题,为其提供了力矩。 解决方案:使用更好的车轮,或使用履带和齿轮组替代现有车轮。限于实验室条件和时间,在本实验中没有实现。
完整的Word格式文档51黑下载地址:
 小车走跷跷板设计报告.doc
(396.5 KB, 下载次数: 8)
小车走跷跷板设计报告.doc
(396.5 KB, 下载次数: 8)
| 













 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

