Ŀ¼ 1 ����
2 ϵͳ����
2.1 ��Ʊ���
2.2 ���˼·
2.3 ϵͳ������
3 PWM�������ƶ���
3.1 PWM����ԭ��
3.2 PWM���ٷ���
3.3 PWMʵ�ַ���
4 ϵͳӲ�����
4.1 ϵͳ�������
4.1.1 Ӳ��ģ�����
4.1.1 ��Ƭ����������ģ��
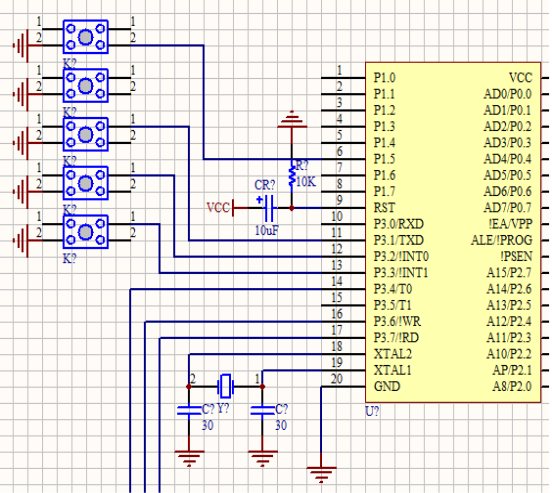
4.2 AT89S52��Ƭ�����
4.2.1 AT89S52��Ҫ����
4.2.2 AT89S52��Ҫ��������
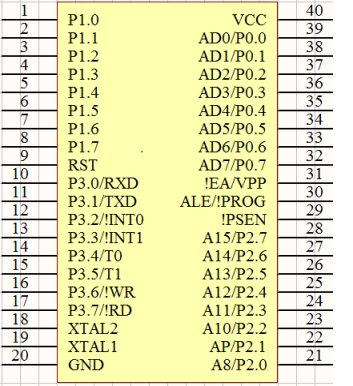
4.2.3 AT89S52�����Ź��ܽ���
4.2.4 AT89S52���ڲ���Դ
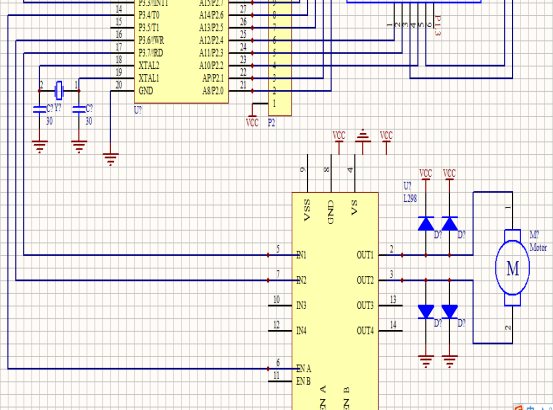
4.3 L298�������ģ��
4.3.1 L298����������
4.3.2 L298�ڲ�ԭ��ͼ
4.3.3 L298���ŷ��ż�����
4.3.4 L298������
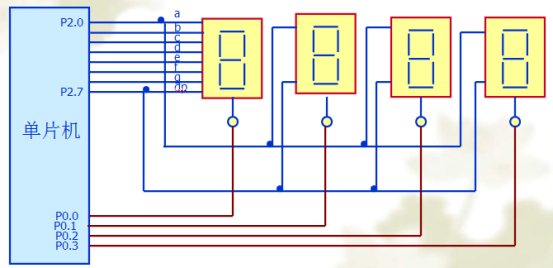
4.4 LED�������ʾ
4.4.1 LED���
4.4.2 LED�߶�����ܵĽṹ
4.4.3 �������ֺ��ַ����ֶ���
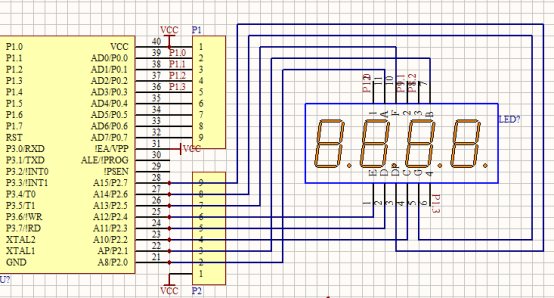
4.4.4 LED������뵥Ƭ��������
4.4.5 �ij�������
4.4.6 ��ϵͳ�е�Ƭ����LED������
4.5 ����ʽ���̿���ģ��
4.5.1 ���̵Ĺ��ܼ�����
4.5.2 ����ʽ����
4.5.3 ����ʽ�����뵥Ƭ��������
5 ϵͳ�������
����
��л
�����
��¼
��¼1
��¼2
1 ��������ֱ�������Ŀ���ϵͳ����ģ������������ɣ�����ģ������������е�ȱ�㣬�������Ư����Ư��ѹ������ϵͳ�������϶࣬ʹ��ģ��ֱ������ϵͳ�Ŀ��ƾ��ȼ��ɿ��Խϵ͡����ż�������Ƽ����ķ�չ���������Ѿ��㷺ʹ����ֱ������ϵͳ��ʵ����ȫ���ֻ����ơ������������������źŹ����������ֶ����㣬����������ǿ�����ԣ�ȫ����ֱ�����ٿ��ƾ��ȡ��ɿ��Ժ��ȶ��Ա�ģ��ֱ������ϵͳ�����ߡ����ԣ�ֱ���������Ʋ���������ʵ��ȫ���ֻ���ʹֱ������ϵͳ����һ��ո�µĽΡ� �������������ϸ�������ʮ��������ż��ɵ�·���ģ�������ģ���ɵ�·���칤�յ�Ѹ�ٷ�չ�����������Լ۱�Խ��Խ�ߡ����⣬���ڵ������Ӽ����ķ�չ���������յ�������ʹ�ô��ʵ�������������Ѹ����ߡ�Ϊ�������ձ����ڿ��Ƶ���ṩ�˿��ܣ��������������Ƶ����ɸ�����ӱ�ġ������ܵĿ��Ʋ��ԣ�ʹ����ĸ���DZ�������õ���ֵķ��ӣ�ʹ��������ܸ����Ϲ�ҵ����ʹ��Ҫ���ٽ��˵���������з��������粽���������ˢֱ����������ش���綯���ȱ��ڿ�����ʵ�õ����͵����ʹ����ķ�չ�������µı仯�� ���ڼ����������Ƶ����ֻ�����������������Ƽ̵��������ӿ���Ԫ������ʹ��·��ͨ��ضϾͿ�ʵ�ֶԵ���Ŀ��ơ����ڴ��������Ŀɱ�̿��������Ѿ��ڸ��ֵĻ����豸���ֵ�������ˮ�����ձ�õ�Ӧ�ã�ͨ���Կɱ�̿��������б�̾Ϳ���ʵ�ֶԵ���Ĺ��ɻ����ơ����ڸ��ӵ����������Ƶ��,��Ҫ�������������Ƶ���ĵ�ѹ��������ת�ء�ת�١�ת�ǵȣ�ʹ�����������ָ��ȷ������ͨ�����������ƣ���ʹ����������кܴ����ߡ�Ŀǰ���ֱ������ͽ���������Ǹ�����������ֱ������������ܺã������л�е���������л�еĥ��������⣻����������������첽�������ͬ��������ṹ����ֱ�����������Ҳ��ֱ������ɿ�������Ƶ�ʺ㶨�ĵ���������ʱ�����ǵ��ٶȲ��ܷ�������õص���[2]�������ܵ���������DSP (DIGITAL SIGNAL PROCESSOR�������źŴ�����)�ij��֣�Ϊ�����µĿ������ۺͿ��Ʋ����ṩ�����õ����ʻ�����ʹ����������Զ����̶ȴ�Ϊ��ߡ����Ƚ������ػ���������λ���ŷ�ϵͳ���Ѿ���������DSP�ȵĸ�������������ִ���ٶȿɴ�������������ÿ�룬�Ҿ����ʺϵľ������㡣 2ϵͳ���� 2��1��Ʊ��� �����������ſƼ��Ľ������������Ӽ����õ���Ѹ�ٵķ�չ��ֱ������õ���Խ��Խ�㷺��Ӧ�á�ֱ�������������ĵ�������,����ƽ��������,���ٷ�Χ��;����������,�ܳ���Ƶ���ij������,��ʵ��Ƶ�������������ƶ��ͷ�ת;��Ҫ���������������Զ���ϵͳ���ֲ�ͬ����������Ҫ�Ӷ���ֱ������ĵ�������˽ϸߵ�Ҫ�ı�����·������٣��ı�����ѹ���ٵȼ�����ԶԶ��������Ҫ����ʱͨ��PWM��ʽ����ֱ��������ٵķ���Ӧ�˶�����
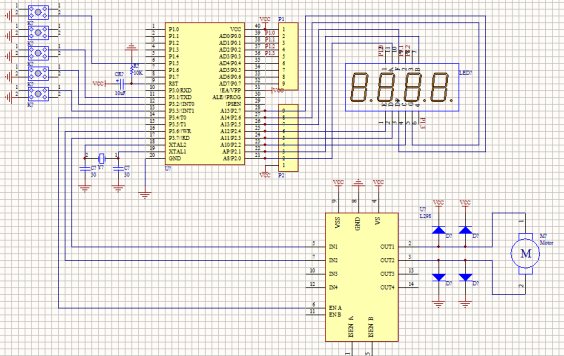
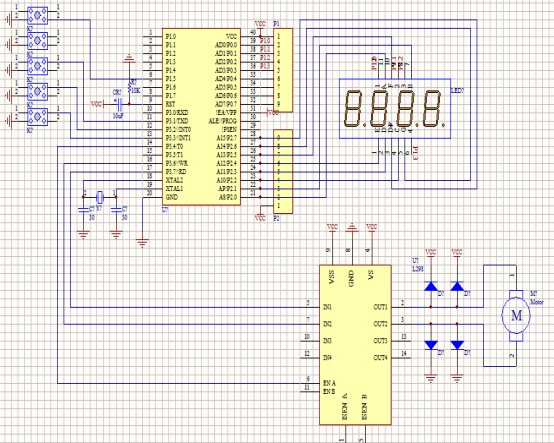
2��2 ���˼· ֱ�����PWM����ϵͳ����Ҫ���ܰ�����ʵ�ֶ�ֱ������ļ��١������Լ��������ת����ת�ͼ�ͣ�����ҿ��Ե��������ת�٣��ܹ��ܷ����ʵ�ֵ�������ܿ��ơ� �����·����ֱ�����PWM����ģ�顣�ⲿ�ֵ�·��Ҫ��AT89S52��Ƭ����I/O�˿ڡ���ʱ���������ⲿ�ж���չ�ȿ���ֱ������ļ��١������Լ��������ת�ͷ�ת�����ҿ��Ե��������ת�٣��ܹ��ܷ����ʵ�ֵ�������ܿ��ơ������ͨ��AT89S52��Ƭ�����������ɵ��������źŲ����뵽L298����оƬ������ֱ����������ġ���ֱ�����PWM����ϵͳ�����µ�·ģ����ɣ� ������벿�֣���һģ����Ҫ�����ô��жϵĶ���ʽ������ʵ�ֶ�ֱ������ļ��١������Լ��������ת����ת�ͼ�ͣ���ơ� ��ƿ��Ʋ��֣���Ҫ��AT89S52��Ƭ�����ⲿ�ж���չ��·��ɡ�ֱ�����PWM����ʵ�ֲ�����Ҫ��һЩ�����ܡ������L298ֱ���������ģ����ɡ� �����ʾ���֣� LED������ʾ���֣�ʵ�ֶ�PWM��������ռ�ձȵ�ʵʱ��ʾ��
2��3 ϵͳ������ 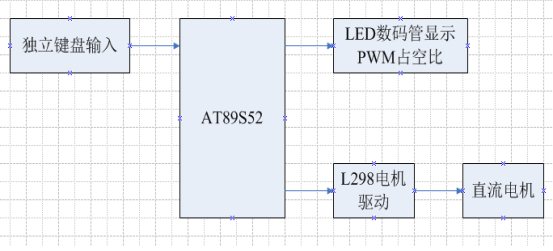
ֱ�����PWM���ٷ��� ����˵����ֱ�����PWM����ϵͳ��AT89S52��Ƭ��Ϊ���ƺ��ģ�����������ģ�顢LED��ʾģ�鼰�������ģ����ɡ����ô��жϵĶ���ʽ������Ϊ��������룬��Ƭ���ڳ�������£���ʱ���ϸ�L298ֱ���������оƬ����PWM���Σ�H��������·��ɵ��������ת�ͼ�ͣ���ƣ�ͬʱ��Ƭ����ͣ�Ľ�PWM��������ռ�ձ��͵�LED��������ʵʱ��ʾ��
3PWM��������ԭ�� 3��1PWM����ԭ�� �����˵ĵ�ѹ���Ӷ��ﵽ����Ҫ���һ�ֵ�ѹ����������PWM����Ӧ��������棬���磺�����PWM��������ȵ��ƣ���ͨ�����ƹ̶���ѹ��ֱ����Դ����Ƶ�ʣ��ı为�١��¶ȿ��ơ�ѹ�����Ƶȵ�[7]�� ��PWM�������Ƶĵ���ϵͳ�У���һ���̶���Ƶ������ͨ�ͶϿ���Դ�����Ҹ�����Ҫ�ı�һ�������ڡ���ͨ���͡��Ͽ���ʱ��ij��̡�ͨ���ı�ֱ����������ϵ�ѹ�ġ�ռ�ձȡ����ﵽ�ı�ƽ����ѹ��С��Ŀ�ģ��Ӷ������Ƶ綯����ת�١�Ҳ����Ϊ��ˣ�PWM�ֱ���Ϊ����������װ�á��� ��ͼ1��ʾ�� 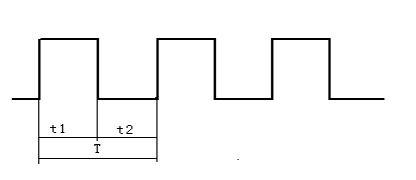
ͼ1 PWM�źŵ�ռ�ձ� ����ʼ�ս�ͨ��Դʱ�����ת�����ΪVmax����ռ�ձ�ΪD= t1 / T��������ƽ���ٶ�ΪVa = Vmax * D������Vaָ���ǵ����ƽ���ٶȣ�Vmax ��ָ�����ȫͨ��ʱ������ٶȣ�D = t1 / T��ָռ�ձȡ� ������Ĺ�ʽ�ɼ��������Ǹı�ռ�ձ�D=t1/Tʱ���Ϳ��Եõ���ͬ�ĵ��ƽ���ٶ�Vd,�Ӷ��ﵽ���ٵ�Ŀ�ġ��ϸ���˵��ƽ���ٶ�Vd��ռ�ձ�D�����ϸ�����Թ�ϵ��������һ���Ӧ���У����ǿ��Խ�����ƵĿ��������Թ�ϵ�� 3. 2 PWM���ٷ��� ���ڵ�Ƭ������������ʵ��PWM����PWM����ϵͳ��ռ�ձ�D��һ����Ҫ�����ڵ�Դ��ѹ ���������£�����˵�ѹ��ƽ��ֵȡ����ռ�ձ�D�Ĵ�С���ı�D��ֵ���Ըı����˵�ѹ��ƽ��ֵ�Ӷ��ﵽ���ٵ�Ŀ�ġ��ı�ռ�ձ�D��ֵ�����ַ����� ���������£�����˵�ѹ��ƽ��ֵȡ����ռ�ձ�D�Ĵ�С���ı�D��ֵ���Ըı����˵�ѹ��ƽ��ֵ�Ӷ��ﵽ���ٵ�Ŀ�ġ��ı�ռ�ձ�D��ֵ�����ַ����� A��������Ƶ�������� ���䣬ֻ�ı�t������ʹ����(��Ƶ��)Ҳ��֮�ı�[�� ���䣬ֻ�ı�t������ʹ����(��Ƶ��)Ҳ��֮�ı�[�� B��������Ƶ��������t���䣬ֻ�ı� ������ʹ����(��Ƶ��)Ҳ��֮�ı�[�� ������ʹ����(��Ƶ��)Ҳ��֮�ı�[�� C����Ƶ����������������T(��Ƶ��)���䣬ͬʱ�ı� ��t�� ��t�� ǰ���ַ����ڵ���ʱ�ı��˿������������(��Ƶ��)�������������Ƶ����ϵͳ�Ĺ���Ƶ�ʽӽ�ʱ��������������˳����ö�Ƶ���������ı�ռ�ձȴӶ��ı�ֱ���綯���������˵�ѹ�����õ�Ƭ���Ķ�ʱ���������������ʱ�ȷ�ʽ��ʵ�����������ɵ��������ַ�ʽ�ɼ�Ӳ����·��������ǿ���ŵ㡣 3.3 PWMʵ�ַ�ʽ ����һ�����ö�ʱ����Ϊ�������ƵĶ�ʱ��ʽ����һ��ʽ������������ȼ��侫ȷ�����ֻ�ڼ���us�� ������������������ʱ��ʽ����һ��ʽ�ھ����ϲ�������һ���ر����������жϺ���һ�������ʲ��÷���һ��
4ϵͳӲ����� 4.1ϵͳ������� 4.1.1 Ӳ��ģ����� ��1����Ƭ������ģ�� ��2��L298�������ģ�� ��3��LED��ʾģ�� ��4���������̿���ģ��3.3ϵͳӲ����ģ���· 4.1.2 ��Ƭ����������ģ�� ��Ƭ����������ģ�� �������ö�ʱ�������õ�Ƭ��P2�ڵ�P2.6��P2.7�������ռ�ձȲ�ͬ�ķ�����Ȼ������оƬL298�Ŵ�����ֱ�����������оƬ�������ѹ�������ŵĵ�ѹ��ڵ���ʱһ��������Ϊ�͵�ƽ����һ�����Ų������ٷ����������������ŵĵ�ѹ��Ϳ�ͨ����������һ�����������ơ�����Ҫ�ı���ת������ʱ���������ŵ�����෴�� ��ʱ����������ʱ�䣨1us���ж�һ�Σ���ʹP2.6��P2.7����һ���ߵ�ƽ��͵�ƽ��ֱ��������ٶȷֳ�100���ȼ������һ�����ھ���100�����壬����Ϊһ�ٸ������ʱ�䣬�ٶȵȼ���Ӧһ�����ڵĸߵ�ƽ����ĸ�����ռ�ձ�Ϊ�ߵ�ƽ�������ռһ����������������İٷ�����һ�����ڼ��ڵ�����˵ĵ�ѹΪ����ߵ�ѹ����ռ�ձȡ�ռ�ձ�Խ���ڵ�����˵ĵ�ѹԽ���ת��Խ�졣�����ƽ���ٶȵ�����һ����ռ�ձ��µ��������ٶȳ���ռ�ձȡ������Ǹı�ռ�ձ�ʱ���Ϳ��Եõ���ͬ�ĵ��ƽ���ٶȣ��Ӷ��ﵽ���ٵ�Ŀ�ġ���ȷ�Ľ���ƽ���ٶ���ռ�ձȲ������ϸ�����Թ�ϵ����һ���Ӧ���У����Խ�����ƿ������Թ�ϵ�� 4��2 AT89S52�ļ�� 4��2.1 AT89S52��Ҫ���� AT89S52��һ�ֵ��ġ�������CMOS8λ������������8K ��ϵͳ�ɱ��Flash �洢����ʹ��Atmel ��˾���ܶȷ���ʧ�Դ洢���������죬�빤ҵ80C51 ��Ʒָ���������ȫ���ݡ�Ƭ��Flash��������洢����ϵͳ�ɱ�̣������ڳ����������ڵ�оƬ�ϣ�ӵ�����ɵ�8 λCPU ����ϵͳ�ɱ��Flash��ʹ��AT89S52Ϊ�ڶ�Ƕ��ʽ����Ӧ��ϵͳ�ṩ��������Ч�Ľ�������� ��MCS-51��Ƭ����Ʒ���ݣ�8K�ֽ���ϵͳ�ɱ��Flash�洢����1000�β�д���ڣ�ȫ��̬������0Hz��33Hz���������ܳ���洢����32���ɱ��I/O���ߣ�����16λ��ʱ��/���������˸��ж�Դ��ȫ˫��UART����ͨ�������Ŀ��к͵���ģʽ��������жϿɻ��ѣ����Ź���ʱ����˫����ָ�룻�����ʶ����
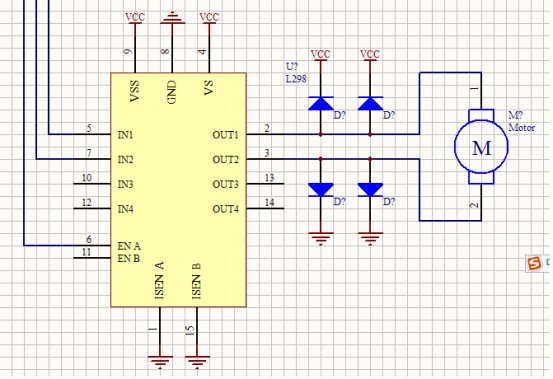
4��2.2 AT89S52��Ҫ�����о� 1��ӵ�����ɵ�8λCPU����ϵͳ�ɱ��Flash 2����Ƭ�ڲ���ʱ����������ͳ��߹���Ƶ�ʿ��� 12MHz�� 3���ڲ�����洢����ROM��Ϊ 8KB 4���ڲ����ݴ洢����RAM��Ϊ 256�ֽ� 5��32 ���ɱ��I/O ���� 6��8 ���ж�����Դ 7������ 16 λ��ʱ��/������ 8���������ܳ���洢�� 9��ȫ˫��UART����ͨ�� 4��2.3 AT89S52�����Ź��ܽ��� 4. 3 L298�������ģ�� 4. 3.1 L298���������� L298��SGS��˾�IJ�Ʒ��L298NΪ15���ܽǵĵ��鼯�ɵ�·���ߵ�ѹ���ߵ�������ͨ�������������L298N������DTL����TTL����ƽ���������Ը���(����̵�����ֱ���Ͳ�������)�Ϳ��ص�Դ����ܡ��ڲ�����4ͨ����������·������������Ϊ 1 A�����ɴ� 1.5 A��Vss ��ѹ��С 4.5 V�����ɴ� 36 V��Vs ��ѹ���ֵҲ�� 36 V��L298N��ֱ�ӶԵ�����п��ƣ���������·����������˫����� 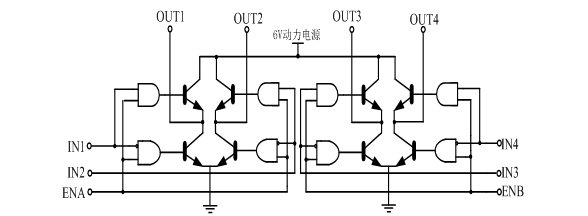 4. 3.2 L298�ڲ���ԭ��ͼ
4. 3.3 L298 ���ŷ��ż����� | | | �ֱ�Ϊ����H�ŵĵ��������ţ�����ʱ����ֱ�ӽӵ� | | | | | | | | | | ���������Դ����Сֵ�������ĵ͵�ƽ��ѹ�� | | |
4. 3.4 L298�������� ��ʹ�ܶ�Ϊ�ߵ�ƽʱ�������IN1ΪPWM�ź�,IN2Ϊ�͵�ƽ�ź�ʱ,�����ת�������IN1Ϊ�͵�ƽ�źţ�IN2ΪPWM�ź�ʱ,�����ת;;IN1��IN2�� ͬʱ,�������ֹͣ����ʹ�ܶ�Ϊ�͵�ƽʱ,�綯��ֹͣת���� �ڶ�ֱ���綯����ѹ�Ŀ��ƺ������У��뵼�幦������(L298)��ʹ���Ͽ��Է�Ϊ���ַ�ʽ�����ԷŴ�������ʽ�Ϳ���������ʽ�����ԷŴ�������ʽ�� �뵼�幦�������������������ŵ��ǿ���ԭ�����������С�����Ժã����ڽ���·����С��ȱ��Ϊ�������������������������ʵͺ�ɢ���������ء�����������ʽ��ʹ�뵼�幦�����������ڿ���״̬��ͨ�������ƣ�PWM�������Ƶ綯���ĵ�ѹ���Ӷ�ʵ�ֵ綯��ת�ٵĿ��ơ� 4. 4 LED�������ʾ 4. 4.1 LED��� LED��Light Emitting Diode������������ܣ���һ�ֹ�̬�İ뵼��������������ֱ�Ӱѵ�ת��Ϊ�⡣LED��������һ���뵼��ľ�Ƭ����Ƭ��һ�˸���һ��֧���ϣ�һ���Ǹ�������һ�����ӵ�Դ��������ʹ������Ƭ��������֬��װ�������뵼�徧Ƭ����������ɣ�һ������P�Ͱ뵼�壬���������Ѩռ������λ����һ����N�Ͱ뵼�壬�������Ҫ�ǵ��ӡ��������ְ뵼������������ʱ������֮����γ�һ����P-N�ᡱ�� ����������ͨ�����������������Ƭ��ʱ���Ӿͻᱻ����P������P������Ӹ���Ѩ���ϣ�Ȼ��ͻ��Թ��ӵ���ʽ���������������LED�����ԭ��������IJ���Ҳ���ǹ����ɫ�������γ�P-N��IJ��Ͼ����ġ��������뵼�弤�����⣬����������ʱ�ܷ����ѧ����İ뵼������ܡ��ϸ�ؽ�������LEDӦ�ý�Ӧ���ڷ���ɼ���Ķ����ܣ�������������Ķ����ܽк��ⷢ������ܣ�IRED,Infrared Emitting Diode���������ֵ�����ڿɼ���̲��������ɲ����������Ķ����ܳ�Ϊ���ⷢ������ܣ�����ϰ���ϰ��������ְ뵼�������ͳ��Ϊ��������ܡ� 4. 4.2 LED�߶�����ܵĽṹ
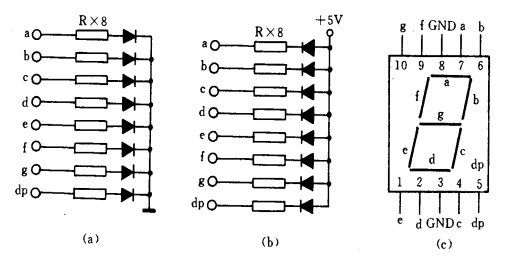
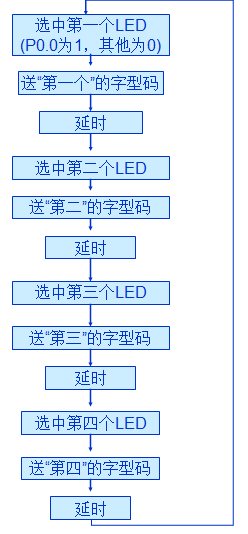
������ ������ �ܽ�ͼ ���У�ͼ��a��Ϊ�������ṹ��8�Ϸ�������ܵ�������������һ�������˷ֿ����ƣ�ʹ��ʱ�����˽ӵأ�Ҫʹ�ĸ���������ܣ����Ӧ�������˽Ӹߵ�ƽ��ͼ��b��Ϊ�������ṹ��8�˷�������ܵ�������������һ�������˷ֿ����ƣ�ʹ��ʱ�����˽ӵ�Դ��Ҫʹ�ĸ���������ܣ����Ӧ�������˽ӵء�����7�η�������ܹ���7�ʵ����Ρ�8��,1����������ܹ���С���㡣ͼ��c��Ϊ����ͼ����a-g�������벻ͬ��8λ�����Ʊ��룬����ʾ��ͬ�����ֻ��ַ���ͨ���ѿ��Ʒ�������ܵ�7����8��λ�����ܱ��Ƴ�Ϊ�ֶ��롣��ͬ���ֻ��ַ����ֶ��벻һ��������ͬһ�����ֻ��ַ������������Ӻ��������ӵ��ֶ���Ҳ��һ�������������������ֶ��뻥Ϊ���롣 4. 4.3�������ֺ��ַ����ֶ��� 4. 4.4 LED����ܺ͵�Ƭ�������� ��·�Ľӷ������˱��������λɨ����ʾ��ʽ�����Ӷ�ѡ���ͳ�ijλLED�������룬Ȼ��ѡͨ��λLED�� ������һ����ʱʱ�䡣Ȼ��ѡͨ��һλ��ֱ������λɨ ���ꡣ 4. 4.5�ij������� 4. 4.6��ϵͳ�е�Ƭ����LED������
4.5����ʽ���̿���ģ�� 4.5.1���̵Ĺ��ܼ����� ������һ����õ������豸,����һ�鰴���ļ��ϣ��ӹ����Ͽɷ�Ϊ���ּ����ܼ����֣����������������������ѯ�Ϳ���ϵͳ�Ĺ���״̬��ʵ�ּ��˻��Ի��� ���̵ķ��� ��a�����̰��սӿ�ԭ���ɷ�Ϊ���������DZ���������ࡣ��������̵���Ҫ������ʶ�������������Ӧ����ķ����� ���������Ҫ����Ӳ����ʵ�ֶԼ���ʶ�� �DZ��������Ҫ����������ʵ�ּ��̵Ķ�����ʶ�� ��b�����̰�����ṹ�ɷ�Ϊ����ʽ���������ʽ�������ࡣ ����ʽ������Ҫ���ڰ������ٵij���,����ʽ������Ҫ���ڰ����϶�ij��ϣ�Ҳ������ʽ���� 4.5.2����ʽ���� 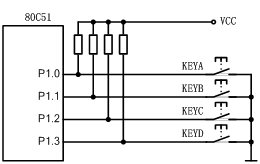 ����ʽ���̵İ����������ÿ��������һ��I/O���ߣ�һ��I/O�����ϵİ�������״̬����Ӱ������I/O���ߵĹ���״̬����ˣ�ͨ�����I/O���ߵĵ�ƽ״̬�������жϼ������ĸ���������
4.5.3����ʽ�����뵥Ƭ��������
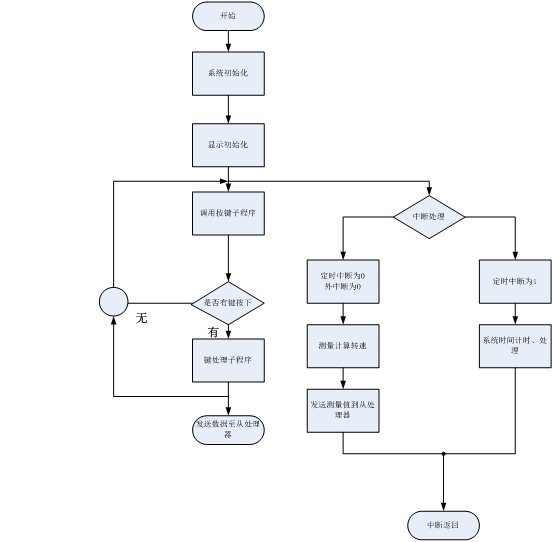
5ϵͳ������� ֱ��Ӧ��AT89S52����������ʵ��PWM�ź���������Ӳ��ʵ��PWM�źųɱ��͡������١�ʵ�ֱ�ݡ�������ͼ������ʾ��
5.1����ͼ 5.1.1����������ͼ
ͼ5.1ϵͳ����Ƭ���ܳ����ͼ
���� ͨ�����α�ҵ��ƣ�ʹ��ѧ���������鱾����ѧ����֪ʶ,Ҳʹ�������ᵽ��Ƭ������Ӧ������Ĺ㷺���������Ҷ�ѧ���ĵ�Ƭ��֪ʶ���˺ܶ�Ĺ��̣�ͬʱҲ�Ե�Ƭ����һ�ſγ̲����˸������Ȥ���ڱ��ογ���ƹ����У���ѧ�����������ϲ����йر���Ƶĸ�Ӳ������Դ�����а�����ֱ�����PWM���١�AT89S52��Ƭ����L289����ͼ�������Ź��ܵȣ�LED�������ʾ��Ϊ���α�ҵ����ṩ��һ�������ϡ� ������ҵ��Ƶij��ڽΣ��ѶȺܴ�û��ͷ����ͨ�������ڳ���ʦ��������˼·��ͬʱ����ͼ�������ϲ������ϣ������˱�ҵ����еĵ������⡣ͨ�����οƼ�����ʵ������ѧ�������ණ����֪���⿿�鱾�ϵĶ����Dz����ģ������ȥ�����ϡ���������Ӳ��������������ϣ��Ҷ������˲��ٵ����⣬�ڿ˷����ѵĹ����У���ѧ�������࣬�ر����ڿ�����ѧ�����Ķ����磨PWM����Ҳ�������ҵ�protel��ͼ��������ǰѧ��ʱ��Ԫ�������Ǹ�����ֻҪ���������ҳ����־Ϳ��ԣ�ֻҪ���߾Ϳ��ԣ�������Ǹ����Լ��������Ҫȥ�����о���ͬ������������ܶ�����ɣ��������˺ܴ���ջ��ܵĸ��������¼����棺 1��ͨ�����α�ҵ��ƣ��Ҳ����Ե�Ƭ�����˸�Ϊ������˽⣬��һ��������λ�����ͼ������������һ������ʶ�� 2����һ����ǿ���ҵĶ�������������רҵ֪ʶ������������ѧϰ�����ȥ˼���ͽ�����⣬�Լ�������ظı䷽��ȥʵ����Ʒ������ر��������ᵽ��������Ӳ����ϵ���Ҫ�ԣ��Լ����ߵ���ϵ��������á� 3�������˽��Ƭ�������Ե��������������Ҫ�ԡ�ͬʱ�������ҵ��Ƶľ���Ҳʹ�������dz������֪�����κ����鶼Ӧ��̤ʵ�أ��̿�Ŭ����ȥ����ֻ���������������á�
��¼2��ԭ��ͼ
��Ƭ��Դ��������: - *********************************************************************
- ֱ�����PWM����
- ����������ʹ�õ�Ƭ��T0��ʱ������(xxxHz)���������źţ��䵽L298N��EN_A
- ʵ��˫ֱ��������ٶȵ��ء�
- �����ڣ�2011-5-7
- *********************************************************************/
- #include<reg52.h>
- #include<intrins.h>
- #define uchar unsigned char
- #define uint unsigned int
-
- /**********************************************************************
- L298n�ӿڶ���
- **********************************************************************/
- sbit MOTOR_A_2=P3^6;
- sbit MOTOR_A_1=P3^7;
- sbit EN_MOTOR_A =P3^4;
- sbit k1=P1^5; //����k1Ϊp1.5��
- sbit k2=P3^1; //����k2Ϊp3.1��
- sbit k3=P3^2; //����k3Ϊp3.2��
- sbit k4=P3^3; //����k4Ϊp3.3��
- uchar T=0; //��ʱ���
- uchar W=0; //����ֵ 0~100
- uchar A=0; //������ 0��1
- uchar k=0; //�������
- uchar i=0; //��������
-
-
- uchar code table1[]={
- 0x3f,0x06,0x5b,0x4f,
- 0x66,0x6d,0x7d,0x07,
- 0x7f,0x6f,0x77,0x7c,
- 0x39,0x5e,0x79,0x71};
-
- uchar code table2[]={0xef,0xbf,0xdf,0x7f};
-
- void delayms(uint t);
- /**********************************************************************
- �������ʾ
- **********************************************************************/
- void disp(void)
- {
- P0=table2[3];
- P2=table1[W%10]; //��ʾռ�ձȸ�λ
- delayms(1); //��ʱ1ms
- P0=0xff; //P0��1
-
- P0=table2[2];
- P2=table1[W/100]; //��ʾռ�ձȰ�λ
- delayms(1); //��ʱ1ms
- P0=0xff; //P0��1
-
- P0=table2[1];
- P2=table1[W/10%10]; //��ʾռ�ձ�ʮλ
- delayms(1); //��ʱ1ms
- P0=0xff; //P0��1
-
- P0=table2[0];
- P2=table1[A]; //��ʾ����
- delayms(1); //��ʱ1ms
- P0=0xff; //P0��1
- }
-
- /**********************************************************************
- ��ʱ����������
- **********************************************************************/
-
-
- void init(void)
- {
- //�����ж�
- TMOD=0x01;
- EA=1;
- ET0=1;
- TR0=1;
- //���ö�ʱʱ��
- TH0=0xfd;
- TL0=0x17;
- }
-
- void timer0() interrupt 1
- {
- //���ö�ʱ��ʱ��
- TL0=0x17;
- TH0=0xff;
- T++; //��ʱ��Ǽ�1
- disp(); //�������ʾ
- if(T>W)
- EN_MOTOR_A =1;
- else
- EN_MOTOR_A =0;
- if(T==100)
- T=0;
-
- }
- /**********************************************************************
- ��ʱ1ms
- **********************************************************************/
- void delayms(uint t)
- {
- uchar j;
- while(t--)
- {
- for(j=0;j<250;j++) //ѭ��250��
- {
- _nop_(); //ϵͳ��ʱ
- _nop_(); //ϵͳ��ʱ
- _nop_(); //ϵͳ��ʱ
- _nop_(); //ϵͳ��ʱ
- }
- }
- }
- /**********************************************************************
- �����������
- **********************************************************************/
- void key(void) //�����жϳ���
- {
- if(k1==0) //����1����
- {
- while(k1==0); //����1̧��
- if(W==100) //�������Ϊ100
- W=0; //������0
- else
- W+=1; //�����1
- }
- else if(k2==0) //����2����
- {
- while(k2==0); //����2̧��
- if(W==0) //�������Ϊ0
- W=100; //�������ó�100
- else
- W-=1; //�����1
- }
- else if(k3==0) //����3����
- {
- while(k3==0); //����3̧��
- A=!A; //������ȡ��
- k=0; //���������0
- ����������������
- �����������ڱ���ƪ�� ���´������51�����ظ�����������
��������51hei�ṩ����:
| 
 [��������]
[��������]

 ����ԱQQ:125739409;��������QQȺ281945664
����ԱQQ:125739409;��������QQȺ281945664