前段时间的RoboMaster机器人大赛相信不少人都进行了或多或少的了解,不过这种机器人的轮胎似乎长得有点奇怪。
这种轮胎不会像汽车那样转向却能够让赛场上的机器人朝着各个方向移动。今天我们就来说说这种让神奇的“麦克纳姆轮”。

其实这篇文章是两年前一位知乎网友“科长”发表的,原文名称是“【学渣的自我修养】麦克纳姆轮浅谈”,而且还做了一段小视频,只是在视频中这麦克纳姆轮老师掉链子。下面就让我们来看看这位“科长”是科普这“麦克纳姆轮”的……
先看视频:
什么是麦克纳姆轮

在竞赛机器人和特殊工种机器人中,全向移动经常是一个必需的功能。「全向移动」意味着可以在平面内做出任意方向平移同时自转的动作。为了实现全向移动,一般机器人会使用「全向轮」(Omni Wheel)或「麦克纳姆轮」(Mecanum Wheel)这两种特殊轮子。
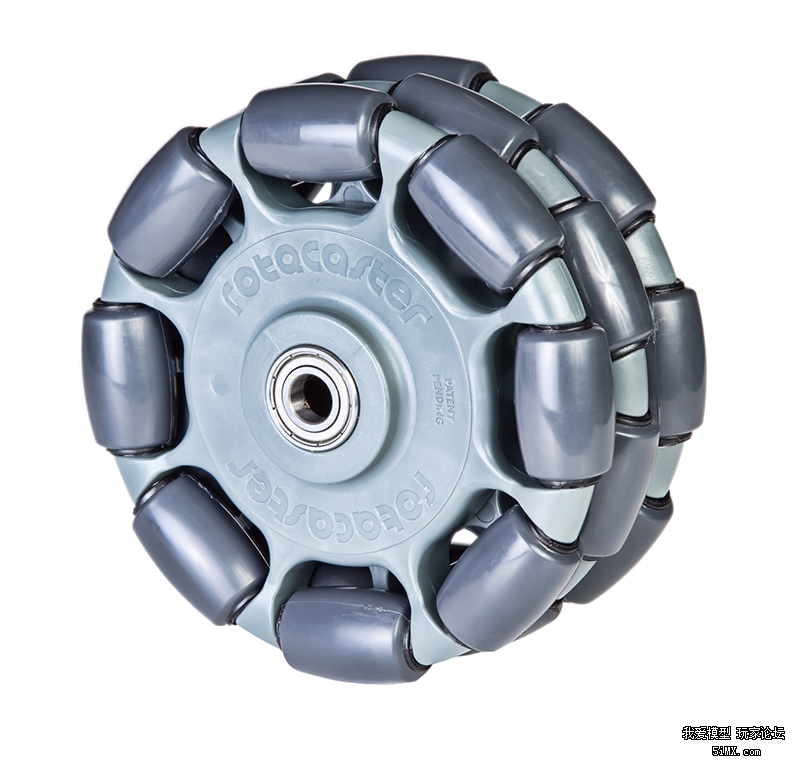
全向轮

麦克纳姆轮
全向轮与麦克纳姆轮的共同点在于他们都由两大部分组成:轮毂和辊子(roller)。轮毂是整个轮子的主体支架,辊子则是安装在轮毂上的鼓状物。全向轮的 轮毂轴与辊子转轴相互垂直,而麦克纳姆轮的轮毂轴与辊子转轴呈 45° 角。理论上,这个夹角可以是任意值,根据不同的夹角可以制作出不同的轮子,但最常用的还是这两种。
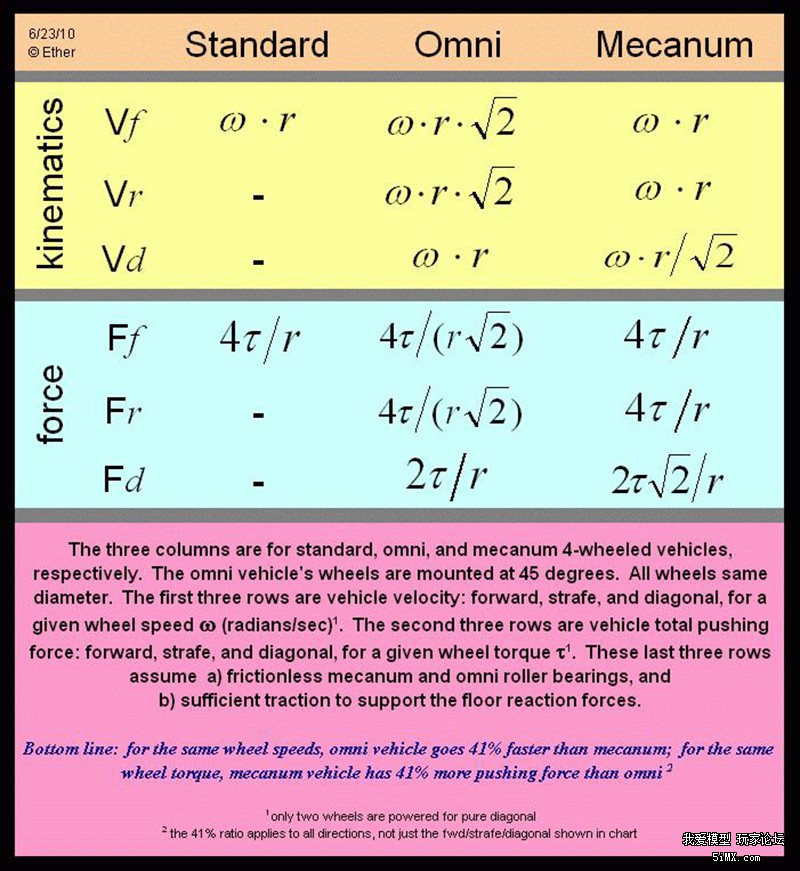
全向轮与麦克纳姆轮(以下简称「麦轮」)在结构、力学特性、运动学特性上都有差异,其本质原因是轮毂轴与辊子转轴的角度不同。经过分析,二者的运动学和力学特性区别可以通过上面表格来体现。
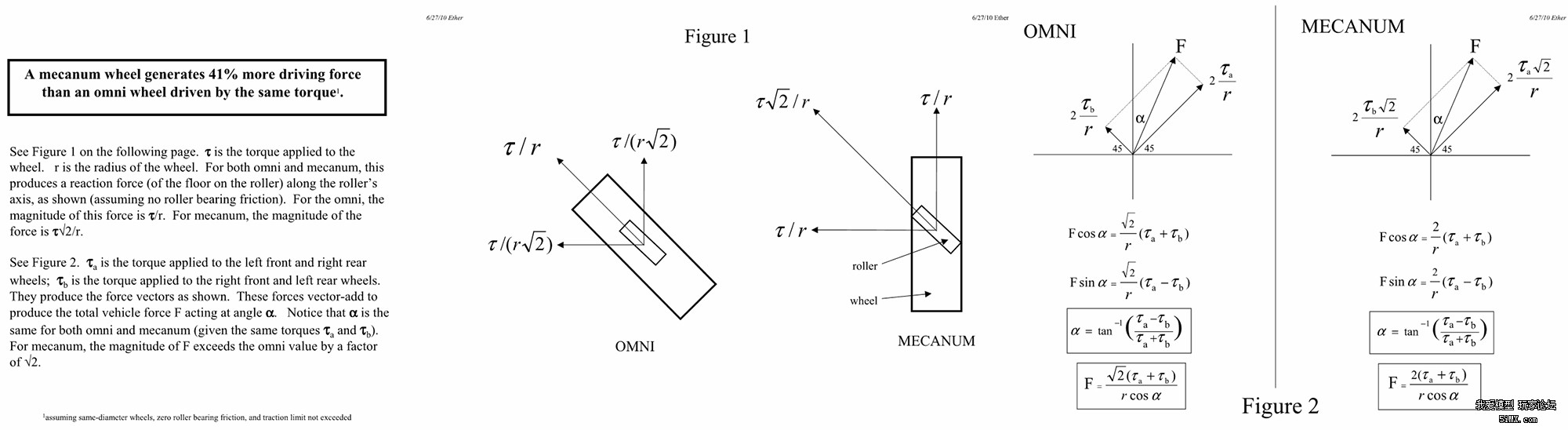
计算过程如上图所示(供参考),学霸可点开大图验算。
近 年来,麦轮的应用逐渐增多,特别是在 Robocon、FRC 等机器人赛事上。这是因为麦克纳姆轮可以像传统轮子一样,安装在相互平行的轴上。而若想使用全向轮完成类似的功能,几个轮毂轴之间的角度就必须是 60°,90° 或 120° 等角度,这样的角度生产和制造起来比较麻烦。
 所以许多工业全向移动平台都是使用麦克纳姆轮而不是全向轮,比如这个国产的叉车: 全向移动平台 麦克纳姆轮叉车 美科斯叉车。
另外一个原因,可能是麦轮的造型比全向轮要酷炫得多,看起来有一种不明觉厉的感觉……
 的确,第一次看到麦轮运转起来,不少人都会惊叹。以下视频直观地说明了麦轮底盘在平移和旋转时的轮子旋转方向。
麦克纳姆轮工作原理
麦轮的安装方法
麦轮一般是四个一组使用,两个左旋轮,两个右旋轮。左旋轮和右旋轮呈手性对称,区别如下图。 安 装方式有多种,主要分为:X-正方形(X-square)、X-长方形(X-rectangle)、O-正方形(O-square)、O-长方形(O- rectangle)。其中 X 和 O 表示的是与四个轮子地面接触的辊子所形成的图形;正方形与长方形指的是四个轮子与地面接触点所围成的形状。
X-正方形:轮子转动产生的力矩会经过同一个点,所以 yaw 轴无法主动旋转,也无法主动保持 yaw 轴的角度。一般几乎不会使用这种安装方式。
X-长方形:轮子转动可以产生 yaw 轴转动力矩,但转动力矩的力臂一般会比较短。这种安装方式也不多见。
O-正方形:四个轮子位于正方形的四个顶点,平移和旋转都没有任何问题。受限于机器人底盘的形状、尺寸等因素,这种安装方式虽然理想,但可遇而不可求。
O-长方形:轮子转动可以产生 yaw 轴转动力矩,而且转动力矩的力臂也比较长。是最常见的安装方式。
麦轮底盘的正逆运动学模型
以O-长方形的安装方式为例,四个轮子的着地点形成一个矩形。正运动学模型(forward kinematic model)将得到一系列公式,让我们可以通过四个轮子的速度,计算出底盘的运动状态;而逆运动学模型(inverse kinematic model)得到的公式则是可以根据底盘的运动状态解算出四个轮子的速度。需要注意的是,底盘的运动可以用三个独立变量来描述:X轴平动、Y轴平动、 yaw 轴自转;而四个麦轮的速度也是由四个独立的电机提供的。所以四个麦轮的合理速度是存在某种约束关系的,逆运动学可以得到唯一解,而正运动学中不符合这个约束关系的方程将无解。
先试图构建逆运动学模型,由于麦轮底盘的数学模型比较复杂,我们在此分四步进行:
①将底盘的运动分解为三个独立变量来描述;
②根据第一步的结果,计算出每个轮子轴心位置的速度;
③根据第二步的结果,计算出每个轮子与地面接触的辊子的速度;
④根据第三部的结果,计算出轮子的真实转速。
一、底盘运动的分解
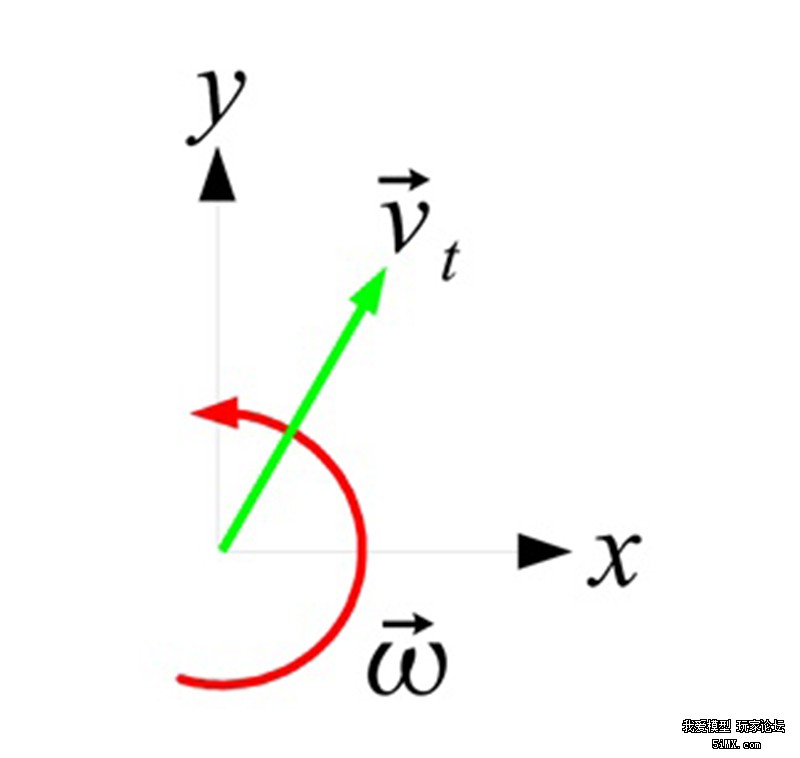
我们知道,刚体在平面内的运动可以分解为三个独立分量:X轴平动、Y轴平动、yaw 轴自转。如下图所示,底盘的运动也可以分解为三个量:
 表示 X 轴运动的速度,即左右方向,定义向右为正; 表示 X 轴运动的速度,即左右方向,定义向右为正;
 表示 Y 轴运动的速度,即前后方向,定义向前为正; 表示 Y 轴运动的速度,即前后方向,定义向前为正;
 右表示 yaw 轴自转的角速度,定义逆时针为正。 右表示 yaw 轴自转的角速度,定义逆时针为正。
以上三个量一般都视为四个轮子的几何中心(矩形的对角线交点)的速度。
二、计算出轮子轴心位置的速度
定义:
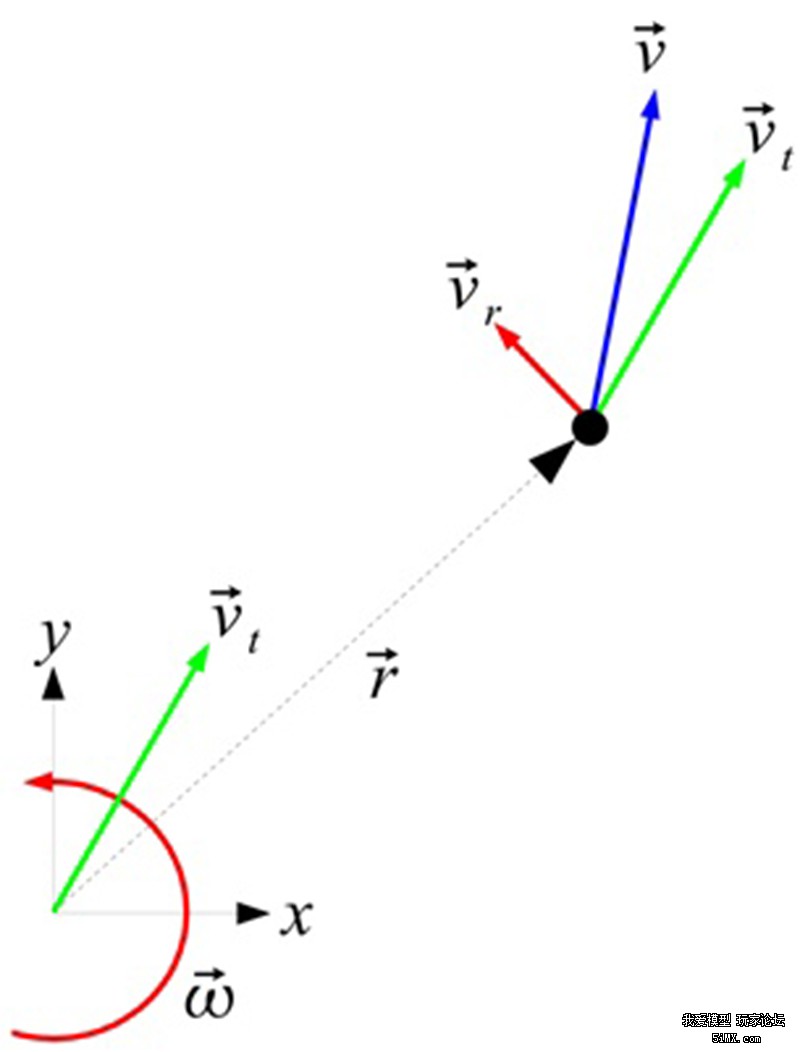
 为从几何中心指向轮子轴心的矢量; 为从几何中心指向轮子轴心的矢量;
 为轮子轴心的运动速度矢量; 为轮子轴心的运动速度矢量;
 为轮子轴心沿垂直于 \vec{r} 的方向(即切线方向)的速度分量; 为轮子轴心沿垂直于 \vec{r} 的方向(即切线方向)的速度分量;
那么可以计算出:
分别计算 X、Y 轴的分量为:
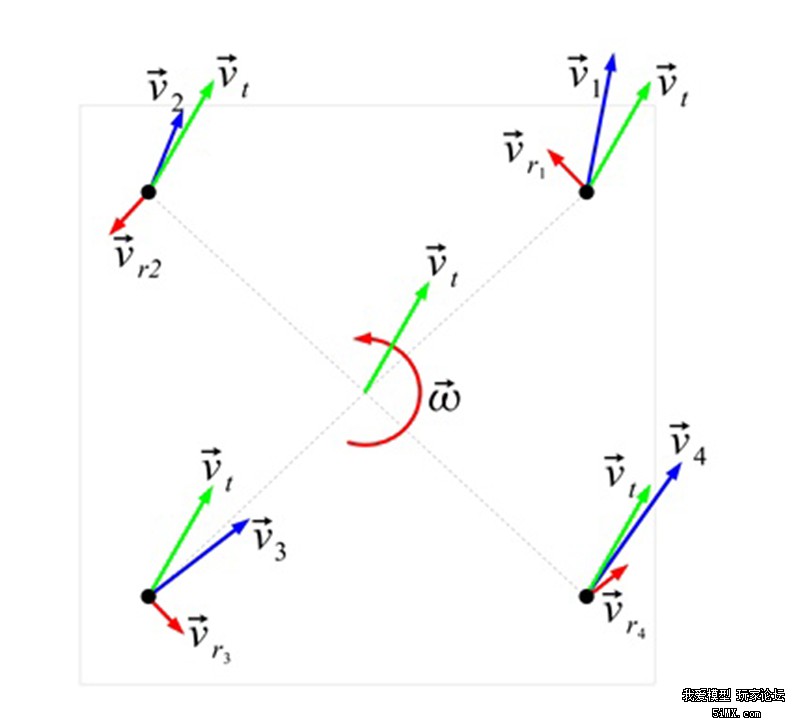
同理可以算出其他三个轮子轴心的速度。
三、计算辊子的速度
根据轮子轴心的速度,可以分解出沿辊子方向的速度 和垂直于辊子方向的速度 和垂直于辊子方向的速度 。其中 。其中 是可以无视的(思考题:为什么垂直方向的速度可以无视?),而 是可以无视的(思考题:为什么垂直方向的速度可以无视?),而
其中 是沿辊子方向的单位矢量。 是沿辊子方向的单位矢量。
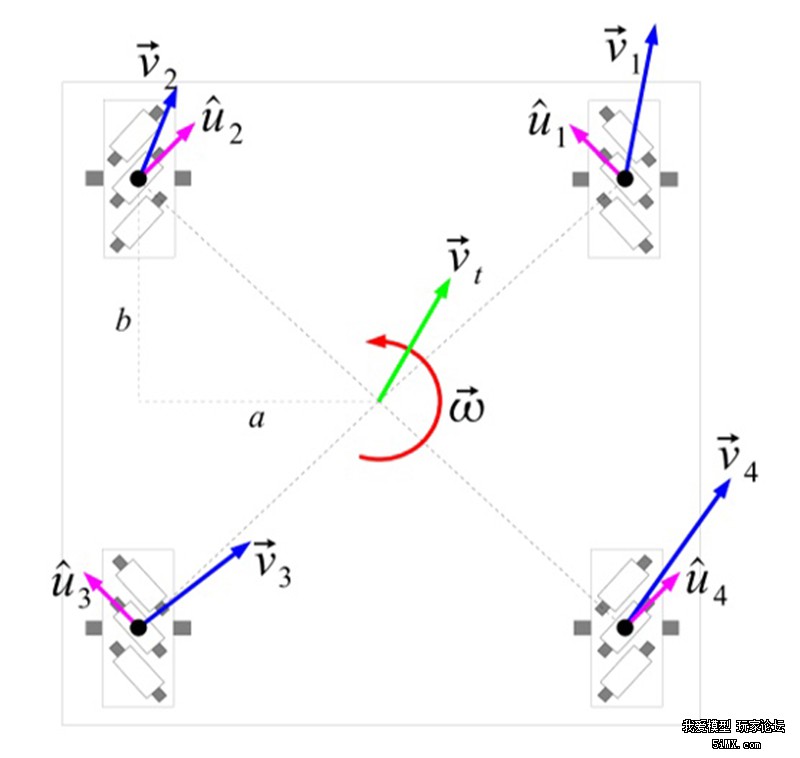
四、计算轮子的速度
从辊子速度到轮子转速的计算比较简单:
根据上图所示的 a 和 b 的定义,有
结合以上四个步骤,可以根据底盘运动状态解算出四个轮子的转速:
以上方程组就是O-长方形麦轮底盘的逆运动学模型,而正运动学模型可以直接根据逆运动学模型中的三个方程解出来,此处不再赘述。
另一种计算方式
「传统」的推导过程虽然严谨,但还是比较繁琐的。这里介绍一种简单的逆运动学计算方式。
我们知道,全向移动底盘是一个纯线性系统,而刚体运动又可以线性分解为三个分量。那么只需要计算出麦轮底盘在「沿X轴平移」、「沿Y轴平移」、「绕几何中 心自转」时,四个轮子的速度,就可以通过简单的加法,计算出这三种简单运动所合成的「平动+旋转」运动时所需要的四个轮子的转速。而这三种简单运动时,四 个轮子的速度可以通过简单的测试,或是推动底盘观察现象得出。
当底盘沿着 X 轴平移时:
当底盘沿着 Y 轴平移时:
当底盘绕几何中心自转时:
将以上三个方程组相加,得到的恰好是根据「传统」方法计算出的结果。这种计算方式不仅适用于O-长方形的麦轮底盘,也适用于任何一种全向移动的机器人底盘。
Makeblock 麦轮底盘的组装
理论分析完成,可以开始尝试将其付诸实践了。
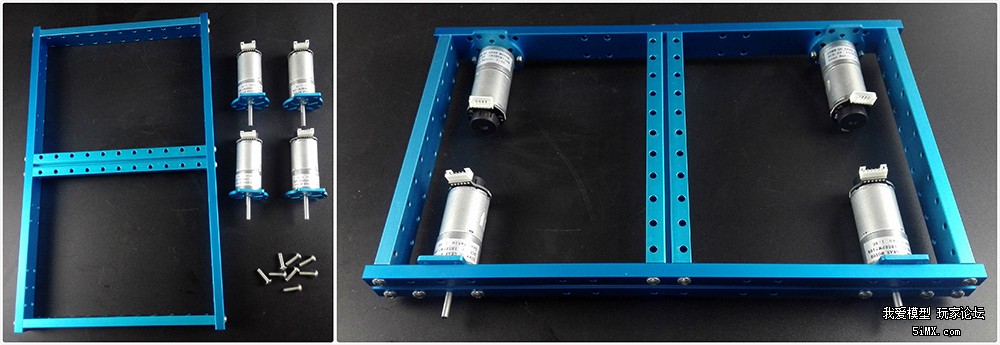
第一步,组装矩形框架。
第二步,组装电机模块。
由于麦轮底盘的四个轮子速度有约束关系,必须精确地控制每个轮子的速度,否则将会导致辊子与地面发生滑动摩擦,不仅会让底盘运动异常,还会让麦轮的寿命减少。所以必须使用编码电机。
第三步,将电机模块安装到框架上。
第四步,将麦轮安装到框架上。
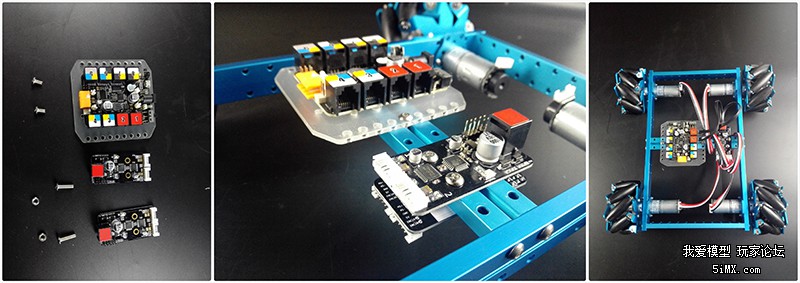
第五步,安装电路板并接线。
编码电机必须配上相应的驱动板才能正常工作。这里使用的 Makeblock 编码电机驱动板,每一块板可以驱动两个电机。接线顺序在下文中会提及,也可以随意接上,在代码中定义好对应的顺序即可。
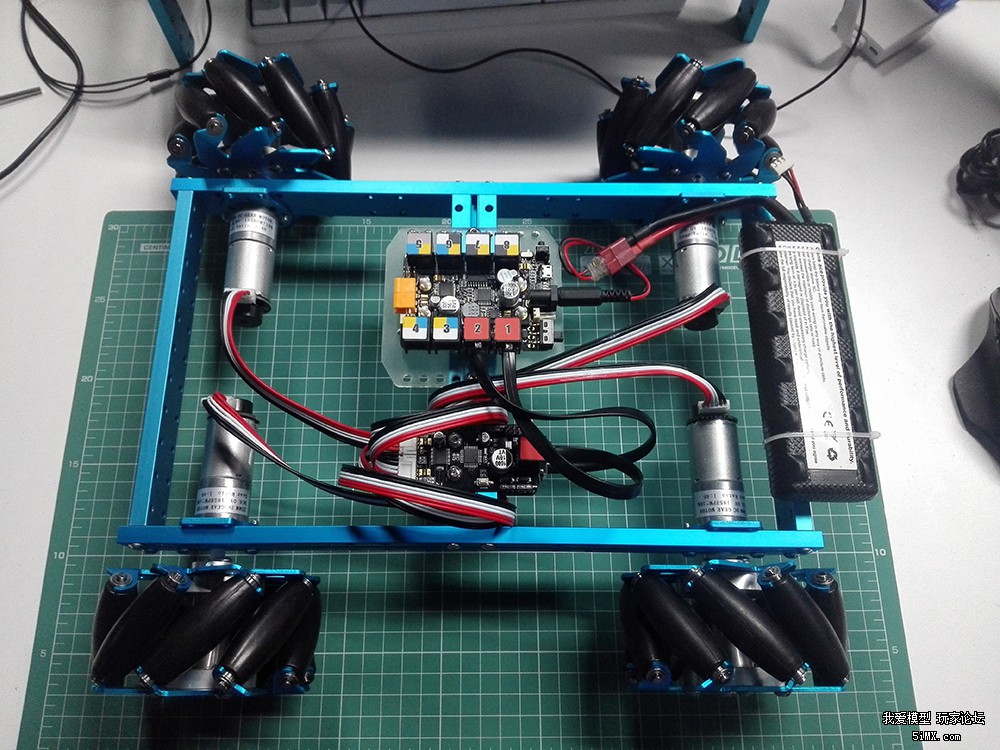
第六步,装上电池。
至此,一个能独立运行的麦轮底盘就完成了。
控制程序
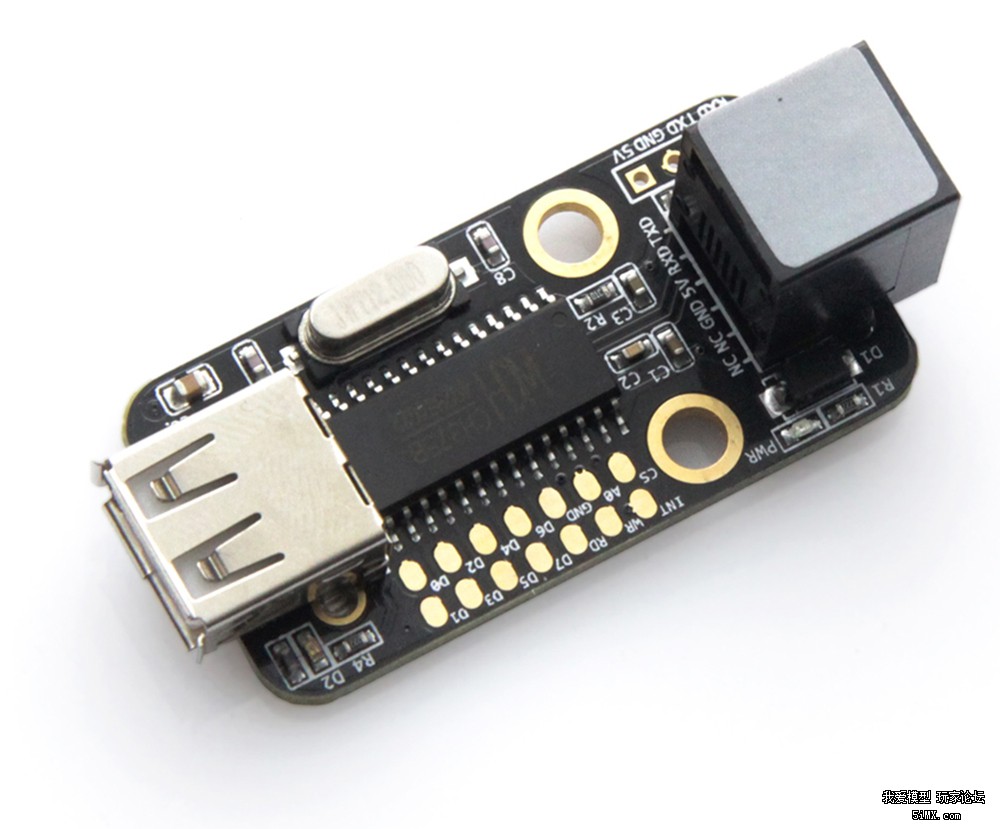
根据麦轮的底盘的运动学模型,要完全控制它的运动,需要有三个控制量:X轴速度、Y轴速度、自转角速度。要产生这三个控制量,有很多种方法,本文将使用一个 USB 游戏手柄,左边的摇杆产生平移速度,右边的摇杆产生角速度。
首先将一个 USB Host 模块连接到 Orion 主板的 3 口。
然后插上一个无线 USB 游戏手柄。
然后再添加其他细节,就大功告成啦!
麦克纳姆轮的有点和缺点都是非常明确的!采用麦克纳姆轮 的车子大都移动异常灵活,战术机动性能非常好;但是这种轮胎的越野性能却非常差,跨越障碍的能力甚至不如普通轮胎,特别是当坡度较大的时候,甚至还会溜 坡。所以配备这种车胎的设备大多是一些场地竞技机器人和室内仓储机器人等,而前面所说的那台叉车也只能在路况较好的铺装路面跑跑。 | 





















 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

