|
( 1 ) 比例的作用
比例作用的引入是为了及时 但是在接近稳态区域时,如果比例系数选择过大, 则会导致过大的超调, 甚至可能带来系统的不稳定。
( 2 ) 积分的作用
积分作用的引入主要是为了 保证 输出值y ( t ) 在稳态时 对设定值r ( t ) 的无静差跟踪。积分作用的引入,能消除系统静差,但是在系统响应过渡过程的初期,一般偏差比较大, 如果不选取适当的积分系数, 就可能使系统相应过程出现较大的超调或者引起积分饱和现象。
( 3 ) 微分的作用
微分作用的引入主要是为了改善闭环系统的稳定性和动态响应速度。 因为微分系数主要是影响系统误差变化速率的, 它主要是在系统相应过程中当误差向某个方向变化时起制动作用,提前预报误差的变化方向,能有效地减小超调。但是如果微分系数过大,就会使阻尼过大,导致系统调节时间过长。
1/mydelay or ui=myadd(0)*a+myadd(-1)*b 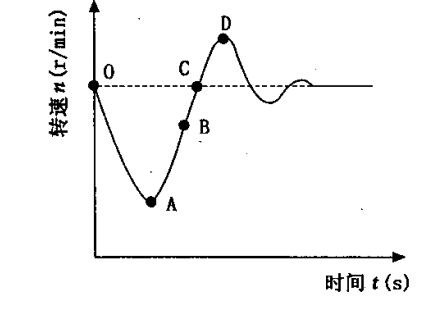
比例积分和微分 微分除掉剩下PI. ui=myadd(0)*a+myadd(-1)*b PID控制器参数的工程整定方法,主要有临界比例法、反应曲线法和衰减法。 三种方法各有其特点,其共同点都是通过试验,然后按照工程经验公式对控制器参数进行整定。但无论采用哪一种方法所得到的控制器参数,都需要在实际运行中进行最后调整与完善。 现在一般采用的是临界比例法。利用该方法进行PID控制器参数的整定步骤如下: (1)首先预选择一个足够短的采样周期让系统工作﹔ (2)仅加入比例控制环节,直到系统对输入的阶跃响应出现临界振荡,记下这时的比例放大系数和临界振荡周期﹔ (3)在一定的控制度下通过公式计算得到PID控制器的参数。
PID参数的设定:是靠经验及工艺的熟悉,参考测量值跟踪与设定值曲线,从而调整P\I\D的大小。
PID控制器参数的工程整定,各种调节系统中P.I.D参数经验数据以下可参照:
温度T: P=20~60%,T=180~600s,D=3-180s
压力P: P=30~70%,T=24~180s,
液位L: P=20~80%,T=60~300s,
流量L: P=40~100%,T=6~60s。
书上的常用口诀:
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。微分时间应加长
理想曲线两个波,前高后低4比1
一看二调多分析,调节质量不会低
利用Ziegler-Nichols方法进行PID参数设置
在实际应用中,我们尽量避免使用高深复杂的数学公式,希望能使经验法更多的发挥能力,这样既可以节省很多时间,也可以通过经验的传授使更多的工程师或工人可以掌握一种简单有效的方法来进行PID控制器的调节。 传统的PID经验调节大体分为以下几步: 1. 关闭控制器的I和D元件,加大P元件,使产生振荡。 2. 减小P,使系统找到临界振荡点。 3. 加大I,使系统达到设定值。 4. 重新上电,观察超调、振荡和稳定时间是否符合系统要求。 5. 针对超调和振荡的情况适当增加微分项。 以上5个步骤可能是大家在调节PID控制器时的普遍步骤,但是在寻找合时的I和D参数时,并非易事。如果能够根据经典的Ziegler-Nichols(ZN法)公式来初步确定I和D元件的参数,会对我们的调试起到很大帮助。 John Ziegler和Nathaniel Nichols发明了著名的回路整定技术使得PID算法在所有应用在工业领域内的反馈控制策略中是最常用的。Ziegler-Nichols整定技术是1942年第一次发表出来,直到现在还被广泛地应用着。 所谓的对PID回路的“整定”就是指调整控制器对实际值与设定值之间的误差产生的反作用的积极程度。如果正巧控制过程是相对缓慢的话,那么PID算法可以设置成只要有一个随机的干扰改变了过程变量或者一个操作改变了设定值时,就能采取快速和显著的动作。
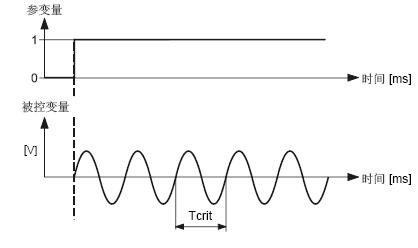
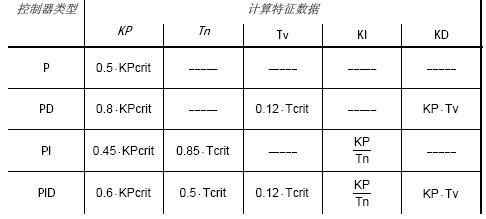
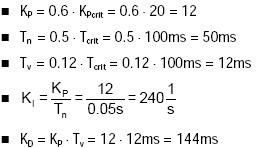
相反地,如果控制过程对执行器是特别地灵敏而控制器是用来操作过程变量的话,那么PID算法必须在比较长的一段时间内应用更为保守的校正力。回路整定的本质就是确定对控制器作用产生的过程反作用的积极程度和PID算法对消除误差可以提供多大的帮助。 经过多年的发展,Ziegler-Nichols方法已经发展成为一种在参数设定中,处于经验和计算法之间的中间方法。这种方法可以为控制器确定非常精确的参数,在此之后也可进行微调。 Ziegler-Nichols方法分为两步: 1. 构建闭环控制回路,确定稳定极限。 2. 根据公式计算控制器参数。 稳定极限是由P元件决定的。当出现稳态振荡时就达到了这个极限。产生了临界系数Kpcrit和临界振荡周期Tcrit。 确定临界系数Kpcrit和临界振荡周期Tcrit后,根据下表的公式,计算其他参数: 根据上述方法,举例说明: 1. 假设Kpcrit=20 2. Tcrit=100ms 确定PID控制器的P、I、D元件的系数以及积分时间内Tn和微分时间Tv。 优化PID控制器的参数: 综上可以看书,在调试PID控制器时,如果应用Ziegler-Nichols方法,可以快速、精确的算出相应的各参数数值,再之后只需进行微调便可得到理想的控制效果。 |
完整的Word格式文档51黑下载地址:
 pid的基本知识大全.docx
(67.19 KB, 下载次数: 29)
pid的基本知识大全.docx
(67.19 KB, 下载次数: 29)
| 








 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

