本次任务设计了一款功能比较强大的智能小车,具有以下几个功能:寻迹、避障、发光发声。小车由拍手启动电机,可以按照给定的黑色轨迹行驶,由前端的LED灯指示方向,并且在寻迹过程中,位于后方的LED灯实现流水灯的功能;在遇到障碍物时,由前端检测到后蜂鸣器报警,小车后退3秒并由数码管显示倒计时,后退3秒后小车向右转向调整角度来避过障碍,避障过程中的LED全灭。本小车以前轮的两个电机来驱动,通过各种传感器件,采集各种信息,送入主控单元AT89S52单片机,处理数据后完成相应动作,实现无人控制即可完成一系列动作。
一、设计目的
利用一个以8位单片机为核心的小型单片机应用系统完成一个简单的项目,从项目的可行性分析、硬件测试、系统的框图构造、到软件的设计调试,综合运用所学课程的相关知识,掌握具有A/D、七段LED显示,RS-485通信、watchdog的接口电路的单片机应用系统的设计思想和方法。培养学生的工程设计思想和科学研究能力,使学生在分析问题、解决问题和动手能力等方面有所提高,初步达到能够设计、调试一个小型单片机应用系统,并了解工程项目设计实施的全过程。
二、设计任务分析
(一)、设计任务内容
1、小车可按设计行走
2、可避障,避悬崖
3、可按固定路线寻迹行驶
(三)、硬件环境
计算机、伟福系统仿真器、89C51单片机
(四)、设计思路
要求明确设计任务内容、任务分工、硬件环境、设计思路等;首先对LED灯、七段数码显示管、话筒、光敏电阻、按键以及蜂鸣器进行自检确保硬件的正常使用,根据任务目标要求小车可以实现寻迹、避障等功能。
次任务在分块设计程序完成各种外设以及传感器的检测后,对各个检测模块进行优化,先进行前端红外检测的设计,实现三组红外探测在分别检测到信号后控制小车的前进、后退、左转、右转、停止功能,三部分完成后进行组合,实现左侧检测到黑线、右转、前段右侧LED亮,右侧检测到黑线、左转、前段左侧LED亮,这里的目的是实现寻迹功能;然后,在前端检测到信号(即障碍物)时,蜂鸣器发出警报,小车后退3秒并由数码管显示倒计时,右转,这里的目的是完成避障功能;主要任务完成后,需要尽可能的加入外设,因此我们设计了在寻迹时后排LED的流水灯以及声控启动小车,加入到了主程序中。
框图
、自检程序框图
蜂鸣器自检框图
说明:蜂鸣器的自检采用给定两种延时不同的声音,循环实现蜂鸣器的响应。经检验小车的蜂鸣器焊接没有问题。
光敏自检框图
说明:光敏电阻在有遮挡时可以认为是黑天,因此有遮挡时(p05=0)小车的所有灯亮,无遮挡时灯灭。经检验,小车光敏电阻、前板指示灯以及LED灯没有问题。
3.话筒自检框图
说明:启动小车后,话筒检测到高声后,小车直走;再次检测到高声后,小车停止。经检验,小车的话筒以及电机焊接没有问题。 4.按键自检框图
说明:启动小车后,按下s2键时小车直走,按下s1键时,小车停止。经检验,此程序可循环执行并且小车的按键焊接没有问题。 5.数码管自检框图
说明:这里直接给编程使七段数码管全部点亮。经检验,小车的数码管焊接没有问题。
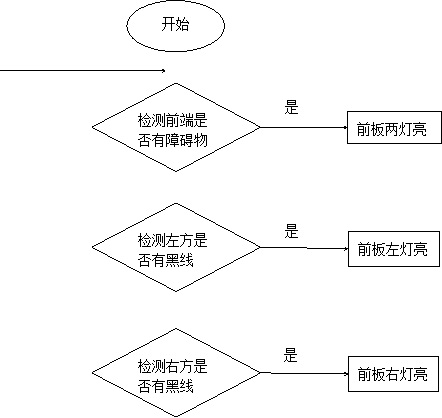
6.前板红外探头自检框图
说明:当前方的红外探测到障碍物时,前板的两个灯都亮;左边检测到黑线时,左灯亮;右边检测到黑线时,右灯亮,这部分程序可以循环执行。经检验,小车的三个红外探头焊接没有问题。(二)、主程序框图
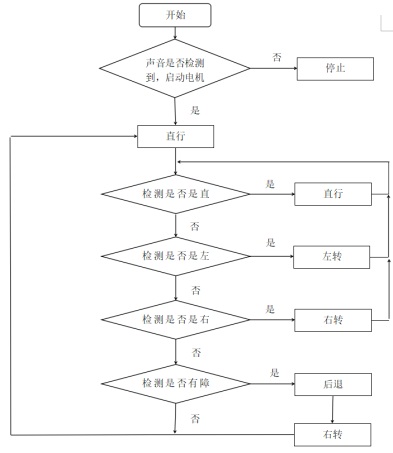
说明:声控启动小车,直行,如果当前前方红外探头没有检测到障碍,左右红外也没有检测到黑线,则直行;如果右侧检测到黑线,左转,左灯亮;如果左侧检测到黑线,右转,右灯亮;如果前方检测到障碍物,小车马上后退,然后右转调整角度;执行完避障程序后,继续执行寻迹程序。 #include<reg51.h>
typedef unsigned int u16; //定义变量
sbit p06=P0^6; //蜂鸣器
void delay(u16 i) //延时程序
{while(i--);} //i=1大约为1us
void fm() //主程序
{ while(1) //循环
{ p06=0; //蜂鸣器响
delay(10000);
p06=1; //蜂鸣器停止响声
delay(5000);} }
光敏自检程序
#include<reg51.h>
sbit p05=P0^5; //光敏电阻
sbit p20=P2^0; //前端左侧灯
sbit p07=P0^7; //前端右侧灯
typedef unsigned int u16; //定义变量
void delay(u16 i) //延时程序
{while(i--);} //i=1大约1us
void gm() //主程序
{ while (1) //循环
{ if(p05==0) //光敏电阻被遮挡
{ p1=0x00; //后排灯全亮
p07=0; //前端右侧灯亮
p20=0;} //前端左侧灯亮
else
{ p1=0xff; //后排灯全熄灭
p07=1; //前端右侧灯熄灭
p20=1; }}} //前端左侧灯熄灭
话筒自检程序
#include<reg51.h>
typedef unsigned int u16; //定义变量
sbit B1=P0^4; //麦克风
void delay(u16 i) //延时程序
{ while(i--); } //i=1大约1us
void go() //前进
{ p00=0;
p01=1; //左电机前进
p02=1;
p03=0;} //右电机前进
void stop() //停止
{p00=0;
p01=0; //左电机停止
p02=0;
p03=0;} //右电机停止
void main() //主程序
{ while(1) //循环
{ if(B1==0) //麦克风检测到声音信号
{ go();} //前进
if(B1==0) //麦克风再次检测到声音信号
{ stop();}}} //停止
按键自检程序
#include<reg51.h>
typedef unsigned int u16; //定义变量
sbit s1=P3^2; //左侧开关S1
sbit s1=P3^4; //右侧开关S2
sbit p00=P0^0; //左侧电机
sbit p01=P0^1; //左侧电机
sbit p02=P0^2; //右侧电机
sbit p03=P0^3; //右侧电机
void delay(u16 i) //延时程序
{while(i--);} //i=1大约为1us
void go() //前进
{p00=1;
p01=0;
p02=0;
p03=1;}
void stop() //停止
{p00=0;
p01=0;
p02=0;
p03=0;}
void za() //左开关按键
{ if(s1==0) //开关S1按下
{ delay(1000); //消抖
if(s1==0) //S1按下
{stop();} //执行停止
Else //S1未按下
{go();}}} //执行前进
void ya() //右开关按键
{if(s2==0) //开关S2按下
{delay(1000); //消抖
if(s2==0) //S2按下
{go();} //执行前进
else //S2未按下
{stop();}}} //执行停止
数码管自检程序
#include<reg51.h>
sbit p21=P2^1; //七段数码管g
sbit p22=P2^2; //七段数码管f
sbit p23=P2^3; //七段数码管e
sbit p24=P2^4; //七段数码管d
sbit p25=P2^5; //七段数码管c
sbit p26=P2^6; //七段数码管b
sbit p27=P2^7; //七段数码管a
void go() //主程序
{p21=0; //七段数码管g亮
p22=0; //七段数码管f亮
p23=0; //七段数码管e亮
p24=0; //七段数码管d亮
p25=0; //七段数码管c亮
p26=0; //七段数码管b亮
p27=0;} //七段数码管a亮
前板红外探头自检程序
#include<reg51.h>
sbit p37=P3^7; //前端红外接收
sbit p35=P3^5; //前端左侧红外接收
sbit p36=P3^6; //前端右侧红外接收
sbit p20=P2^0; //前端左侧灯
sbit p07=P0^7; //前端右侧灯
sbit p25=P2^5; //七段数码管c亮
sbit p26=P2^6; //七段数码管b亮
void qian() //前板主程序
{while (1) //循环
{ if(p37==0) //前端红外接收端接收到信号
{p25=0; //七段数码管c亮
p26=0;} //七段数码管b亮
else
{p25=1; //七段数码管c熄灭
p26=1;} //七段数码管b熄灭
if(p35==0) //前端左侧红外接收端接收到信号
{p20=0; } //前端左侧灯亮
else
{p20=1; } //前端左侧灯熄灭
if(p36==0) //前端左侧红外接收端接收到信号
{p07=0; } //前端右侧灯亮
else
{p07=1; } }} //前端右侧灯熄灭
(七)主程序
#include<reg51.h>
typedef unsigned int u16; //定义延时变量
sbit p00=P0^0; //左电机
sbit p01=P0^1; //左电机
sbit p02=P0^2; //右电机
sbit p03=P0^3; //右电机
sbit p37=P3^7; //前端红外
sbit p36=P3^6; //右端红外
sbit p35=P3^5; //左端红外
sbit p20=P2^0; //左端指示灯
sbit p07=P0^7; //右端指示灯
sbit p06=P0^6; //蜂鸣器
sbit p10=P1^0; //LED
sbit p11=P1^1; //LED
sbit p12=P1^2; //LED
sbit p13=P1^3; //LED
sbit p14=P1^4; //LED
sbit p15=P1^5; //LED
sbit p16=P1^6; //LED
sbit p17=P1^7; //LED
sbit p04=P0^4; //话筒
sbit p21=P2^1; //数码管
sbit p22=P2^2; //数码管
sbit p23=P2^3; //数码管
sbit p24=P2^4; //数码管
sbit p25=P2^5; //数码管
sbit p26=P2^6; //数码管
sbit p27=P2^7; //数码管
void delay(u16 i) //延时程序
{while(i--);} //i=1大约延时1us
void go() //前进
{p00=1;
p01=0;
p02=0;
p03=1;}
void right() //左拐
{p00=0;
p01=0;
p02=0;
p03=1;}
void left() //右拐
{p00=1;
p01=0;
p02=0;
p03=0;}
void back() //后退
{p00=0;
p01=1;
p02=1;
p03=0;}
void stop() //停止
{p00=0;
p01=0;
p02=0;
p03=0;}
void deng() //流水灯
{p10=0;
p11=0;
delay(5000);
p12=0;
p13=0;
delay(5000);
p14=0;
p15=0;
delay(5000);
p16=0;
p17=0;
delay(5000);
p17=1;
p16=1;
delay(5000);
p15=1;
p14=1;
delay(5000);
p13=1;
p12=1;
delay(5000);
p11=1;
p10=1;
delay(5000);}
void smgl() //数码管显示
{p27=0;
p26=0;
p25=0;
p24=0;
p21=0;
delay(50000);
delay(50000);
p27=1;
p26=1;
p25=1;
p24=1;
p21=1; //数码管显示‘3’
p27=0;
p26=0;
p24=0;
p23=0;
p21=0;
delay(50000);
delay(50000);
p27=1;
p26=1;
p24=1;
p23=1;
p21=1; //数码管显示‘2’
p25=0;
p26=0;
delay(50000);
delay(50000);
p25=1;
p26=1;} //数码管显示‘1’
void main() //主程序
{ bit s; //声控变量
if(p04==0)
{s=1;}
else{stop();} //声控启动
while(s)
{ deng();
if(p36==1&&p35==0) //左端检测到黑线,右拐,右端灯亮
{ left();
p20=1;
p07=0;}
if(p36==0&&p35==1) //右端检测到黑线,左拐,左端灯亮
{ right();
p07=1;
p20=0; }
if(p35==0&&p36==0) //左右同时检测到黑线,直走
{ go(); }
if(p35==1&&p36==1) //左右同时未检测到黑线,直走
{ go(); }
if(p37==0) //前端检测到障碍物
{p06=0; //蜂鸣器响
p07=1;
p20=1; //前板灯灭
delay(5000);
p06=1; //蜂鸣器不响
back(); //后退
smgl(); //数码管计时'3' '2' '1'
left(); //右拐
delay(50000);
delay(50000);
go();} }} //直行
说明:避障时,小车后退,蜂鸣器报警,数码管3秒倒计时同时进行,然后短时间右拐调整车头。下面是避障时实际的照片。 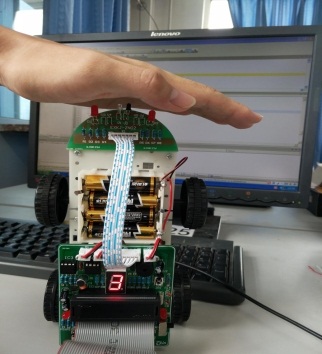
完整的Word格式文档51黑下载地址:
| 









 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

