初学PID的理论理解 要想真正掌握PID 还需要真正的实践
单回路:就是只有一个 PID 的调节系统。 串级:一个 PID 不够用怎么办?把两个 PID 串接起来,形成一个串级调节系统。又叫双 回路调节系统。 主调:串级系统中,要调节被调量的那个 PID 叫做主调。 副调:串级系统中,输出直接去指挥执行器动作的那个 PID 叫做副调 动态偏差:在调节过程中,被调量和设定值之间的偏差随时改变,任意时刻两者之间的 偏差叫做动态偏差 静态偏差:调解趋于稳定之后,被调量和设定值之间还存在的偏差叫做静态偏差。 回调:调节器调节作用显现,使得被调量开始由上升变为下降,或者由下降变为上升。 阶跃:被观察的曲线呈垂直上升或者下降,这种情况在异常情况下是存在的,比如人为 修改数值,或者短路开路。
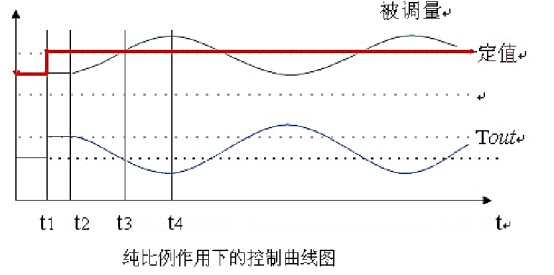
一、 P 纯比例作用趋势图的特征分析 一般来说,设定值不会经常改变,那就是说:当设定值不变的时候,调节器的输出只与被调量的波动有关。那么我们可以基本上得出如下一个概念性公式:
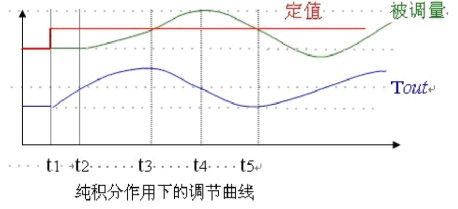
输出波动=被调量波动*比例增益 (注:当设定值不变) 结论:对于一个单回路调节系统,单纯的比例作用下,输出的波形与被调量的波形完全相似。 PS:输出量只与被调量的波动有关,因此,输出波形与被调量的波形完全相似。 推论: 1) 对于正作用的调节系统,顶点、谷底均发生在同一时刻。 2) 对于负作用的调节系统,被调量的顶点就是输出的谷底,谷底就是输出的顶点。 3) 对于正作用的调节系统,被调量的曲线上升,输出曲线就上升;被调量曲线下降, 输出曲线就下降。两者趋势完全一样。 4) 对于负作用的调节系统,被调量曲线和输出曲线相对。 波动周期完全一致。 5) 只要被调量变化,输出就变化;被调量不变化,不管静态偏差有多大,输出也不会变化 二、I 纯积分作用趋势图的特征分析 简述:如果调节器的输如偏差不等于零,就让调节器的输出按照一定的速度一直朝一个方向累加下去。(积分相当于一个斜率发生器。启动这个发生器的前提是调节器的输入偏差不等于零,斜率的大小与两个参数有关:输入偏差的大小、积分时间。) 总结: 1) 输出的升降与被调量的升降无关,与输入偏差的正负有关。(ps:PWM_X与X的增加或者减小无关,与X和Aim_X之间的偏差有关) 2) 输出的升降与被调量的大小无关。(ps:同上) 3) 输出的斜率与被调量的大小有关。 (X大的话 变化就相对大?) 4) 被调量不管怎么变化,输出始终不会出现阶跃扰动。(不管X怎么样变化,PWM_X不会出现阶跃变化,只能随时间累加或者累减) 5) 被调量达到顶点的时候,输出的变化趋势不变,速率开始减缓。(X的变化率为0,PWM_X变化最慢(PWM_X=750-Ki*error),即error变化最小,PWM_X变化最小) 6) 输出曲线达到顶点的时候,必然是输入偏差等于零的时候。(ps:error_X等于0,则输出变化率是0,即PWM_X变化率)
T1~t2 error不变,即输入偏差不变,所以输出以不变的速率上升,即呈线性上升,相对于时间进行累加,调节器的输出缓慢改变,导致被调量逐渐受到影响而改变,,至于斜率为正是因为被调量小于设定值,系统需要使输出增加。
T2~t3被调量开始变化时,error逐渐减小,输出的速率开始降低,随时间累计速度减小。
T3~t4,t3时刻,偏差为0时,输出不变,输出曲线为水平。然后偏差开始为正时,输出才开始降低,斜率是负,而且Tout的负斜率绝对值变大。
后面就不写了,一样。。。
三、D纯微分作用趋势图的特征分析 单纯的微分作用是不存在的。 概述:被调量不动,输出不动;被调量一动,输出马上跳变。 推论: 1) 微分作用与被调量的大小无关,与被调量的变化速率有关; (PWM_X与X的大小无关,之于X的变化率有关) 2) 与被调量的正负无关,与被调量的变化趋势有关;(X增加PWM_X减小,X减小PWM_X增大) 3) 如果被调量有一个阶跃,就相当于输入变化的速度无穷大,那么输出会直接到最小或者最大;(同上) 4) 微分参数 有的是一个,用微分时间表示。有的分为两个:微分增益和微分时间。微分增益表示输出波动的幅度,波动后还要输出回归,微分时间表示回归的快慢。见图, KD 是微分增益,TD 是微分时间。 5) 由第 4 条得出推论:波动调节之后,输出还会自动拐回头。
温习一下: 比例作用:输出与输入曲线相似。
积分作用:只要输入有偏差输出就变化。
微分作用:输入有抖动输出才变化,且会猛变化。
完整的Word格式文档51黑下载地址:
 PID学习笔记.docx
(191.19 KB, 下载次数: 23)
PID学习笔记.docx
(191.19 KB, 下载次数: 23)
| 









 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

