|
本文主要针对电机的转速进行测量,然后用数码管把电机的转速显示出来! 本装置主要有两部分构成。1光电测速部分。2测得的脉冲处理处理和显示部分! 光电测速部分主要由光电传感器构成!脉冲处理部分主要经施密特触发器对接收到的脉冲进行波形校正,由单片机的T1口输入,经80C51处理后显示输出电机的转速
下面我们来了解一下光电测速部分! 。 3、脉冲信号的获得
可以有多种方式来获得脉冲信号,这些方法有各自的应用场合。下面逐一进行分析。
3.1霍尔传感器
霍尔传感器是对磁敏感的传感元件,常用于开关信号采集的有CS3020、CS3040等,这种传感器是一个3端器件,外形与三极管相似,只要接上电源、地,即可工作,输出通常是集电极开路(OC)门输出,工作电压范围宽,使用非常方便。如图1所示是CS3020的外形图,将有字面对准自己,三根引脚从左向右分别是Vcc,地,输出。
 此主题相关图片如下:1.jpg

图1 CS3020外形图
使用霍尔传感器获得脉冲信号,其机械结构也可以做得较为简单,只要在转轴的圆周上粘上一粒磁钢,让霍尔开关靠近磁钢,就有信号输出,转轴旋转时,就会不断地产生脉冲信号输出。如果在圆周上粘上多粒磁钢,可以实现旋转一周,获得多个脉冲输出。在粘磁钢时要注意,霍尔传感器对磁场方向敏感,粘之前可以先手动接近一下传感器,如果没有信号输出,可以换一个方向再试。 这种传感器不怕灰尘、油污,在工业现场应用广泛。
3.2.光电传感器
光电传感器是应用非常广泛的一种器件,有各种各样的形式,如透射式、反射式等,基本的原理就是当发射管光照射到接收管时,接收管导通,反之关断。以透射式为例,如图2所示,当不透光的物体挡住发射与接收之间的间隙时,开关管关断,否则打开。为此,可以制作一个遮光叶片如图3所示,安装在转轴上,当扇叶经过时,产生脉冲信号。当叶片数较多时,旋转一周可以获得多个脉冲信号。

图2光电传感器的原理图
此主题相关图片如下:3.jpg

图3遮光叶片
3.3.光电编码器
光电编码器的工作原理与光电传感器一样,不过它已将光电传感器、电子电路、码盘等做成一个整体,只要用连轴器将光电传感器的轴与转轴相连,就能获得多种输出信号。它广泛应用于数控机床、回转台、伺服传动、机器人、雷达、军事目标测定等需要检测角度的装置和设备中。如图4所示,是某光电编码器的外形。
此主题相关图片如下:4.jpg

图4 成品光电编码器 这次课设我选的是光电传感器,采用穿透法测量电机转速。光电传感器的原理上面有详细的介绍。 当不透光的物体挡住发射与接收之间的间隙时,开关管关断,否则打开。为此,可以制作一个遮光叶片如图3所示,安装在转轴上,当扇叶经过时,产生脉冲信号。当叶片数较多时,旋转一周可以获得多个脉冲信号。 这里我们才用转10个孔的方式!在一分钟的时间内,假如产生了10000脉冲,则电机的转速就为1000r/min. 4、硬件连接
测速的方法决定了测速信号的硬件连接,测速实际上就是测频,因此,频率测量的一些原则同样适用于测速。
通常,可以用计数法、测脉宽法和等精度法来进行测试。所谓计数法,就是给定一个闸门时间,在闸门时间内计数输入的脉冲个数;测脉宽法是利用待测信号的脉宽来控制计数门,对一个高精度的高频计数信号进行计数。由于闸门与被测信号不能同步,因此,这两种方法都存在±1误差的问题,第一种方法适用于信号频率高时使用,第二种方法则在信号频率低时使用。等精度法则对高、低频信号都有很好的适应性。
这里为简化讨论,仅采用计数法来进行测试。
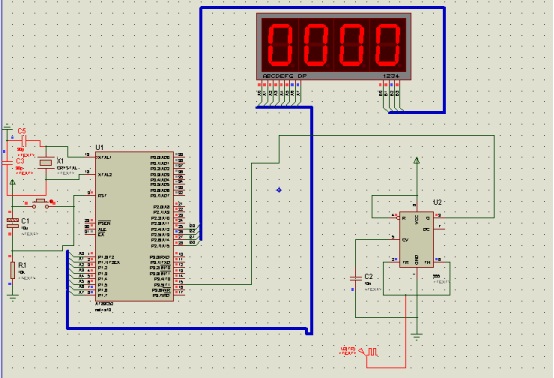
如上图:因为光电传感器不好仿真,这里我们采用了555芯片构成一个施密特触发器,由光电传感器得到的脉冲由2,5脚输入,经3脚输出接到单片机的T1(P3.5).。经89C51编程处理后由P1口输出通过数码管显示出转速! 5、实验程序及分析
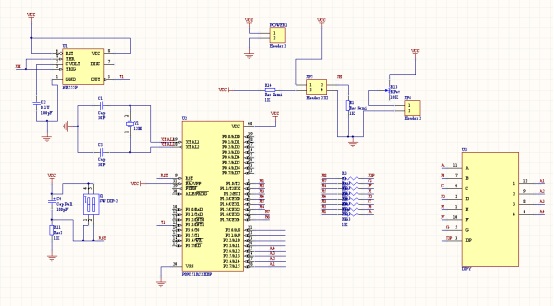
测量转速,使用光电传感器,被测电机带动纸片旋转,我们在纸片上开了10小孔,电机每旋转一周就会产生10个脉冲,产生12个脉冲,要求将转速值(转/分)显示在数码管上。 实验程序如下: 6.软件仿真: 如上图:光电传感器测得脉冲由555的2或5脚输入,由555的三脚输出,接入AT9C51的P3.5口。P2.4---P2.7为数码管的位选端口,p1为数据端口。 7.用protel DXP画出原理图如下: 8、根据原理图得到的PCB:
9、硬件调试结果: 这次设计,主要对电机进行测速,在电机的码盘上转了10个孔, 没10ms 对电机测量一次转速!由于工具不太足,做硬件的时候遇到了不少的困难! 总体来说能够实现其基本功能!电机转速700---1500r/min.
以上的Word格式文档51黑下载地址:
| 



 [复制链接]
[复制链接]








 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

