包含LCD1602显示,串口发送接收,完美实现。
文档内容齐全,包含使用说明,相关驱动等。
解决了STM32的Proteus串口收发问题。 注意:每输入一个字符后,要按一次“手动发送”按钮,才能收到正确字符。
仿真原理图如下(proteus仿真工程文件可到本帖附件中下载)

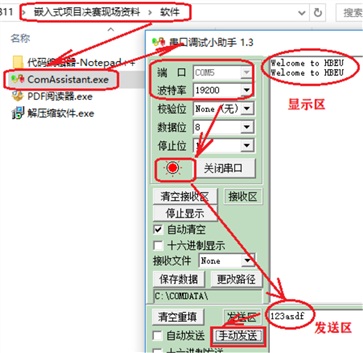
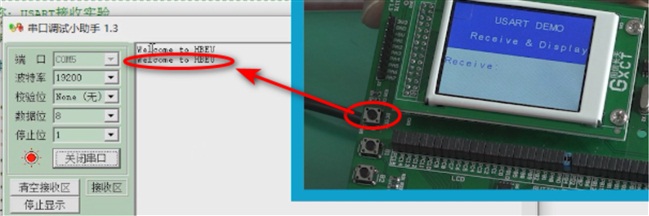
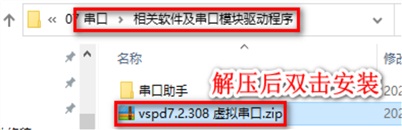
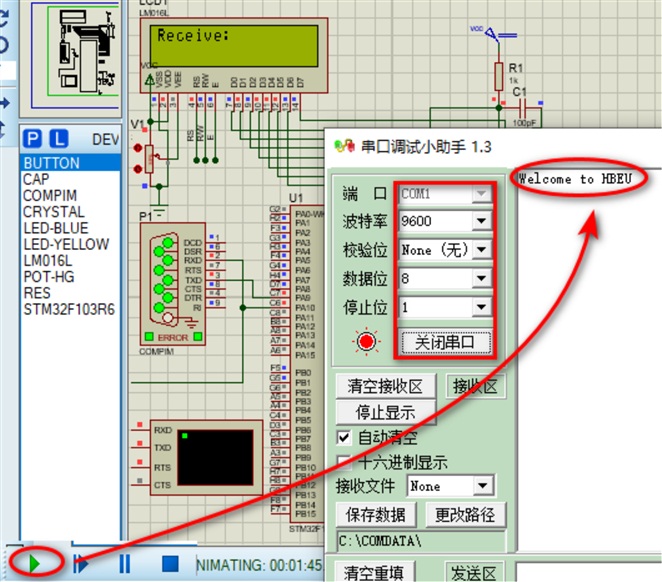
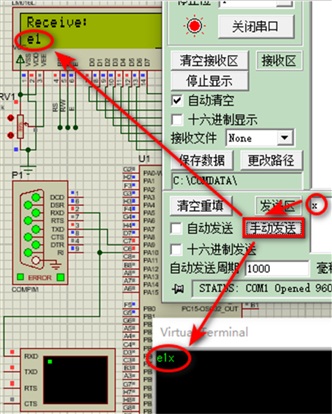
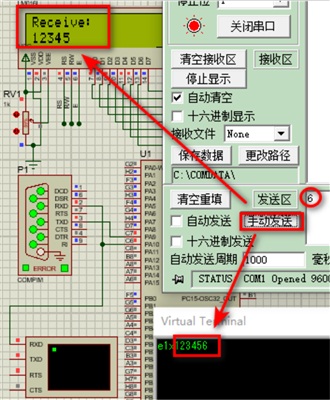
Proteus的串口仿真打开串口调试助手,如图11-30所示。进入串口调试助手后,需要设置相关参数,串口号为图11-29所查到的端口号,其他参数根据实际程序来确定。打开串口后,按开发板上的reset按键,显示区就能接收到从开发板发送过来的“Welcome to HBEU”,每按复位键一次,就会接收一次,如图11-31所示;在发送区输入字符,如图11-32所示,点击“手动发送”,开发板上就能收到对应的字符,根据要求,不是以“x”结束的字符串,当超过20个字符后也接收到字符串。 图11-29 查看串口号 在Proteus中仿真串口时,先安装“虚拟串口”驱动,如图11-33所示,安装完之后也可以查看虚拟串口的端口号,查看方法与图11-29一致。在串口助手中设置好串口参数后,按Proteus中运行按钮,也可以在串口助手收到信息,如图11-34所示,注意串口波特率。 图11-30 串口助手 图11-31 STM32发送数据 图11-32 STM32串口接收数据 图11-33 虚拟串口驱动文件 图11-34 Proteus仿真串口接收数据 由于Proteus没有对stm32的时钟树做仿真模型,只固定了一套时钟值,可以用GETSYS/HCLK/PCLK函数看。Proteus不是实时仿真,所以串口速率不是硬件速率对应的值,可能更高,可能更低,好在Proteus的虚拟终端是可以输入非标准波特率的,推荐波特率设为9600bit/s。另外,在Proteus仿真的程序中加了一条语句: RCC_SYSCLKConfig(RCC_SYSCLKSource_HSI); 若没有该系统配置语句,则看不到仿真效果。仿真时钟跟实际时钟存在一定的延时误差,在上位机发送数据时,一次发送一个字符串时,接收会出现乱码,因此需要一个一个字符发送,如图11-35所示,在发送区依次输入“e1x”之后(注意:每输入一个字符后,要按一次“手动发送”按钮),虚拟终端(Virtual Terminal)会显示所发送的所有字符,当STM32的串口接收到字符“x”后,表示结束,在LCD屏上显示“e1”。 为了接收方便,将最多发送20个字符改为最多发送5个字符,当我们依次输入“123456”后(注意:每输入一个字符后,要按一次“手动发送”按钮),LCD显示收到的字符串“12345”,如图11-36所示。 图11-35 STM32串口遇到“x”结束接收 图11-36 STM32串口收到6个字符自动结束
单片机main文件源代码:
- #include "stm32f10x.h"
- #include "stdio.h"
- //#include "led.h"
- #include "delay.h"
- #include "lcd1602.h"
- uint8_t USART_RXBUF[5];
- extern uint8_t RXOVER;
- /* Private function prototypes -----------------------------------------------*/
- void NVIC_Configuration(void);
- //void Delay_Ms(uint32_t nTime);
- void USART_Config(void);
- //void USART_SendString(int8_t *str);
- void USART_SendString(unsigned char *buf);
- int main(void)
- {
- uint8_t i;
- RCC_SYSCLKConfig(RCC_SYSCLKSource_HSI);
- //SysTick_Init();
- SysTick_Config(SystemCoreClock/100000);
- GPIO_Configuration();
- LCD1602_Init();
-
- LCD1602_Show_Str(0,0,"Receive:");
- USART_Config();
- //USART_SendString(Tx_Buf);//发送字符串
- USART_SendString("Welcome to HBEU\r\n");//发送字符串
- while(1)
- {
- if(RXOVER == 1){
- LCD1602_Show_Str(0,2,USART_RXBUF);
-
- for(i=0;i<5;i++){
- USART_RXBUF[i] =' '; //清空接收区
- }
- RXOVER = 0;
- USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);/////////////////////////////////////////////////////////////
- }
-
- /*if(USART_GetFlagStatus(USART1,USART_IT_RXNE)==SET)
- {
- USART_SendData(USART1,USART_ReceiveData(USART1));
- delay_ms(1000);
- }*/
-
- }
- }
- /*void USART_Config(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- USART_InitTypeDef USART_InitStructure;
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA,ENABLE);
- //RCC_APB1PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);
-
- //NVIC_Configuration();
- //配置USART2 TX引脚工作模式
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
- //配置USART2 RX引脚工作模式
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
- //串口2工作模式配置
- USART_InitStructure.USART_BaudRate = 9600;
- USART_InitStructure.USART_WordLength = USART_WordLength_8b;
- USART_InitStructure.USART_StopBits = USART_StopBits_1;
- USART_InitStructure.USART_Parity = USART_Parity_No ;
- USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
- USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
- USART_Init(USART1, &USART_InitStructure);
-
- //USART_ITConfig(USART2,USART_IT_RXNE,ENABLE);
- USART_Cmd(USART1, ENABLE);
- }*/
- void USART_Config(void)
- {
- GPIO_InitTypeDef GPIO_InitStructure;
- USART_InitTypeDef USART_InitStructure;
- // 打开串口GPIO的时钟
- //DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);
-
- // 打开串口外设的时钟
- //DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
- NVIC_Configuration();
- // 将USART Tx的GPIO配置为推挽复用模式
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
- // 将USART Rx的GPIO配置为浮空输入模式
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
-
- // 配置串口的工作参数
- // 配置波特率
- USART_InitStructure.USART_BaudRate = 9600;
- // 配置 针数据字长
- USART_InitStructure.USART_WordLength = USART_WordLength_8b;
- // 配置停止位
- USART_InitStructure.USART_StopBits = USART_StopBits_1;
- // 配置校验位
- USART_InitStructure.USART_Parity = USART_Parity_No ;
- // 配置硬件流控制
- USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
- // 配置工作模式,收发一起
- USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
- // 完成串口的初始化配置
- USART_Init(USART1, &USART_InitStructure);
- // 使能串口
- USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
- USART_Cmd(USART1, ENABLE);
- }
- /**
- * @说明 USART2字符串发送函数
- * @参数 str: 指向字符串的指针
- * @返回值 None
- */
- /*void USART_SendString(int8_t *str)
- {
- uint8_t index = 0;
- do
- {
- USART_SendData(USART1,str[index]);
- while(USART_GetFlagStatus(USART1,USART_FLAG_TXE) == RESET);
- index++;
- }
- while(str[index] != 0); //检查字符串结束标志
- }*/
- void USART_SendString(unsigned char *buf)
- {
- while (*buf != '\0')
- {
- while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
- USART_SendData(USART1, *buf++);
- }
- }
- /**
- * @说明 配置中断向量控制器
- * @参数 None
- * @返回值 None
- */
- void NVIC_Configuration(void)
- {
- NVIC_InitTypeDef NVIC_InitStructure;
- NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
- /* Enable the RTC Interrupt */
- NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
- NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
- NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
- NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
- NVIC_Init(&NVIC_InitStructure);
- }
 资料.7z
(7.93 MB, 下载次数: 476)
资料.7z
(7.93 MB, 下载次数: 476)
| 



 [复制链接]
[复制链接]







 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩



