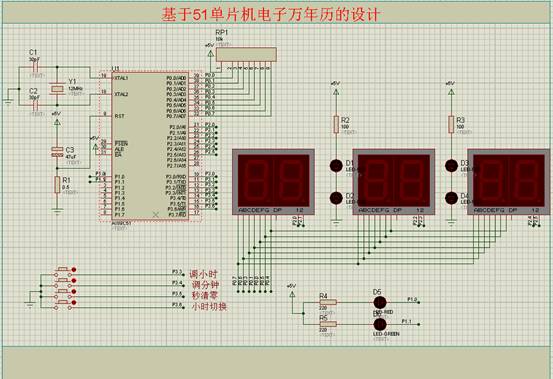
仿真原理图如下(proteus仿真工程文件可到本帖附件中下载)

Proteus仿真操作流如下:
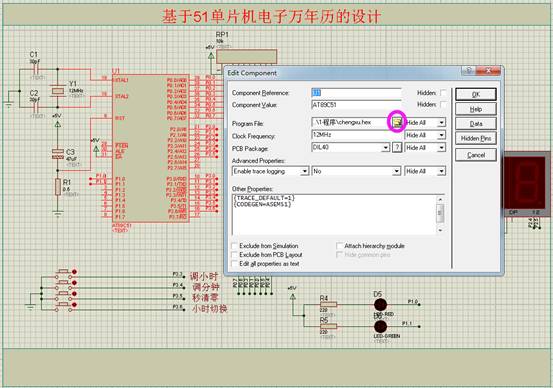
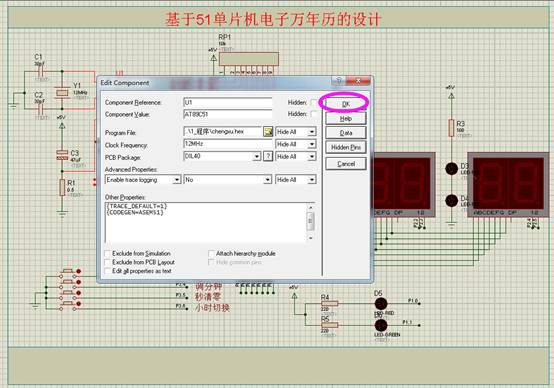
步骤一:打开仿真.DSN文件  (用Proteus7.8打开) 步骤二:左键双击U1单片机,打开加载HEX文件界面,左键单击文件夹图标
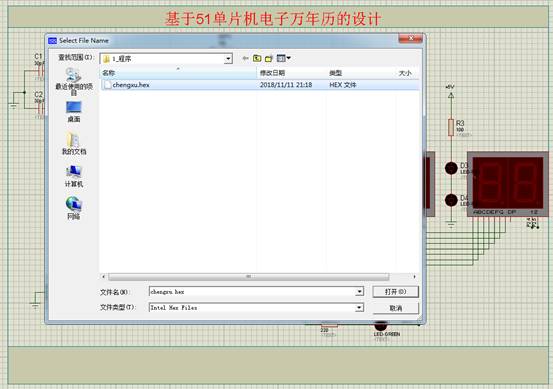
步骤三:选择给的1号源程序文件夹,找到HEX文件。 步骤四:左键双击打开HEX文件,跳到步骤二界面,点击OK
步骤五:左键点击左下角运行 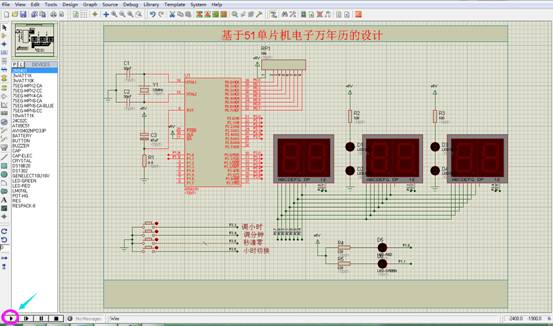
单片机源程序如下:
- #include<reg52.h>
- #include<stdio.h>
- #include<intrins.h>
- #define uchar unsigned char
- #define uint unsigned int
- sbit RS = P2^4;//1602数据/命令选择端(H:数据寄存器L:指令寄存器)
- sbit RW = P2^5;//1602读/写选择端
- sbit E = P2^6;//1602使能信号端
- sbit key1=P3^0;//用户按键
- sbit key2=P3^1;
- sbit key3=P3^2;
- sbit key4=P3^3;
- sbit key5=P3^4;
- uchar code B_Rotation[8]={0x7f,0x3f,0xbf,0x9f,0xdf,0xcf,0xef,0x6f}; //反转表格
- uchar code F_Rotation[8]={0xef,0xcf,0xdf,0x9f,0xbf,0x3f,0x7f,0x6f}; //正转表格
- uchar table1[]="dir: + spe:005";
- uchar table2[]="cir:000 ang:000";
- uchar num;
- uint key,flag,speed=5,zflag,znum,fflag,fnum,select,pp,qq;
- //1键值2键值标志3速度4正转标志5正转圈数6反转标志7反转圈数8正转角度9反转角度10选择
- float zang,fang;
- /******************************************************************/
- /* 延时函数 Xms */
- /******************************************************************/
- void delay(uint z)
- {
- uint x,y;
- for(x=z;x>0;x--)
- for(y=110;y>0;y--);
- }
- /******************************************************************/
- /* LCD1602写命令操作 */
- /******************************************************************/
- void WriteCommand(uchar com)
- {
- delay(5);//操作前短暂延时,保证信号稳定
- E=0;
- RS=0;
- RW=0;
- P0=com;
- E=1;
- delay(5);
- E=0;
- }
- /******************************************************************/
- /* LCD1602写数据操作 */
- /******************************************************************/
- void WriteData(uchar dat)
- {
- delay(5); //操作前短暂延时,保证信号稳定
- E=0;
- RS=1;
- RW=0;
- P0=dat;
- E=1;
- delay(5);
- E=0;
- }
- /******************************************************************/
- /* 1602初始化程序 */
- /******************************************************************/
- void InitLcd()//1602初始化程序
- {
- delay(15);
- WriteCommand(0x38); //display mode
- WriteCommand(0x38); //display mode
- WriteCommand(0x38); //display mode
- WriteCommand(0x06); //当读或写一个字符后地址指针加一,且光标加一
- WriteCommand(0x0c); //显示开及光标不显示
- WriteCommand(0x01); //清屏
- WriteCommand(0x80);
- for(num=0;num<15;num++)//第一行的显示
- {
- WriteData(table1[num]);
- delay(15);
- }
- WriteCommand(0x80+0x40);//第二行的显示
- for(num=0;num<15;num++)
- {
- WriteData(table2[num]);
- delay(15);
- }
- }
- /******************************************************************/
- /* 独立键盘扫描函数 */
- /******************************************************************/
- void keyscan()
- {
-
- P3=0xff;//拉高P3口,以读取P3口的值
- if(key1==0)//键1被按下
- {
- delay(5);//延时消抖
- if(key1==0)
- {
- flag=1;
- }
- while(!key1);
- delay(5);//延时消抖
- while(!key1);//松手检测
- }
- if(key2==0)
- {
- delay(5);
- if(key2==0)
- {
- flag=2;
- }
- while(!key2);
- delay(5);
- while(!key2);
- }
- if(key3==0)//键1被按下
- {
- delay(5);//延时消抖
- if(key3==0)
- {
- flag=3;
- }
- while(!key3);
- delay(5);//延时消抖
- while(!key3);//松手检测
- }
- if(key4==0)
- {
- delay(5);
- if(key4==0)
- {
- flag=4;
- }
- while(!key4);
- delay(5);
- while(!key4);
- }
- if(key5==0)
- {
- delay(5);
- if(key5==0)
- {
- flag=5;
- }
- while(!key5);
- delay(5);
- while(!key5);
- }
- }
- /******************************************************************/
- /* 1602显示3位数 */
- /******************************************************************/
- void write_sfm(uchar add,uint date)//1602显示
- {
- uchar bai,shi,ge;
- bai=date/100;
- shi=date%100/10;
- ge=date%10;
- WriteCommand(0x80+add);//设置数据地址指针
- WriteData(0x30+bai);
- WriteData(0x30+shi);
- WriteData(0x30+ge);
- WriteData(0x20);
- }
- /******************************************************************/
- /* 键值处理 */
- /******************************************************************/
- void handle_flag()
- {
- uchar select1;
- if(TR0==0&&TR1==0)
- {
- if(flag==1) //正转
- {
- WriteCommand(0x80+0x05);
- WriteData('+');
- delay(20);
- select=0;
- }
- if(flag==2) //反转
- {
- WriteCommand(0x80+0x05);
- WriteData('-');
- delay(20);
- select=1;
- }
- if(flag==3)//转速加
- {
- speed++;
- if(speed>=12)
- speed=12;
- write_sfm(0x0c,speed);//显示速度
- delay(20);
- }
- if(flag==4) //转速减
- {
- speed--;
- if(speed<=1)
- speed=1;
- write_sfm(0x0c,speed);//显示速度
- delay(20);
- }
- }
- if(flag==5)////关闭中断,停止电机
- {
- select1++;
- select1%=2;
- if( select1==0)
- {
- TR0=0;
- TR1=0;
- if(select==0)//显示转动的角度
- write_sfm(0x40+0x0c,zang);
- else
- write_sfm(0x40+0x0c,fang);
- }
- else
- {if(select==0)
- {
- TR0=1;//开定时器0,产生正转相序
- TR1=0;//关定时器1
- }
- else
- {
- TR1=1;//开定时器1,产生反转相序
- TR0=0;//关定时器0
- }
- }
- }
- flag=0;
- }
- void main()
- {
-
- pp=0;
- qq=0;
-
- InitLcd();
- TMOD=0x11;
- EA=1;
- ET0=1;
- ET1=1;
- TH0=(65536-(14648/speed))/256;
- TL0=(65536-(14648/speed))%256;
- TH1=(65536-(14648/speed))/256;
- TL1=(65536-(14648/speed))%256;
- TR0=0;
- TR1=0;
-
- while(1)
- {
- keyscan();
- handle_flag();
- }
- }
- void time0() interrupt 1
- {
- uint zz;
- TH0=(65536-(14648/speed))/256; // 360/(5.625/64)=4096
- //假设60秒转一圈,即60秒中断4096次,
- //那么一次中断需要60000000/4096=14648个时钟
- //60000000/(4096*speed) zflag=4096时一圈
- TL0=(65536-(14648/speed))%256;
- zz%=8;
- P1=F_Rotation[zz]; //输出对应的相
- zz++;
- zflag++;
- if(zflag==4096) //正转了一圈
- {
- zflag=0;
- znum++;
- write_sfm(0x40+0x04,znum);
- }
- if(zflag%64==0)//计算正转动的角度
- {
- pp++;
- zang=(uint)(pp*5.625);
- if(zang==360)
- pp=0;
- write_sfm(0x40+0x0c,zang);
- }
- //zang=0.088*zflag;
- //write_sfm(0x40+0x0c,zang);
- }
- void time1() interrupt 3
- {
-
- uint ff;
- TH1=(65536-(14648/speed))/256;
- TL1=(65536-(14648/speed))%256;
- ff%=8;
- P1=B_Rotation[ff]; //输出对应的相
- ff++;
- fflag++;
- if(fflag==4096) //反转了一圈
- {
- fflag=0;
- fnum++;
- write_sfm(0x40+0x04,fnum);
- }
- if(fflag%64==0)//计算反转动的角度
- {
- qq++;
- fang=(uint)(qq*5.625);
- if(fang==360)
- qq=0;
- write_sfm(0x40+0x0c,fang);
- }
- }
Keil4代码与Proteus7.5,8.8仿真下载:
 资料.7z
(388.36 KB, 下载次数: 166)
资料.7z
(388.36 KB, 下载次数: 166)
|









 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩



