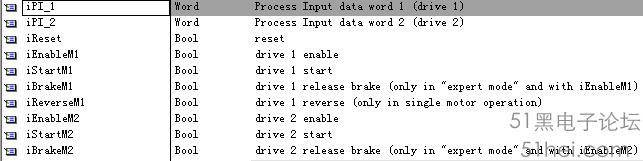
IN
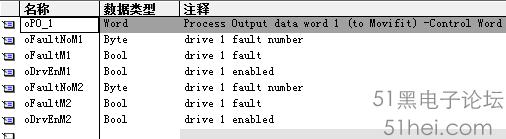
OUT
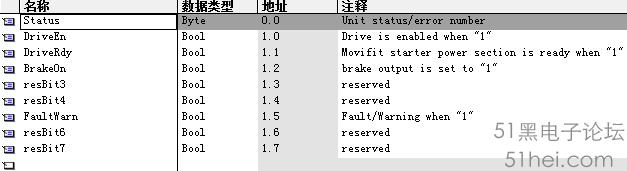
状态字1
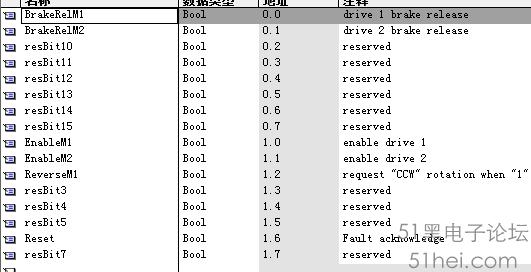
控制字1
---------------------------------------中文-------------------------------------
注意:兼容两个或三个过程数据字
PI1: 状态字 1
PI2: 状态字 2
Bit5 : 错误/警告 ="1"
Bit8-15: 错误位
错误码:
07 - 中间电路电压高
08 - 无监测错误
90 - 马达-变频器不匹配
17-24, 37 - CPU 错误
25, 94 - EEPROM错误
01 - 输出过程过电流
11 - 输出过程温度过高
84 - 马达温度过高
马达-变频器不匹配
89 - 温度保护开关
马达-变频器不匹配
06 - 相位错误
PO1: 控制字
--------------------------------------English-----------------------------------
note: compatible with 2 process data words (1PO/2PI)
PI1: Status word 1 (drive 1)
PI2: Status word 2 (drive 2)
Bit5 : Fault/Warning ="1"
Bit8-15: Fault number
Fault code:
07 - INTERMEDIATE CIRCUIT TENSION TO HIGH
08 - FAULT N-MONITORING
90 - ALLOCATION MOTOR-INVERTER WRONG
17-24, 37 - CPU FAULT
25, 94 - EEPROM-FAULT
01 - OUTPUT STAGE OVERCURRENT
11 - OUTPUT STAGE OVERTEMPERATURE
84 - OVERTEMPERATURE MOTOR
ALLOCATION MOTOR-INVERTER WRONG
89 - OVERTEMPERATURE BRAKE
ALLOCATION MOTOR-INVERTER WRONG
06 - NET-PHASEFAILURE
PO1: CONTROL WORD
网段:
LAR1 P##_PI1_StatWord1 // copy status words into local variables
L #iPI_1
T LW [AR1,P#0.0]
LAR1 P##_PI2_StatWord2
L #iPI_2
T LW [AR1,P#0.0]
L W#16#0 // zeroes temporary variables
LAR1 P##_PO1_CtrlWord
T LW [AR1,P#0.0]
//;
A #iEnableM1 // check preconditions to enable drive
AN #_PI1_StatWord1.FaultWarn
= #_PreconOK_M1
A #iEnableM2 // check preconditions to enable drive
AN #_PI2_StatWord2.FaultWarn
= #_PreconOK_M2
//;
//;
A #_PreconOK_M1
A #iStartM1
= #_PO1_CtrlWord.EnableM1 // enable drive 1
A #iReverseM1
= #_PO1_CtrlWord.ReverseM1 // enable drive 1 "CCW"
A #_PreconOK_M2
A #iStartM2
= #_PO1_CtrlWord.EnableM2 // enable drive 2
//;
//;
A #iReset
= #_PO1_CtrlWord.Reset
//;
//;
A #iBrakeM1
A #_PreconOK_M1
= #_PO1_CtrlWord.BrakeRelM1
A #iBrakeM2
A #_PreconOK_M2
= #_PO1_CtrlWord.BrakeRelM2
//;
//;
A #_PI1_StatWord1.DriveEn
A #_PI1_StatWord1.DriveRdy
AN #_PI1_StatWord1.FaultWarn
= #oDrvEnM1 // drive enable indicator
A #_PI2_StatWord2.DriveEn
A #_PI2_StatWord2.DriveRdy
AN #_PI2_StatWord2.FaultWarn
= #oDrvEnM2 // drive enable indicator
L #_PI1_StatWord1.Status
L 0
==I
A #iEnableM1
AN #_PI1_StatWord1.DriveRdy
= #_24V_Operation // 24V operation (maintanence switch off)
A #_PI1_StatWord1.FaultWarn // drive fault indicator
O #_24V_Operation // 24V operation (maintanence switch off)
= #oFaultM1
A #_PI2_StatWord2.FaultWarn // drive fault indicator
O #_24V_Operation // 24V operation (maintanence switch off)
= #oFaultM2
A #oFaultM1
JCN NFL1
L #_PI1_StatWord1.Status
JU SFL1
NFL1: L 0
SFL1: T #oFaultNoM1
A #oFaultM2
JCN NFL2
L #_PI2_StatWord2.Status
JU SFL2
NFL2: L 0
SFL2: T #oFaultNoM2
//;
//;
LAR1 P##_PO1_CtrlWord // copy local variables into function outputs
L LW [AR1,P#0.0]
T #oPO_1
SET
SAVE
//;
|






