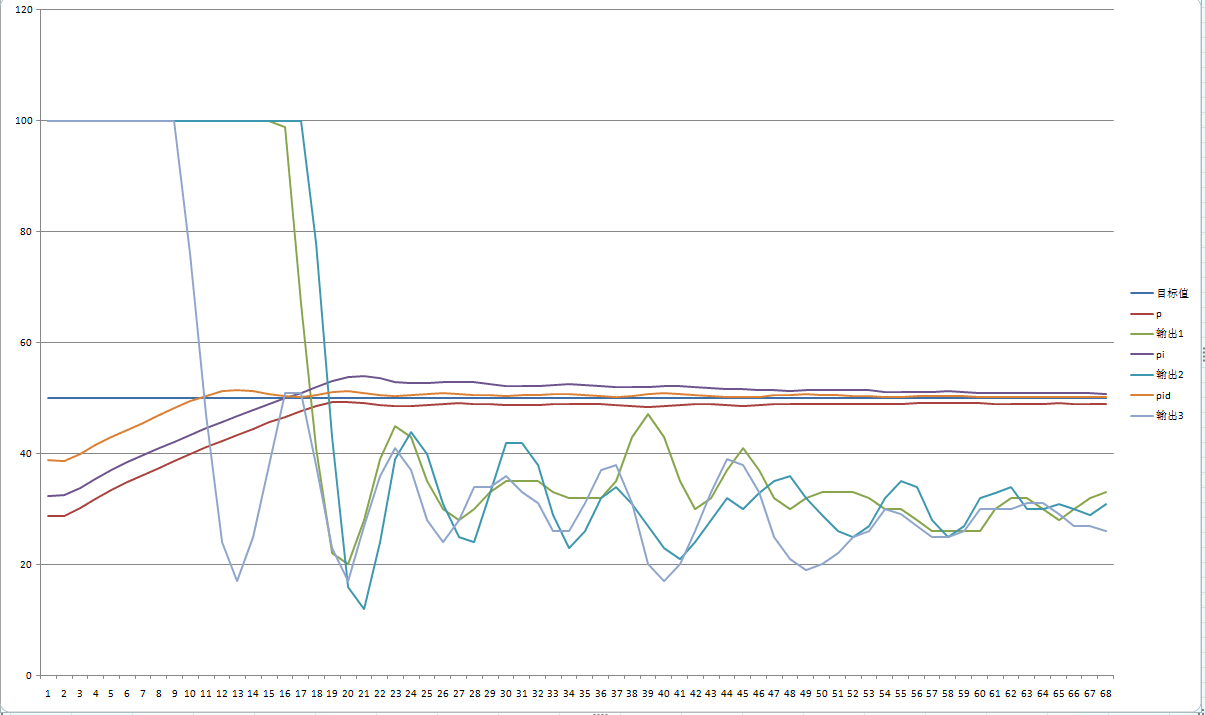
如上图,无论是P还是PI控制都不可以使得和目标接近只有PID三个才可以使得它距离目标最近。
1、PID 简介
PID = [ Kp*e(t)] + [Ki*∫(0-t)e(τ)dτ] + [Kd*de(t)/dt]
1.1、比例项
Pout = [ Kp*e(t)]
令x=e(t)则函数y=f(x)的形式f的取值为一个固定的数值,这样在数轴上将会是一条固定斜率K的线。
他同步反映了自变量x的走向,f则成为走向的增益。也就是Kp,因为成线性成比例所以叫做比例项。
增益的大小决定了输出的值的大小。增益大输出值偏大,增益小输出值偏小。
比例是误差的对当前对当前进行影响结果就是曲线是震荡的,系数越大震荡的越剧烈。反之
1.2、积分项:
Iout =[Ki*∫(0-t)e(τ)dτ]
积分的概念好早就在学习,有过许多次的尝试和请教,直到现在才逐渐的清晰起来,
必须从实际出发去着手理解,单纯的看公式很难理解,因为毕竟我文化知识是个槛
首先我明确了积分是用来计算不规则曲线所包围的面积的。
然后明确第二个概念是类似割圆术的,把她包围的面积分解成小块也就是所谓的dt
再有明确第三个概念就是极限的概念,早在数年前W生的高数书里面有看过lim->x,但是没有明白是什么意思,事实上所谓的极限是无限接近而不等于的那个值。
积分里面就是相邻的dt->0也就是说小到线变成了点,点和点的距离很小很小。这时候在两点之的x,y坐标就是个矩形,就可以计算矩形的面积L*H然后一直加下去。
最后把所有的面积求和就得到了不规则曲线包围的面积了。
之前请教过J和W 代数式的含义现在可以解释上面的公式了,
∫(0-t)e(τ)dτ 0-t 表示X轴的时间坐标0-t这区间内,e(τ) 首先是 τ在区间0-t上,那么e(τ)就代表了在τ时间内的误差值,散点定义在纵坐标上
这个e(τ)不一定是个线性,完全可能是个不规则的函数,然后dτ是对0-t之间的分成的份数,也就是dτ=t/lim->0,那么也就是在横坐标的值,
他们之间的乘积就是那e(τ)*dt所包围的一小块的面积。前面的积分∫(0-t)我的理解可以等价于求和运算,将0-t区间内所有的e(τ)*dt小块加起来,
那么他们的面积就应该是e(τ)在区间0-t之内的面积了。显然她的值是随着时间t增加而增加。数学上的dt->0在实际上是不可能的所以这就牵扯到dt的粒度,
dt粒度约小则e(τ)包围的面积计算的约接近真实的值也大,反之粗略并值也相对小。事实上数学上的dt时间就是实际进行运算的频率罢了。
最后一个就是Ki这个是积分的增益。显然它越大则定积分所产生的值成倍数的增加,越小则积分值成倍的减小。
抛开Ki不看的话就是采样计算时间内计算的面积之和,他需要时间去累计,输出值看加入积分后结果增大,但是比纯比例要稳定了。
积分是记录了误差的过去。会使的系统变得很稳定。但是还是会在目标值上下轻微的震荡。
1.3、微分项:
Dout = [Kd*de(t)/dt]
微分的概念一直不理解,他们总是灌输导数的概念,而我不能理解什么叫做导数。彻底的不理解。直到百度发现导数斜率,斜率我是知道的。
相应的微分的概念也要从实际出发。但是不像积分可以理解为不规则曲线的包围面积,微分却无法理解什么是需要微分的。
直到f的出现讲到切线的概念。和直线的切线就是其本身。在加上之前的积分的dt概念所以得以继续
任意一条不规则的线段,对其分割位无数份limx->0 ,那么又回到了和积分一样的概念上每一份都变成了点,他们挨得很近。他们彼此的连线变成了规则的线。
宏观上他们是不规则的线。微观上他们点和点之间是规则的线。那么两点之间的连线和X轴的夹角就是斜率了。
Kd就是微分增益控制,越大则微分值成倍提高,减小则微分值减小。对结果的影响小。
微分是对误差未来走向,相当于有一定的提前量和预测性。会减小积分带来的震荡。使曲线输出趋于平滑并等于设定值。
1.4、参数整定
参数整定就是对Kp\Ki\Kd进行配置。
第一种方法
调整比例其他参数=0
先对比例进行整定,逐渐的增加Kp并使得输出曲线接近目标值,
此时关注开始的一个阶段它的上升曲线比较陡,之后接着是震荡,然后越来越小,后半部分呈现出纹波的形状,
证明她正在震荡,这种震荡可以查看输出驱动曲线可以明显的显现出来。我的整定是整定到离目标值约1-0.5左右。
此时再进行积分的整定保持比例不变的前提。开始增加积分值。此时发现曲线在开始的时候震荡的很大,
超过比例的一大截。这是正常的,因为积分项的引入值变大了,输出对应的变大了,这样相当于开始的比例上抬了,所以震荡会加剧,
调整的同时看后半部分的曲线是否接近目标,会发现真的很稳定并且在目标值以内0.5左右。偶尔会超过1,这时就应该停止整定
最后进行微分的整定。保持比例微分不变的前提条件,逐渐的增加微分值,然后使开始的比较的大的震荡曲线减小到目标值左右,
比如以50为目标则原来在PI条件下峰值可以达到52,那么调整微分使她慢慢回落到50左右。不足达不到就慢慢的增加微分系数,直到达到之后。
停止所有的整定工作。保存KP KI KD的值。并写入到PID中。
第二种方法
就是 齐格勒-尼克尔斯 整定。目前不用不做学习了。
1.5、微积分的时间dt
微积分的时间dt是微分和积分共同使用的粒度,它是X坐标的T时间,转换为运算就是运算的频率。单位是秒。这个需要根据对象的属性进行调整。
温度这种滞后的向大了调整,电机伺服这种要小才能跟上。 为系统选择一个合适的微积分时间。给积分器和微分器提供计算基准是必须的。
1.6、输出推动
按照0-100%输出推动执行器件即可。做好上下限的窗口。没有什么特殊要求的情况下是这样。
by 老王
|









 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩


