|
基于MATLAB的锁相环电路设计 李*侬 (德州学院 物理与电子信息学院 山东德州253023) 摘要:本设计在研究锁相环电路的基础上,对锁相系统的基本工作原理进行了分析,以传统模拟锁相环的结构为基础,分析了锁相环的数学模型,详细描述了锁相环的整体描述以及鉴相器、环路滤波器、压控振荡器等电路模块。并以此为出发点,对锁相环的锁定性能及稳定性能等各种性能进行了分析。在分析设计的同时,采用MATLAB软件对锁相环电路进行了仿真。首先分析了一阶锁相环和二阶锁相环的锁定性能,并进行了比较。其次分析了阻尼系数对环路稳定性的影响。最后介绍了锁相环的调制作用。从锁相环的仿真结果可知,理论研究结果与实验结果相符,锁相环电路达到了设计指标要求。
目录 摘要及关键词 1 1 绪论 1 1.1课题背景及其研究意义 1 1.2锁相环的应用 2 2 锁相环理论 2 2.1基本理论 2 2.2基本模块 3 2.3环路的相位模型及其基本方程 8 2.4环路性能 8 3 锁相环仿真 11 3.1锁定性能 11 3.2环路性能 13 3.3稳定性能 17 3.4调制作用 18 4 结论 20 参考文献 21 致谢 23 附录 24
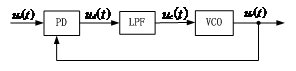
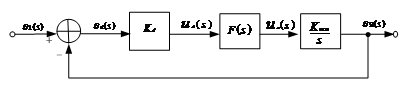
1 绪论 1.1 课题背景及其研究意义 在现代集成电路中,锁相环是一种广泛应用于模拟、数字及其数模混合电路系统中的非常重要的电路模块。该模块用于完成两个信号相位同步的自动控制,即为锁相。它是一个闭环自动控制系统,它将自动频率控制和自动相位控制技术进行了融合之,是我们世界的其中一部分有序化,其输出信号可自动的跟踪系统,并能自动跟踪两个信号的相位差,且依靠反馈控制,以此达到自动调节输出信号相位的目的。该原理在上世纪30年代无线电技术发展的初期阶段便已出现,时至今日,其已逐步渗透到各个领域之中。伴随着空间技术的出现,锁相技术大力发展开来,应用范围大大的拓宽。锁相环在通信和数字系统中可以用作时钟恢复电路;在无线通信系统与电视中可用作频率合成器来选择不同的频道。总之,PLL已成为许多电子系统的核心部分[1]。 一般来说,锁相环可分为四类a. 模拟锁相环 b.数字锁相环c.混合锁相环d.程序锁相环。 锁相环电路从简单的模拟电路发展到数模混合电路和全数字电路,由二阶发展到三阶和更高阶。其属于闭环相位自动控制系统,具有独特的窄带跟踪性能。既能跟踪输入信号,又能对输入噪声进行窄带滤波。长此以来,锁相环一直是相位相干通信系统的基石。而模拟锁相环也一直占据着统治的地位。随着微电子学领域的快速发展,具有巨大优势的数字化系统开始取代相应的模拟系统。而目前的趋势,正是用数字化方式设计和实现锁相环。锁相环被广泛应用于各类电子产品中,在通信系统、数字电路、硬盘驱动电路及CPU等专用芯片中都是一个必不可少的单元,且直接决定了整个系统的工作稳定性和各项指标的好坏[2]。故而研究锁相环对我国微电子产业的发展同样有着重要的现实意义。 1.2 锁相环的应用 自从锁相环发明之日起,一直到今天,其锁相技术不断地在仪器和电子学、通信中找到了新的应用。而这主要包括硬盘驱动电路、射频、存储器、微处理器和无线收发器。 在许多的应用系统中,系统一般需要不同频率的时钟信号或者要求频率不断变化的时钟信号[3]。锁相环由于使用小数类型的分频器,因此可以达到精准的随意小数的频率范围。锁相环频率合成器他的基本结构如图1-1所示。  图1-1 频率合成器 其中,在信道的选取电路是数字部分,用以改变分频比。这个结构可以实现输出时钟的频率是其输入参考频率的N倍。由于输入参考频率一般来自于稳定的低噪声石英振荡器,故其可以得到相当精确的输出频率。目前,输出频率达到几十GHz的频率合成器都已被报销[4]。 2 锁相环理论 2.1 基本理论 锁相环是一个闭环的相位负反馈控制系统,它能够使得系统输出的信号相位和输入的信号相位对齐。 锁相环系统一般是由压控振荡器、环路滤波器、鉴相器三个部分组成。 锁相环组成的原理框图如图2-1所示。 两信号之间的瞬时相位差为 图2-1 锁相环基本组成   (2-1) (2-1)
式中为参考信号的载波角频率,式 为压控振荡器的自由振荡角频率, 为压控振荡器的自由振荡角频率, 为输出信号以其载波相位 为输出信号以其载波相位 为参考时的瞬时相位,在 VCO 没有收到控制之前他本身是一个固定常数,当受控之后它就是时间上的一个函数[5]。则根据相位和频率他们之间的关系我们可以知道两个信号的瞬时频率差应为 为参考时的瞬时相位,在 VCO 没有收到控制之前他本身是一个固定常数,当受控之后它就是时间上的一个函数[5]。则根据相位和频率他们之间的关系我们可以知道两个信号的瞬时频率差应为  (2-2) (2-2)
PD 是相位比较装置,它把输出信号 与参考信号 与参考信号 的相位进行比较,产生对应于两信号相位差 的相位进行比较,产生对应于两信号相位差 )的误差电压 )的误差电压 。 。 LF 它是一种线性的低通型滤波器,可以用来过滤除掉误差电压  中的高频信号成份,并且它可以调整一些环路的参数,这样就可以保证环路的性能要求,达到提高系统稳定性的作用。 中的高频信号成份,并且它可以调整一些环路的参数,这样就可以保证环路的性能要求,达到提高系统稳定性的作用。 VCO 是被控制电压 所控制的。 所控制的。 使的压控振荡器自身频率向着参考信号的频率接近,使得他们两个的频率越来越小,最后会消除两者频差而锁定。 使的压控振荡器自身频率向着参考信号的频率接近,使得他们两个的频率越来越小,最后会消除两者频差而锁定。 锁相环的整个的工作原理: 1鉴相器将输出信号 和参考信号 和参考信号 的相位之间相比较,然后会生产一个可以反映两个信号的相位差 的相位之间相比较,然后会生产一个可以反映两个信号的相位差 大小误差电压 大小误差电压 。 。 2  经过环路滤波器,滤去高频分量,会得到相应的控制电压 经过环路滤波器,滤去高频分量,会得到相应的控制电压 。 。 3  调整 VCO 频率向参考信号频率靠近,最后两者频率相等而相位同步,以此实现锁定。锁定之后,两信号之间的相位差表现为一个固定的稳态值,即 调整 VCO 频率向参考信号频率靠近,最后两者频率相等而相位同步,以此实现锁定。锁定之后,两信号之间的相位差表现为一个固定的稳态值,即
  (2-3) (2-3)
上式等于零,说明锁相环进入相位锁定的状态。此时,输出和输入信号的频率与相位保持恒定不变的状态, 为恒定值。当上式不等于零时,说明锁相环的相位还没有锁定,输入信号和输出信号的频率不等, 为恒定值。当上式不等于零时,说明锁相环的相位还没有锁定,输入信号和输出信号的频率不等, 随时间变化而变化[6]。 随时间变化而变化[6]。 由此可见,通过锁相环的相位跟踪作用,最终可以实现输出信号与参考信号的同步,两个信号之间不会存在频率差,然后只是存在非常微小的稳态相差。 2.2 基本模块 2.2.1 鉴相器 鉴相器,又可以把它叫做相位比较器。鉴相器它是用做比较两路输入信号的相位差大小 ,完成相位—电压的变换作用。输出的误差电压 ,完成相位—电压的变换作用。输出的误差电压 是相位差 是相位差 的函数,即 的函数,即  (2-4) (2-4) 如图 2-2 所示,当鉴相器处于理想状态,鉴它的鉴相特性会是线性的,即  (2-5) (2-5) 其中 被看做鉴相器增益,它的单位是伏/弧度。 被看做鉴相器增益,它的单位是伏/弧度。  图2-2 理想鉴频器特性 图2-3 正弦鉴相器模型 在很多情况下,这个线性关系不一定能满足。由于鉴相器的种类多种多样,因此拿其鉴相的不同特性 分,有正弦形,锯齿形和三角形等等。当做原理对其进行分析,一般使用的是正弦形[7]。正弦鉴相器的典型设计是可以用低通滤波器和模拟相乘器的串接为模型的,如图2-3所示。 分,有正弦形,锯齿形和三角形等等。当做原理对其进行分析,一般使用的是正弦形[7]。正弦鉴相器的典型设计是可以用低通滤波器和模拟相乘器的串接为模型的,如图2-3所示。 在统一以 为共同参考的情况下,参考信号 为共同参考的情况下,参考信号 与输出信号 与输出信号 可分别写成 可分别写成  (2-6) (2-6)  (2-7) (2-7) 式中 。 。 式中 为其参考信号的载波角频率, 为其参考信号的载波角频率, 为其压控振荡器的自由振荡角频率。 为其压控振荡器的自由振荡角频率。 式中 为参考信号以其载波相位 为参考信号以其载波相位 为其参考时对应的瞬时相位。 为其参考时对应的瞬时相位。 其中 叫做环路的固有频差。鉴相器输出为 叫做环路的固有频差。鉴相器输出为 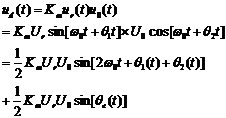 (2-8) (2-8) 式中, 作为相乘器相乘系数; 作为相乘器相乘系数; 是两个相乘的电压信号瞬时的相位误差值。用低通滤波器在滤除 是两个相乘的电压信号瞬时的相位误差值。用低通滤波器在滤除 的成分之后,我们会算出误差电压 的成分之后,我们会算出误差电压  (2-9) (2-9)
可以令它为鉴相器输出电压的振幅。这样我们就可以清楚的知道,鉴相器鉴相特性与数学模型,分别如图2-4与图2-5所示。当 在0周围时,可近似认为: 在0周围时,可近似认为:  (2-10) (2-10)
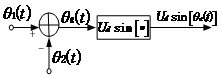
图2-4 正弦鉴相器数学模型 鉴相器有两个主要功能:一是频率牵引,另一是相位锁定。实际应用中,使用的锁相环系统还包括放大器、分频器、混频器等模块。但是,这些附加的模块不会影响锁相环的基本工作原理,可以被忽略[8]。 图2-5 正弦鉴相器的鉴相特性 2.2.2 环路滤波器 环路滤波器的作用是其可以滤除误差电压 中的高频分量,以此来保证环路所要求的性能标准,以便增加系统的稳定性,具有低通特性。更重要的是,在对环路参数调整方面,其起着决定性的作用。环路滤波器是一个线性系统,其数学模型如图 2-6 所示。 中的高频分量,以此来保证环路所要求的性能标准,以便增加系统的稳定性,具有低通特性。更重要的是,在对环路参数调整方面,其起着决定性的作用。环路滤波器是一个线性系统,其数学模型如图 2-6 所示。 常用的环路滤波器有RC积分滤波器、无源比例积分滤波器。 1. RC 积分滤波器。它结构简单,电路构成如图 2-7 所示。 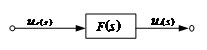 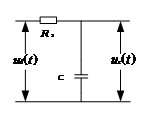 图2-6 环路滤波器数学模型 图2-7 RC积分滤波器 它的传输函数为:  (2-11) (2-11) 其中 。变换为拉普拉斯形式,即用S代替P,则得: 。变换为拉普拉斯形式,即用S代替P,则得:  (2-12) (2-12)
2.无源的比例积分滤波器。它和RC积分型滤波器相比较,另外加了一个电阻R2,它与电容器是串联的,电路的结构如图 2-8 所示[9]。 图2-8 无源比例积分滤波器 它的传输函数为:  (2-13) (2-13) 式中 , , ,变换为拉普拉斯形式,则得 ,变换为拉普拉斯形式,则得  (2-14) (2-14) 2.2.3 压控振荡器 压控振荡器(VCO)在环路中作为被控振荡器,其振荡频率 应随输入控制电压 应随输入控制电压 线性地变化,即 线性地变化,即  (2-15) (2-15)
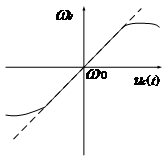
式中 是 VCO 的瞬时角频率; 是 VCO 的瞬时角频率; 为控制灵敏度,或称为增益系数,单位是(rad/s·v)。 为控制灵敏度,或称为增益系数,单位是(rad/s·v)。  与控制电压 与控制电压 之间的关系曲线如图 2-9 所示。 之间的关系曲线如图 2-9 所示。 称为固有振荡频率。它是压控振荡器未加控制电压而仅有偏压时的振荡频率。 称为固有振荡频率。它是压控振荡器未加控制电压而仅有偏压时的振荡频率。 以 以 为中心而变化。图 2-9 中的实线为实际的压控振荡器。 为中心而变化。图 2-9 中的实线为实际的压控振荡器。
压控振荡器控制特性不是所有条件下都可以做到的,仅仅在有限线性的控制范围内 图2-9 压控振荡器控制特性 才会有效[10]。一旦超出了这个控制范围,控制的准确性就会下降,误差就会增大。 在锁相环路中,压控振荡器的输出对鉴相器起作用的并不是瞬时角频率,而是它的瞬时相位  (2-16) (2-16)
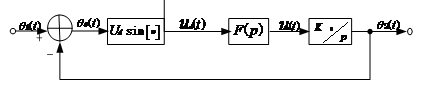
将此式与式(2-7)进行比较可得,以为参考的输出瞬时相位为  (2-17) (2-17) 将其改写成算子形式,即为  (2-18) (2-18) 因此,也叫做它是环路中固有的积分环节。对式(2-18)两边取拉氏变换,即可得出,压控振荡器的传递函数。(图2-10示出了 VCO 的数学模型图)  (2-19) (2-19) 2.3 环路的相位模型及其基本方程 按照环路基本框图和基本部件的时域模型,从而我们就可以知道所有环路的时域模型,如图 2-11 所示。由于环路输入量与输出量都是我们所说的相位,因此我们把环路时域模型叫做为相位模型。 由此图我们可以知道锁相环基本方程可以写成:  (2-20) (2-20)
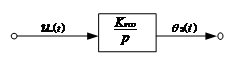
图2-10 VCO的数学模型
图2-11 基本锁相环相位模型 此方程是非线性的微分方程。非线性的特性大部分是由于鉴相器。尽管环路中放大器和压控振荡器同时也可能是存在非线性,但我们电路如果设计的好,均可以把他们视为线性特性。 式2-20中,第一项可以看出瞬时的相位误差值随时间的变化率,也就是瞬时频差;第二项可以看出输入信号值随时间的变化率,也就是固有频差;第三项可以看出 VCO 角频率在控制电压作用下的变化,也就是控制频差。由式 2-20 可得出,系统闭环之后,在任意时刻都有下面的等式关系: 瞬时频差 = 固有频差 - 控制频差[11] 2.4 环路性能 2.4.1 线性化相位模型和传递函数 锁相环路相位模型一般的形式如图 2-11所示,对应动态方程如式(2-20)。由图 2-5 可见,在零点周围的鉴相特性曲线可以使用经过零点直线来代替,这条直线斜率是  (2-21) (2-21)
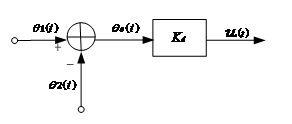
必须要注意的是, 在数值上是和 在数值上是和 相等的,但是单位是不一样的。称 相等的,但是单位是不一样的。称 是鉴相增益,他的单位是 V/rad。线性化的鉴相器数学模型如图 2-12 所示,误差电压为: 是鉴相增益,他的单位是 V/rad。线性化的鉴相器数学模型如图 2-12 所示,误差电压为: 图2-12 线性化鉴相器的数学模型  (2-22) (2-22) 这个公式要成立,必须满足条件是 。 。 用  代替方程中的 代替方程中的 就可以得到线性的动态方程: 就可以得到线性的动态方程:  (2-23) (2-23) 定义环路增益  ,则方程变为: ,则方程变为:  (2-24) (2-24) 式(2-24)指的是环路线性化动态方程的时域表达形式,用它可以推导出方程复频域的方程表达式:  (2-25) (2-25) 式中 、 、 为(2-24)式中 为(2-24)式中 、 、 的拉氏变换, 的拉氏变换, (2-23)式中的 F(p)叫做环路滤波器传输算子,而(2-25)式中的 F (s)叫做环路滤波器传递函数。复频域相位模型则如图 2-13 所示[12]。 图2-13 锁相环路的线性相位模型 由图 2-13 可求得,锁相环路的开环传递函数为:  (2-26) (2-26) 闭环传递函数为:  (2-27) (2-27) 误差传递函数为:  (2-28) (2-28) 现假设,低通滤波器使用 1阶 RC 积分型滤波器,那么锁相环则变为2阶锁相环。RC 积分滤波器如图 2-7 所示,其传递函数为:  (2-29 ) (2-29 ) 其中 是指 -3dB带宽,带入公式(2-27)得: 是指 -3dB带宽,带入公式(2-27)得:  (2-30) (2-30) 如果 , 由式(2-26)知 , 由式(2-26)知  为无穷大,所以 为无穷大,所以 , , 。这个结论预示了锁相环的一个特性:如果输入相位变化非常缓慢,则输出相位会“跟踪”其变化。(最终 。这个结论预示了锁相环的一个特性:如果输入相位变化非常缓慢,则输出相位会“跟踪”其变化。(最终 锁定在 锁定在 上) 上) 2.4.2 锁定状态下锁相环的动态特性 为了便于分析锁相环的动态特性,我们可以把式(2-30)的分母写成控制理论中常用的二阶函数形式,即 。其中 。其中 是“阻尼系数”, 是“阻尼系数”, 是“固有频率”。则公式(2-30)可化简为 是“固有频率”。则公式(2-30)可化简为  (2-31) (2-31) 其中  (2-32) (2-32)  (2-33) (2-33) 由式(2-32)和式(2-33)可以得到  (2-34) (2-34) 而输入输出相位差则为(频率阶跃 对应的拉氏变换等于 对应的拉氏变换等于 ): ):  (2-35) (2-35)
锁相环工作稳定后,其相位差为:  (2-36) (2-36)
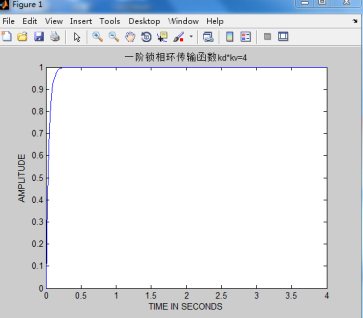
3 锁相环仿真 锁相环在本质上是一个相位负反馈系统。在这个相位负反馈系统中,振荡器输出信号、输入参考信号和反馈信号均是相位信号,而不是电流或电压信号。本章则利用Matlab软件仿真,分析锁相环的锁定性能、稳定性能和调制作用,程序参见附录。 3.1 锁定性能 当输入参考信号的相位发生阶跃变化时,分别分析一阶锁相环与二阶锁相环的锁定性能。 3.1.1 一阶锁相环 对于一阶锁相环,F(s)=1,即没有低通滤波器。相位传输函数和误差传输函数分别为:  (3-1) (3-1)
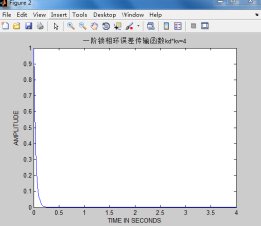
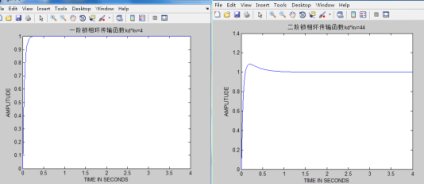
 (3-2) (3-2) 当输入相位发生阶跃变化时,如图3-1所示。  ,建立时间t1=1.58。 ,建立时间t1=1.58。
 ,建立时间t2=0.4。 ,建立时间t2=0.4。
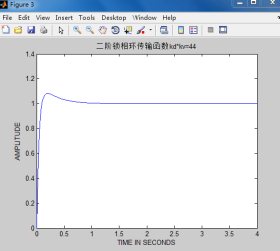
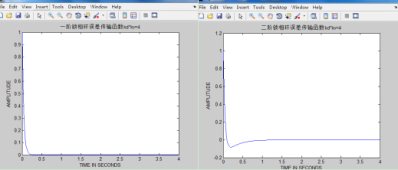
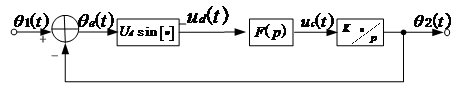
当增益增大时,建立时间较短。 图3-1 一阶锁相环的传输函数的时域响应 当输入相位发生阶跃变化时,如图3-2所示。 ,建立时间t3=1.59。 ,建立时间t4=0.37。 当增益增大时,建立时间较短。 3.1.2 二阶锁相环 对于二阶锁相环,它的环路滤波器是一阶低通滤波器。二阶锁相环路经线性化之后,成为一个二阶线性系统,它具有二阶线性系统的一般性能特点。它的传递函数具有两个极点,一个极点由压控振荡器来提供,另一个极点由低通滤波器来提供[13]。 对于二阶锁相环,当环路滤波器为一阶低通滤波器时,它的相位传输函数和误差传输函数分别为:  (3-3) (3-3) 其中  (3-4) (3-4)  (3-5) (3-5) 图3-2 一阶锁相环误差传输函数的时域响应 由式(3-4)和式(3-5)可以得出  (3-6) (3-6) 当输入相位发生阶跃变化时,如图3-3所示。 ,出现波峰时间t5=0.49,波峰值为1.208,建立时间t6=2.24。 ,出现波峰时间 ,波峰值为1.083,建立时间 ,波峰值为1.083,建立时间 。 。 当输入相位发生阶跃变化时,如图3-4所示。 ,出现波谷时间t9=0.5,波谷值为-0.2,建立时间t10=2.23。 ,出现波谷时间t11=0.2,波谷值为-0.2,建立时间t12=2.07。 当增益增大时,建立时间较短,振荡较小。 3.1.3 一阶锁相环与二阶锁相环的比较 二者的比较如图3-5,3-6所示。 由图3-5、图3-6可知,一阶锁相环稳定下来的时间较短,振荡较小。但是在实际应 用中却很少能够应用的到。因为它没有环路滤波器,故环路高频成分不能被滤除。 3.2 环路性能 在工程中,通常使用的是二阶环路锁相环。在线性跟踪状态下,二阶锁相环可以近似为一个二阶线性系统,其环路动态方程是一个二阶线性微分方程,通过求解此二阶线性微分方程可以得到它的系统性能,也就是其线性化性能[14]。 根据环路的基本框图与基本部件的时域模型,我们可以得到整个环路的时域模型,如图3-7所示。因为环路的输入量和输出量都是相位,所以把环路的时域模型称为相位模型[15]。 图3-3 二阶锁相环传输函数的时域响应 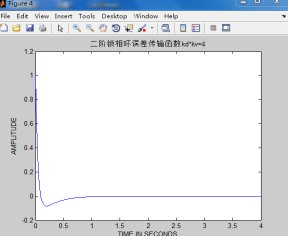 图3-4 二阶锁相环误差传输函数的时域响应 图3-5 锁相环传输函数 图3-6 误差传输函数 图3-7 基本锁相环相位模型 复频域的相位模型则如图 3-8 所示。 图3-8 基本锁相环相位模型 3.2.1 鉴相器的输出 当输入信号的相位发生阶跃变化时,鉴相器的输出响应曲线如图3-9所示,相位误差响应如图3-10所示。 图3-9 鉴相器输出响应 图3-10 相位误差响应 由第二章可知,鉴相器的数学模型是一个增益为 的增益模块 的增益模块 。 。 当输入信号的相位发生阶跃时,即存在相位误差时,从图3-8中可得,随着时间的增大, 先增大后减小最后趋于0,也就是说,此时锁相环处于锁定状态。其中,达到峰值的时间为0.1,趋于稳定的时间为1.91。 先增大后减小最后趋于0,也就是说,此时锁相环处于锁定状态。其中,达到峰值的时间为0.1,趋于稳定的时间为1.91。 图3-10为相位误差响应,变化与一致,为鉴相器的输入。由公式 可知,当出现相位差时,引起变化[16]。 可知,当出现相位差时,引起变化[16]。 3.2.2 低通滤波器的输出 低通滤波器的输出如图3-11所示。 由图3-11可得,低通滤波器的输出增加,即为压控振荡器的输入。幅值随着时间先增大后减小,并趋于稳定。稳定时间为1.89。
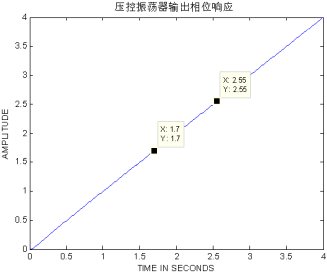
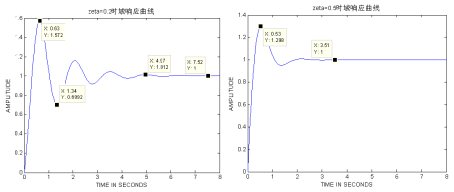
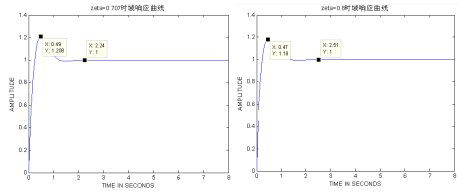
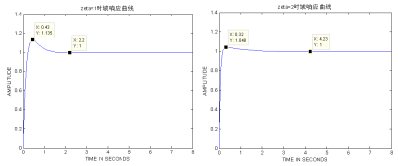
图3-11 低通滤波器输出 3.2.3 压控振荡器的输出 压控振荡器的输出如图3-12所示。 图3-12 压控振荡器输出响应 从图3-12中可以看出,当输入信号发生阶跃变化时,环路滤波器的输出逐渐升高,从而导致压控振荡器的频率发生变化,以此来减少环路滤波器的相位误差。压控振荡器起的是积分器的作用,且斜率为1。 综上所述,锁相环的响应过程可以这样描述:输入信号的相位领先于输出信号,两者的相位差将开始随着时间增加,导致鉴相器产生一个随时间增加而增加的输出信号 。该信号经过低通滤波器滤波,经一定时间的延迟,产生控制信号 。该信号经过低通滤波器滤波,经一定时间的延迟,产生控制信号 ,它也随时间增加。因此,压控振荡器的频率也将增加,这会减小输出信号与输入信号的相位差。经过一定的时间,振荡器的振荡频率将调节到与输入信号的频率相等。 ,它也随时间增加。因此,压控振荡器的频率也将增加,这会减小输出信号与输入信号的相位差。经过一定的时间,振荡器的振荡频率将调节到与输入信号的频率相等。 3.3 稳定性能 在实际工作之时,锁相环路不可避免的会受到各种因素的干扰,使环路呈现不稳定的状况,脱离原来的平衡[17]。下面,我们将研究阻尼系数对于环路稳定性能的影响。其中,固有振荡频率 将保持恒定不变。不同阻尼系数的响应曲线如图3-13、3-14、3-15所示。 将保持恒定不变。不同阻尼系数的响应曲线如图3-13、3-14、3-15所示。 通过响应曲线的比较,我们可得到一些稳定时间与波峰值,如表3-1所示。 从表3-1中可以得到, 当 时,响应的曲线表现出剧烈的减幅振荡,且稳定下来的时间也会较长。 时,响应的曲线表现出剧烈的减幅振荡,且稳定下来的时间也会较长。 当 时,振荡变小,稳定的时间也变小。 时,振荡变小,稳定的时间也变小。 图3-13  和 和 的时域响应曲线 的时域响应曲线 当 时,振荡变小,但是稳定的时间变长,环路的响应速度降低。 时,振荡变小,但是稳定的时间变长,环路的响应速度降低。 综上所述,是锁相环的常取值。 图3-14  和 和 的时域响应曲线 的时域响应曲线 图3-15  和 和 的时域响应曲线 的时域响应曲线 3.4 调制作用 使载波频率按照调制信号改变的调制方式被称为调频。经过调频的波被称为调频波。已调波频率变化的大小由调制信号的大小所决定,变化的周期由调制信号的频率所决定。已调波的振幅保持不变。调频波用英文字母FM表示。 表3-1 对稳定性能的影响 调频波(调频信号)的特点是:其频率随调制信号振幅的变化而变化,然而它的幅度却始终保持不变。当调制信号的幅度为零时,调频波的频率称为中心频率 。当用完整的调制信号(即调制信号的幅度作正负变化)对高频载波信号进行调频时,调频波的频率就围绕着而随调制电压线性地变化。当调制信号向正方向增大时,调频波的频率就高于中心频率;反之,当调制信号向负方向变化时,调频波的频率就低于中心频率。 。当用完整的调制信号(即调制信号的幅度作正负变化)对高频载波信号进行调频时,调频波的频率就围绕着而随调制电压线性地变化。当调制信号向正方向增大时,调频波的频率就高于中心频率;反之,当调制信号向负方向变化时,调频波的频率就低于中心频率。 调频波的特点是频率随调制信号幅度的变化而变化。压控振荡器的振荡频率则取决于输入电压的幅度。当载波信号的频率与锁相环的固有振荡频率 相等时,压控振荡器输出信号的频率将保持 相等时,压控振荡器输出信号的频率将保持 不变。若压控振荡器的输入信号除了有锁相环低通滤波器输出的信号 不变。若压控振荡器的输入信号除了有锁相环低通滤波器输出的信号 以外,还有调制信号 以外,还有调制信号 ,则压控振荡器输出信号的频率就是以 ,则压控振荡器输出信号的频率就是以 为中心,并随着调制信号幅度的变化而变化的调频波信号。由此可得,调频电路可利用锁相环来组成。根据锁相环的工作原理与调频波的特点可得,解调电路组成框图如图3-16所示。 为中心,并随着调制信号幅度的变化而变化的调频波信号。由此可得,调频电路可利用锁相环来组成。根据锁相环的工作原理与调频波的特点可得,解调电路组成框图如图3-16所示。 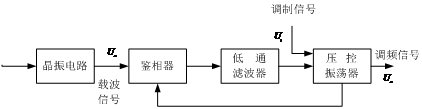
图3-16 锁相环组成的调频电路 其中,我们选取载波信号的频率 的余弦函数,得到的仿真波形如图3-17示。 的余弦函数,得到的仿真波形如图3-17示。 其中,我们设置载波频率 为200。 为200。 因为调频信号的频率会随着调制信号振幅的变化而发生变化,故当调制信号的幅度为零时,调频波的频率称为中心频率 。 。 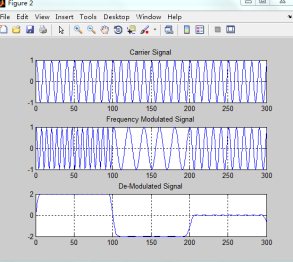
图3-17 锁相环的调制作用 当调制信号振幅为0时,压控振荡器频率(中心频率)与载波频率相等。图中的右边信号,即: 。 。 当调制信号振幅为2时,左边信号的频率大于中心频率。 当调制信号振幅为-2时,中间信号的频率小于中心频率。 下面我们也可用公式验证: 左边信号: , , , , 。 。 中间信号: , , , , 。 。 4 结论 目前,锁相环技术在通信中早已趋于成熟。随着科技的不断进步与发展,目前的锁相环都是基于半导体工艺的集成电路。对于未来而言,用锁相环的集成化设计减小相应噪声、提高锁相环的频率预测精度、硬件系统的运算速率以及降低干扰也是其研究的一个重要方向。 本设计在阅读一些文献和对锁相环有一定程度了解的基础之上,运用了Matlab进行仿真。主要完成了以下工作: 其一,在掌握了锁相环的基本原理并对文献研究的基础上,对锁相环的工作原理进行了深入的分析,深入了解锁相环技术的数学分析方法,应用此方法得到锁相环技术的数学模型,用这些理论进行指导实际中的设计工作。 其二,在对基本原理和电路结构确定的基础之上,将锁相环的整体电路进行层次化分解。即鉴相器、低通滤波器、压控振荡器,并对各个模块的工作原理和性能进行了比 较详细的分析。 其三,用Matlab软件对设计的锁相环电路进行了模拟仿真,分析了锁相环的锁定性能、环路性能、稳定性能及其调制作用。 本设计仍然存在的问题,需进行后续的完善:在运用Matlab设计锁相环时,并没有引入噪声对锁相环的影响以及相应的分析;未对锁相环的各项参数进行深入的讨论;设计仅限于在对锁相环理论的研究与分析基础之上,并没有针对其实际中的应用进行过多深入的研究了解。 参考文献 - 耿晓勇. 无晶振快速锁定锁相环设计[D]. 兰州:兰州大学, 2013:14-16.
- 谭茗, 唐立军, 黄水龙等. 基于40 nm CMOS工艺可快速锁定的宽带锁相环电路设计[J]. 微电子学与计算机, 2014:156-159.
- 方盛, 秦希, 蒋俊等. 一种快速捕获、带宽可调的锁相环电路[J]. 固体电子学研究与进展, 2009:33-40.
- 郝绍杰. 基于集成频率合成器的锁相环设计[J]. 国外电子测量技术, 2008:55-57.
- 赵新强. 高速低功耗CMOS电荷泵锁相环的技术研究[D]. 北京:电子科技大学, 2014:13-22.
- 吕捷. S波段低杂散高速跳频频综的设计[D]. 北京:电子科技大学, 2011:6-12.
- 莫小灵. 基于无线电通信系统的锁相环应用分析[J]. 思茅师范高等专科学校学报, 2013:1-4.
- 王磊. 线性调频在未来民航空-空通信网络中的应用研究[D]. 北京:北京交通大学, 2012:76-110.
- 贾薇. 一种快速锁定锁相环的设计与分析[D]. 辽宁:辽宁大学, 2013:45-47.
- 周群. 基于FPGA技术的相位频率跟踪方法的研究[D]. 北京:北京化工大学, 2013:6-22.
- 周海牛. 异频鉴相技术的的研究与实现[D]. 陕西:西安电子科技大学, 2010:19-34.
- 王昊. 基于锁相环的8GHz跳频源设计[D]. 吉林:长春理工大学, 2011:67-78.
- ZHANG Yan-yan. The temperature control system based onPID algorithm and 89C52 single chip microcomputer[J]. The Modern Electronic Technology. On SCM, 2014, 20(20):404-435.
- LI Jun-ting, SHI Wen-lan, GAO Nan. Parameter selfsetting fuzzy PID in the application of temperature control[J]. Radio Project. Commun, 2013:47-50.
- Marc D. Ulrich,Peter A.Bames, Comparison of solid-state thennionic refrigerayion withthermoelectric refrigeration[J]. Opt. Commun, 2010:13-15.
- 罗升龙. 高性能锁相环IP设计[D]. 北京:中国科学院微电子中心, 2014:23-27.
- 李顺. 无线电测向通信系统在空降兵集结中的应用[D]. 黑龙江:哈尔滨理工大学, 2012:41-56.
Design of Phase Locked Loop Circuit Based on MATLAB Li Xiangnong (College of the Physics and Electronic Information, Dezhou University, Dezhou Shandong, 253023) Abstract The design on the basis of research on the large amount of data, the first lock on the basic principle of the system is analyzed, with traditional analog PLL structure is based on the mathematical model of PLL, a detailed description of the phase-locked loop overall description and a phase detector, a loop filter, a voltage controlled oscillator circuit and other modules. And as a starting point, the lock performance and stability and other properties of the phase locked loop is analyzed. In the analysis and design at the same time, the use of matlab software phase locked loop circuit simulation. Firstly, the first-order and second-order phase-locked loop PLL lock performance, and compared. Secondly, the influence of damping on the stability of the loop. Finally, the modulation of the PLL. From PLL simulation results, theoretical results and experimental results are in agreement, reached a phase locked loop circuit design requirements. Keywords Phase-locked loop; Phase detector; MATLAB 致谢 首先我衷心感谢我的论文指导老师张晨。张老师在我做毕业论文的每个阶段,从选题到查阅资料,开题报告提交,中期论文初稿的修改,后期论文格式调整等各个环节中都给予我了悉心的指导。这几个月以来,张老师不仅在学业上给我以精心指导,同时还在思想给我以无微不至的关怀,在此,谨向张老师表示崇高的敬意和衷心的感谢! 同时,感谢我的舍友侯永山,刘昌江等同学的热情帮助。感谢他们为我提出的有意的建议和意见,有了他们的支持、鼓励和帮助,使我的毕业论文进行的更加顺利。 然后还要感谢大学四年来所有的老师,为我们打下专业知识的基础;同时还要感谢所有的同学们,正是因为有了你们的支持和鼓励。此次毕业设计才会顺利完成。 最后,感谢我的母校-德州学院四年来对我的大力栽培。我还要感谢培养我长大的父母,谢谢您们!
附录 1.锁定性能 - close all
- kv = 2;
- kd = 2;
- dt = 0.01
- t = 0:dt:4
- u = ones(1,length(t))
- g11 = [tf([2*pi*kv*kd],[1 2*pi*kv*kd])] %its the transfer function given in the handout
- [y11 t] = lsim(g11,u,t)
- figure
- plot(t,y11)
- xlabel('TIME IN SECONDS')
- ylabel('AMPLITUDE')
- title('一阶锁相环传输函数kd*kv=4')
- %***************************************************************
- g12 = [tf([1 0],[1 2*pi*kv*kd])] %error transmittance given in the handout
- [y12 t] = lsim(g12,u,t)
- figure
- plot(t,y12)
- xlabel('TIME IN SECONDS')
- ylabel('AMPLITUDE')
- title('一阶锁相环误差传输函数kd*kv=4')
- %****************************************************************
- a = 3.15
- zeta = sqrt((pi*kv*kd)/(2*a))
- omegan = sqrt(2*pi*kv*kd*a)
- g21 = [tf([2*zeta*omegan omegan^2],[1 2*zeta*omegan omegan^2])]
- [y21 t] = lsim(g21,u,t)
- figure
- plot(t,y21)
- xlabel('TIME IN SECONDS')
- ylabel('AMPLITUDE')
- title('二阶锁相环传输函数kd*kv=44')
- %****************************************************************
- g22 = [tf([1 0 0],[1 2*zeta*omegan omegan^2])]
- [y22 t] = lsim(g22,u,t)
- figure
- plot(t,y22)
- xlabel('TIME IN SECONDS')
- ylabel('AMPLITUDE')
- title('二阶锁相环误差传输函数kd*kv=4')
- %****************************************************************
2.调制信号- kv = 1;
- kd = 1;
- dt = .01;
- t = 0 : dt : 2;
- step = ones(1,length(t));
- a = 3.15;
- zeta = sqrt((pi*kv*kd)/(2*a));
- wn = sqrt(2*pi*kv*kd*a); % Signal generation
- t0 = .15; % signal duration
- ts = 0.0005; % sampling interval
- fc = 200; % carrier frequency
- kf = 50; % modulation index
- fs = 1/ts; % sampling frequency
- t = [0:ts:t0]; % time vector
- df = 0.25; % required frequency resolution
- c = cos(2*pi*fc*t); % carrier signal
- m = [2*ones(1,t0/(3*ts)),-2*ones(1,t0/(3*ts)),zeros(1,t0/(3*ts)+1)];
- % Frequency modulation
- int_m(1) = 0;
- for (i = 1 : length(t)-1) % integral of m
- int_m(i+1) = int_m(i) + m(i)*ts;
- end
- u = cos(2*pi*fc*t + 2*pi*kf*int_m); % modulated signal
- figure
- subplot (3,1,1)
- plot (m(1:300))
- TITLE ('Modulating Signal')
- grid on;
- subplot (3,1,2)
- plot (c(1:300))
- TITLE ('Carrier Signal')
- grid on;
- subplot (3,1,3)
- plot (u(1:300))
- TITLE ('Frequency Modulated Signal')
- grid on; % Frequency demodulation
- t = [0:ts:ts*(length(u)-1)]; % finding phase of modulated signal
- x = hilbert(u);
- z = x.*exp(-j*2*pi*250*t);
- phi = angle(z);
- phi = unwrap(phi); % restoring original phase
- dem = (1/(2*pi*kf))*(diff(phi)/ts); % demodulated signal
-
- figure
- subplot (3,1,1)
- plot (c(1:300))
- TITLE ('Carrier Signal')
- grid on;
- subplot (3,1,2)
- plot (u(1:300))
- TITLE ('Frequency Modulated Signal')
- grid on;
- subplot (3,1,3)
- dem = smooth(dem,7) + 1;
- plot (dem(1:300))
- axis ([0 300 -2 2]);
- TITLE ('De-Modulated Signal')
- grid on;
- end

完整论文下载(word格式 可编辑):
http://www.51hei.com/bbs/dpj-86756-1.html
| 














 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

