|
步进电机控制实验
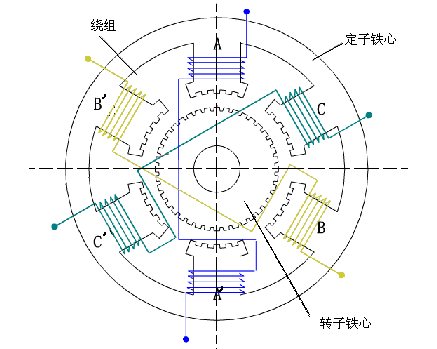
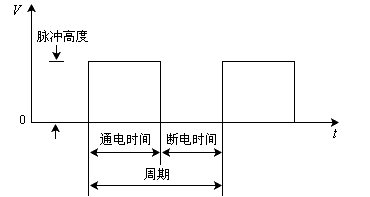
1. 实验目的(1)学习及掌握三相六拍步进电机工作原理。 (2)学习及掌握单片机与步进电机接口电路连接及控制方法。 (3)学习及掌握步进电机控制程序的设计方法。 2. 实验设备(1)ZY15MCU12BC2单片机实验开发装置一台。 (2)PC 系列微机及相关软件。 3. 实验内容及要求(1)同实验一。 (2)同实验一。 (3)步进电机工作原理。 步进电机是现代数字控制技术中最早出现的执行部件,其特点是可以将数字脉冲信号直接转换为一定数值的机械角位移,并且能够自动产生定位转矩使转轴锁定。步进电机本质上是一个数字/角度转换器。图4-23所示为三相电机结构示意图。 图4-23 三相步进电机结构示意图 由图4.22可知步进电机的定子铁心上有6个等分磁极:A、Aˊ,B、Bˊ,C、Cˊ,相邻两个磁极间夹角为 ,各相夹角为 ,各相夹角为 ,相对的两个磁极组成一组A-Aˊ,B-Bˊ,C-Cˊ。定子每个磁极上均匀分布了5个矩形小齿,电机转子圆周上也均匀的分布着40个小齿,相邻齿夹角为 ,相对的两个磁极组成一组A-Aˊ,B-Bˊ,C-Cˊ。定子每个磁极上均匀分布了5个矩形小齿,电机转子圆周上也均匀的分布着40个小齿,相邻齿夹角为 。利用电磁学的性质可知,在某相绕组通电时,相应的定子磁极将产生磁场,与转子形成磁路;如此时定子的小齿与转子的小齿没有对齐,则在磁场作用下,转子就转动一定角度,达到齿的对齐。 。利用电磁学的性质可知,在某相绕组通电时,相应的定子磁极将产生磁场,与转子形成磁路;如此时定子的小齿与转子的小齿没有对齐,则在磁场作用下,转子就转动一定角度,达到齿的对齐。 在图4.22三相单三拍控制方式下,当电机A相绕组通电,B、C相不通电时,在磁场的作用下,转子齿和A相定子小齿对齐。设此状态为初始状态,并且令与A相磁极中心线对齐的转子齿为0号齿。由于B相磁极与A相磁极相差,可知 = =  ,不为整数,即此时转子齿与B相定子小齿不对齐,只是转子的13号齿靠近B相磁极中心线,且相差 ,不为整数,即此时转子齿与B相定子小齿不对齐,只是转子的13号齿靠近B相磁极中心线,且相差  个齿,即相差 个齿,即相差 。如果此时突然变为B相通电,而A、C相都不通电,那么,13号齿就会在磁场的作用下转到与B相磁极中心线对齐的位置,于是转子就转动了个齿,即转动这个转动角度称为步距角 。如果此时突然变为B相通电,而A、C相都不通电,那么,13号齿就会在磁场的作用下转到与B相磁极中心线对齐的位置,于是转子就转动了个齿,即转动这个转动角度称为步距角 ,这就是常说的步进电机“走了一步”。这样,按照A→B→C→A顺序通电1次,可以使转子转动。 ,这就是常说的步进电机“走了一步”。这样,按照A→B→C→A顺序通电1次,可以使转子转动。 由此得到步进电机的步距角计算公式如下: 式中: 为转子齿数; 为转子齿数; 为运行拍数;其中 为运行拍数;其中 为控制绕组相数, 为控制绕组相数, 为状态系数,单三拍或双三拍时 为状态系数,单三拍或双三拍时 ,单六拍或双六拍时 ,单六拍或双六拍时 。 。 同理,若按照A→C→B→A的顺序依次通电,步进电机则按相反方向转动。 (4)步进电机控制原理。 由前述可知,步进电机就是靠控制定子绕组轮流通电而转动的,驱动绕组的电压为直流12V,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按照方向控制信号所指示的方向转动一个固定的角度(步距角),即步进电机“走”了1步。所以,由初始位置,只要知道步距角和走过的步数,便能得到电机最终的位置。因此,可以通过控制步进驱动器输入脉冲数来控制步进电机角位移量,从而达到准确定位的目的;同时还可以通过控制步进驱动器输入脉冲频率来控制电机的速度和加速度,从而达到调速的目的。 综上所述步进电机各相绕组通电脉冲的频率和各相绕组通电顺序是控制步进电机转速和转动方向的关键技术。 步进电机要“步进”,就得产生如图4.23所示的脉冲信号。图4-24的脉冲序列是用周期、脉冲高度和通断时间来描述的。在数字电路中,脉冲高度由元件电平决定,如TTL电平为0V~5V,COMS电平为0V~10V。步进电机每一步的响应,都需要一定的时间,即一个高脉冲要保留一定的时间,以便电机完全达到一定的位置。步进电机转动角度大小与施加在绕组上的脉冲成正比。通断的时间可以利用延时在软件中实现,脉冲序列频率决定了步进电机的实际工作速率(转速)。可通过不同长度的延时来得到不同频率的步进电机输入脉冲,从而改变步进电机的转速。 图4-24 脉冲序列信号示意图 步进电机转动方向与输入脉冲的顺序有关,电机的转速既取决于控制绕组的通电频率,又取决于绕组的通电方式,表4-4给出三相步进电机的转动方向与各相绕组通电顺序和通电方式的对应关系。其他四相、五相、六相步进电机可以相似而得。 表4-4 三相步进电机转动对应关系表 | | | | A→B→C→A AB→BC→CA→AB A→AB→B→BC→C→CA→A A→C→B→A AB→CA→BC→AB A→CA→C→BC→B→AB→A | |
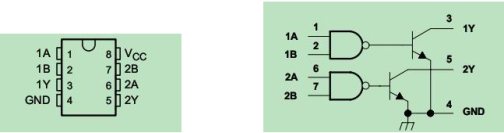
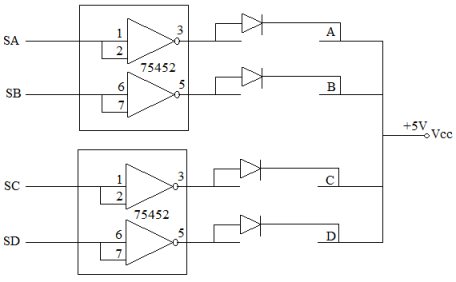
(5)单片机控制步进电机方法及接口电路。 步进电机各相绕组通电脉冲的频率和各相绕组通电顺序是控制步进电机转速和转动方向的关键技术。由单片机I/O引脚输出脉冲信号,信号周期可采用软件延时或定时器定时实现,各相绕组通电顺序(方向控制信号)通过程序控制字控制对应的I/O引脚输出实现。 由于单片机的输出电压非常微弱(0V~5V),不能直接驱动步进电机,从单片机输出的电压信号必须经过放大电路放大后才可以驱动步进电机。ZY15MCU12BC2实验平台步进电机驱动器由2片驱动芯片75452实现,75452是双外围器件驱动芯片,其引脚和内部逻辑图如图4-25(a)、(b)所示。 75452内部由两个与非门及三极管放大电路构成,图(a)中1A、1B和2A、2B分别是内部两个与非门的输入引脚,接收外部数字脉冲信号,输入信号经内部三极管放大后通过引脚1Y、2Y输出。 (a) 75452 引脚图 (b) 75452 内部逻辑图 图4-25 75452 引脚及逻辑图 ZY15MCU12BC2实验平台步进电机驱动器为四相四拍驱动,四相步进电机驱动器接口电路如图 4-26所示。 图4-26 实验平台四相步进电机驱动器接口电路图 图中SA、SB、SC、SD分别是2片75452的输入信号,单片机P1.0 ~ P1.3接SA~SD,由P1口按四相四拍顺序输出控制码驱动步进电机运转,步进电机的步距角 ,即电动机转动1周为100步。 ,即电动机转动1周为100步。 驱动电路由脉冲信号来控制,电机转动方向与线圈通电顺序有关。根据四相四拍控制方法,步进电机正转和反转时SA、SB、SC、SD通电顺序如下: 步进电机正转:  步进电机反转:  各线圈通电顺序与P1.0 ~ P1.3脉冲分配方式产生的励磁逻辑如表4-5所示: 表4-5 四相单四拍步进电机转动励磁逻辑表 | | | | | | 0 0 0 1 0 0 1 0 0 1 0 0 1 0 0 0 | | | | | 0 0 0 1 1 0 0 0 0 1 0 0 0 0 1 0 | | | |
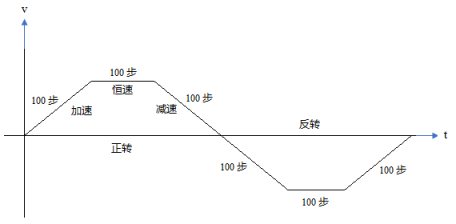
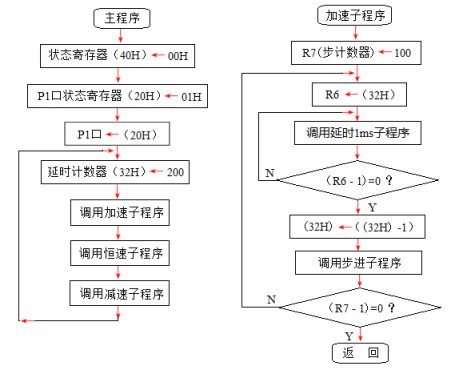
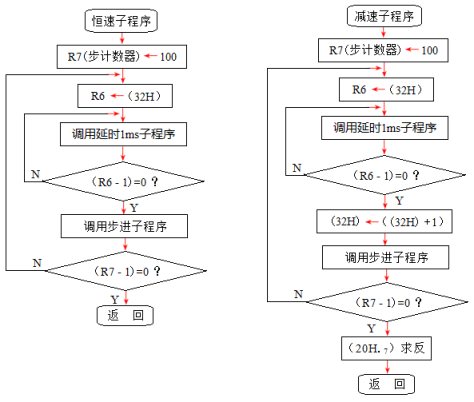
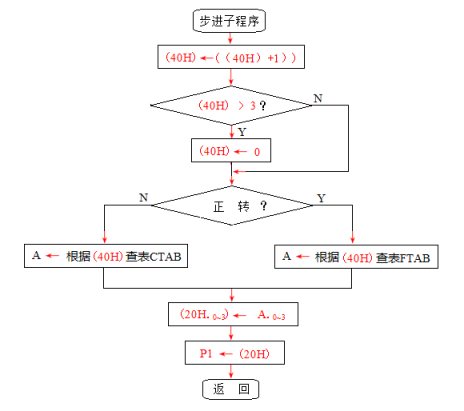
(6)实验接口电路连接。 单片机P1.0 ~ P1.3接SA、SB、SC、SD和指示灯L0、L1、L2、L3端,当P1.i(i = 0 ~ 3)为“1”时对应线圈通电,此时指示灯应熄灭。(注意:不做此实验时,步进电机应关闭,使用步进电机手动开关实现。) 编写并调试步进电机正向驱动子程序、反向驱动子程序和主程序,使步进电机按图 4-27所示循环工作。 图4-27 步进电机转速变化图 (7)实验程序包括主程序、加速子程序、恒速子程序、减速子程序和步进子程序,程序流程图如图4-28所示。 其中40H单元存放步进电机状态值,0~3分别对应驱动器SA、SB、SC、SD端口。 20H单元存放P1状态值,P1.0~P1.3为步进电机通电控制字,P1.7接指示灯L7端,指示电机正转、反转:L7灯亮,电机反转;L7灯灭,电机正转。 步进电机正转状态表:FTAB: 01H、02H、04H、08H; 步进电机反转状态表:CTAB: 01H、08H、04H、02H。 图4-28 步进电机主程序、子程序流程图 (8)实验程序(略)。ZY12232.ASM。 (9)在μVision3开发平台上输入程序,编译、连接程序。 (10)调试、运行程序。 ⒈ 实验电路连接见“图4-8步进电机实验电路图”。 ⒉ 将01H、02H、04H、08H、01H、02H、04H、08H ……写入P1口,观察步进电机转动是否正常,指示灯L3 ~ L0的状态与写入P1口的值有何关系。 ⒊ 设置初值:P1口←01H,(20H)←01H,(40H)←0,观察步进电机是否为正转现象;P1口←81H,(20H)←81H,(40H)←0,观察步进电机是否为反转现象。 ⒋ 修改(32H)单元初值,测试步进电机能够达到的最大转速。 (11)实验结束,拆除接线,将一切整理复原。 4. 实验预习要求(1)认真阅读、理解实验指导书并领会本次实验目的要求与实验内容。 (2)仔细阅读步进电机工作原理、单片机控制方法、实验平台接口电路等内容。 (3)仔细阅读步进电机实验程序。 5. 实验报告要求(1)按实验顺序,记录并分析实验数据。 (2)实验程序框图,实验程序清单。 (3)写出实验结果、实验体会及对实验的改进意见。
word格式的选题资料下载地址:
http://www.51hei.com/bbs/dpj-93744-1.html
|