|
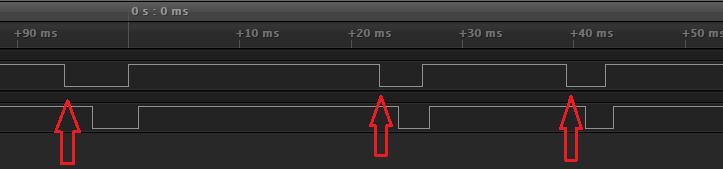
它主要是通过判断A和B相在转动时的相位差 其实就是A和B哪个先C(公共端)短路,顺时针是B先短路,然后是A短路,再到A和B同时短路,.... 数据手册看一下就知道了 论坛有代码,可以是检测哪个先出现低电平来判断,或者是读取两个端口,得到一组数据 我是轮流读取两个端口数据来检测的 |
| 论坛里很多驱动代码,都写的很多不错, |
|
sbit FSA = P3^7; //右旋 sbit FSB = P3^5; //左旋 uint8_t fsss=0;//按钮状态 //检测 void EC11(void) { if(FSA==1 && FSB==1) {//没有旋转 fsss=0; return; } else if(FSA==0 && FSB==1 && fsss==0) { fsss='R'; //可能是右旋 } else if(FSA==1 && FSB==0 && fsss==0) { fsss='L'; //可能是左旋 } else if(FSA==0 && FSB==0 && fsss!=0xFF) { if(fsss=='L') { //处理左旋 fsss = 0xFF; } else if(fsss=='R') { //处理右旋 fsss = 0xFF; } } } |
51hei截图20210905203923.jpg (60.31 KB, 下载次数: 69)

 收藏
收藏 顶
顶 踩
踩