|
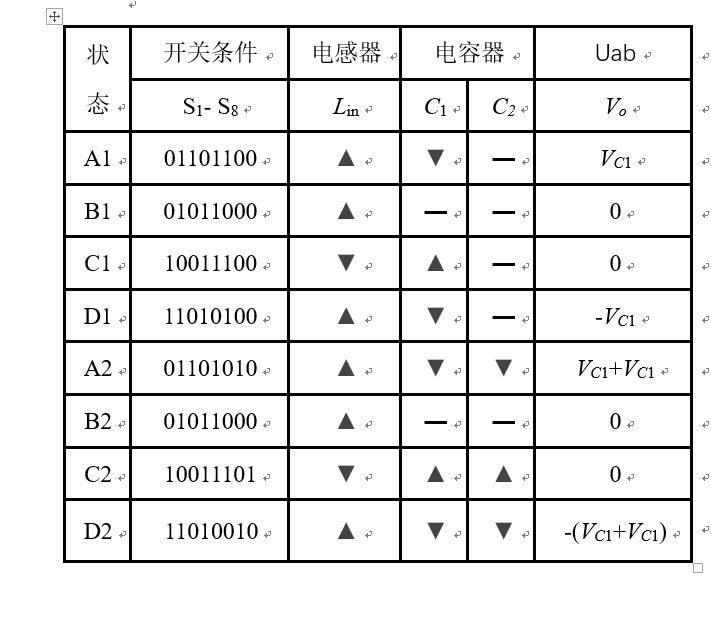
以下是使用STM32单片机(例如STM32F4系列)编写的单相五电平逆变电路控制信号的示例代码: #include "stm32f4xx.h" // 定义PWM的周期和占空比 #define PWM_PERIOD 1000 // PWM周期为1000个计数器周期 #define PWM_DUTY_CYCLE 500 // PWM占空比为50% // 定义恒定参考值 #define Vdc1_ref 2000 // Vdc1-ref恒定参考值 #define Vdc2_ref 1000 // Vdc2-ref恒定参考值 // 定义载波信号幅值 #define Vtri1_p 100 // Vtri1,p的幅值,两倍于Vtri2,p #define Vtri2_p 50 // Vtri2,p的幅值 // 定义输出电压大小 #define VC1 1000 // VC1输出电压大小 #define VC2 500 // VC2输出电压大小 // 初始化PWM void PWM_Init(void) { // 启用GPIOB时钟 RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE); // 启用TIM4时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); // 配置GPIOB引脚为PWM模式 GPIO_InitTypeDef GPIO_InitStruct; GPIO_InitStruct.GPIO_Pin = GPIO_Pin_8; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF; GPIO_InitStruct.GPIO_Speed = GPIO_Speed_100MHz; GPIO_InitStruct.GPIO_OType = GPIO_OType_PP; GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL; GPIO_Init(GPIOB, &GPIO_InitStruct); // 配置GPIOB引脚复用功能 GPIO_PinAFConfig(GPIOB, GPIO_PinSource8, GPIO_AF_TIM4); // 配置TIM4 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct; TIM_TimeBaseInitStruct.TIM_Prescaler = 0; TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInitStruct.TIM_Period = PWM_PERIOD - 1; TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1; TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0; TIM_TimeBaseInit(TIM4, &TIM_TimeBaseInitStruct); // 配置TIM4通道1为PWM输出 TIM_OCInitTypeDef TIM_OCInitStruct; TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1; TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStruct.TIM_Pulse = PWM_DUTY_CYCLE - 1; TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High; TIM_OC1Init(TIM4, &TIM_OCInitStruct); TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable); // 启动TIM4 TIM_Cmd(TIM4, ENABLE); } // 主函数 int main(void) { // 初始化PWM PWM_Init(); while (1) { // 根据调制波Vref,p进行比较生成PWM调制信号 // 当调制波小于恒定参考值Vdc2-ref时 if (Vref < Vdc2_ref) { // 根据载波Vtri2,p和调制波Vref,p生成PWM调制信号 if (Vtri2 < Vref) // 生成PWM调制信号A1 TIM_SetCompare1(TIM4, PWM_DUTY_CYCLE); else if (Vtri2 >= Vref && Vtri2 < Vdc2_ref) // 生成PWM调制信号B1 TIM_SetCompare1(TIM4, 0); else if (Vtri2 >= Vdc2_ref && Vtri2 < (Vdc2_ref + Vref)) // 生成PWM调制信号C1 TIM_SetCompare1(TIM4, -PWM_DUTY_CYCLE); else // 生成PWM调制信号D1 TIM_SetCompare1(TIM4, 0); } // 当调制波大于恒定参考值Vdc2-ref时 else { // 根据载波Vtri1,p和调制波Vref,p生成PWM调制信号 if (Vtri1 < Vref) // 生成PWM调制信号A2 TIM_SetCompare1(TIM4, PWM_DUTY_CYCLE); else if (Vtri1 >= Vref && Vtri1 < (Vdc1_ref + Vref)) // 生成PWM调制信号B2 TIM_SetCompare1(TIM4, 0); else if (Vtri1 >= (Vdc1_ref + Vref) && Vtri1 < (2 * Vdc2_ref)) // 生成PWM调制信号C2 TIM_SetCompare1(TIM4, -PWM_DUTY_CYCLE); else // 生成PWM调制信号D2 TIM_SetCompare1(TIM4, 0); } } } 请注意,上述代码仅为示例,具体的实现可能因您的硬件配置和需求而有所不同。您需要根据实际情况定义并计算各个变量的值,并根据需要更新PWM的周期和占空比。同时,您还需要根据实际的硬件连接情况进行相应的引脚配置和初始化设置。 |
|
这是正弦波交流逆变的PWM驱动图形。介绍一个简单的方式: 1、先用其它软件,如EXCEL,将正弦与三角调制信号的交点计算出来。形成你在下图中的方波。 2、将1/4个周期中(90度),每个方波的占空比例计算出来,做成一个表格(或数组)。 3、驱动电机采用的PWM参数,从2、表格中读取。 这种应用,要注意相位:0-90度顺取表格参数;90-180,逆取;180-360,驱动电压反相。 当然表格也可以从0度做到180度。这样顺序取数就可以了。 |
 收藏
收藏 顶
顶 踩
踩

