基于Somchine平台的PTO伺服运动控制
M218 PLC本体自带2轴100khz脉冲输出,可作为一般的定位控制和速度控制。下面以此为例简析相关指令应用:
每个PTO在使用前必须定义相关参数,并启用 PTO功能: 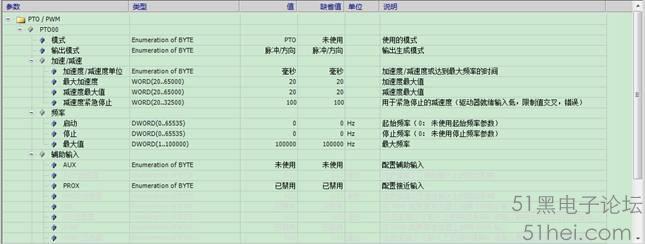
每个PTO使用必须应用映射功能块
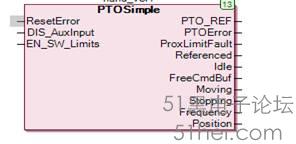 以启用某个PTO功能,以便在相关命令中让某个点发出脉冲。 以启用某个PTO功能,以便在相关命令中让某个点发出脉冲。
在其中使用脉冲功能中的常用相关功能块是:
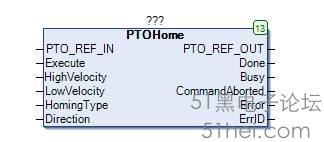 寻原点。 寻原点。
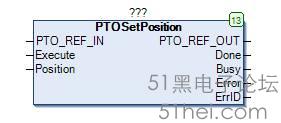 设定当前位置。(一般在自定义原点的时候使用,给position一个0的值) 设定当前位置。(一般在自定义原点的时候使用,给position一个0的值)
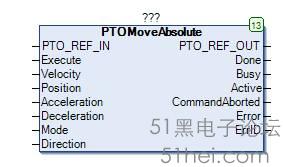 走绝对位移。(相对于原点走距离) 走绝对位移。(相对于原点走距离)
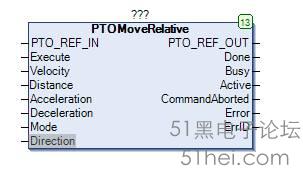 走相对位移。(相对于当前位置走距离) 走相对位移。(相对于当前位置走距离)
 走速度模式(以一定的速度移动) 走速度模式(以一定的速度移动)
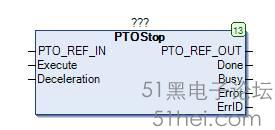 轴停止(停止当前一切运动) 轴停止(停止当前一切运动)
对于其 该引脚的输入,就是 该引脚的输入,就是 在该功能块中的映射输出: 在该功能块中的映射输出:
也可以直接连接ptosimple功能块的ref输出(在cfc中)。
相关输入引脚说明:(输出就按相关英文意思理解)
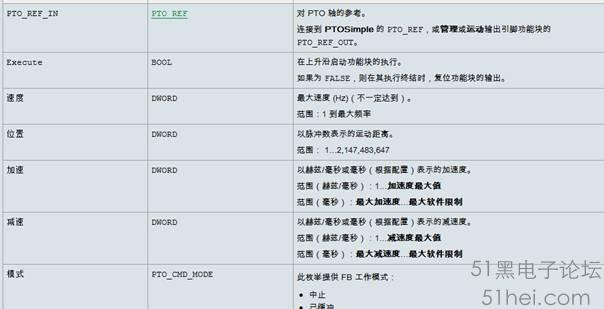
最后方向:0=正方向,1=反方向,2=当前方向。(当加减速度选用的是以毫秒位单位时候,填写加减速度的时候数值不要过大,不然在停止时候会有很长的缓冲时间导致过冲,或者指令使用报错,建议填写软件最小值)
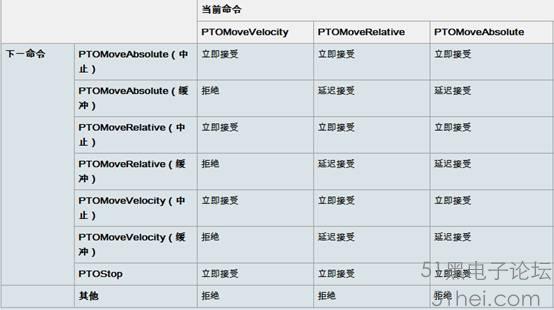
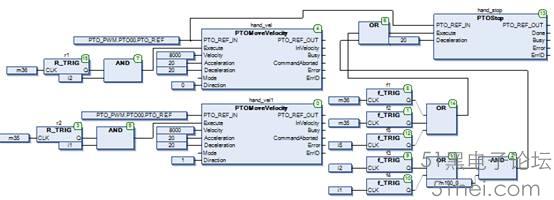
在相关指令引用时候注意: 在速度模式下:一般同方向的速度模式,可以连续更改速度;但是若要方向,必须引用ptostop块,或者让速度减速到零,然后再执行反向的速度模式,不然会报错,引起伺服没有动作。 位移模式:通常可以自由转换,上个命令执行完成后引用上个功能块的done信号触发下个命令即可。 Stop命令:这个命令特别注意。执行完这个命令,正常情况下并不可以立即执行其他命令,就算是done已经输出,但是我们监控ptosimple 的  输出会为false,若此时触发其他命令就会导致报错,从而不会运动。一般我们会采取延时一段时间(一般300ms左右,有时候可能更长),然后才触发其他命令。 其相关命令的执行关系如下: 所以在执行相关命令时候必须理解相关指令之间的关系,再合理构建程序,不然很容易出错,检查起来很麻烦的。另外也要考虑相关命令执行的相关逻辑,以便识别相关执行命令,方便自己编程使用。 附上一段jog控制程序: 欢迎大家交流
|