包括程序与详细的连接图



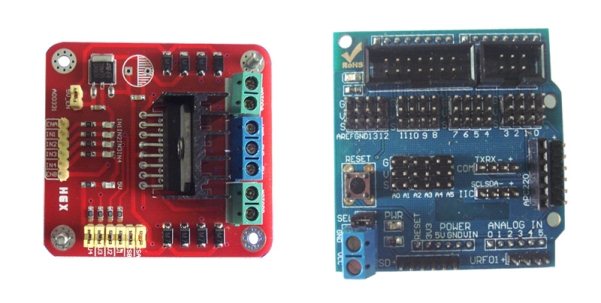
KEYES 自走车接线说明 (请参考程序) 一:电机转向的连线 //***********************定義馬達腳位 int MotorRight1=5; int MotorRight2=6; int MotorLeft1=10; int MotorLeft2=11; 这个是L298N和控制板的接线, L298N上的ENA, ENB分别接到扩展板的V接口(+电源) I1,I2,I3,I4,分别接到扩展板的数字接口 5,6,10,11。(控制电机的正反转) (L298N的电源及和马达的连接请参照 L298N电机驱动板模块介绍)
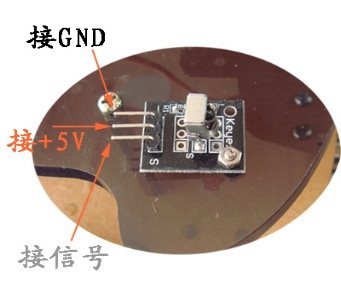
二.红外接收传感器的接线 const int irReceiverPin = 2; //紅外線接收器 OUTPUT 訊號接在 pin 2 红外接收传感器的GND接扩展板的G位接口, 红外接收传感器的+5V接扩展板的+5V接口 红外接收传感器的S接扩展板的数字信号2脚 三.寻线接收传感器的接线
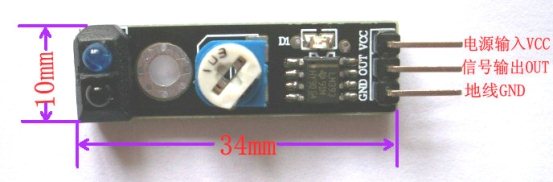
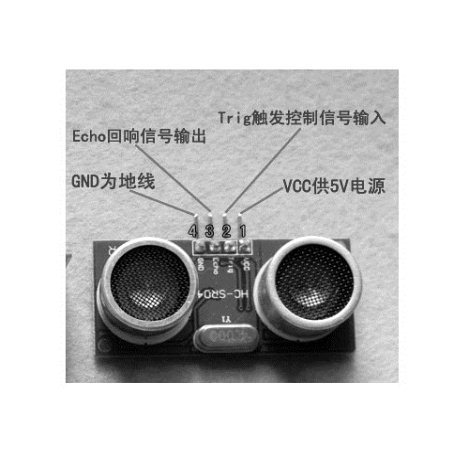
const int SensorLeft = 7; //左感測器輸入腳 const int SensorMiddle= 4 ; //中感測器輸入腳 const int SensorRight = 3; //右感測器輸入腳 三组寻线传感器 第一组信号接扩展板的数字7接口,VCC接扩展板的+5V接口,GND接扩展板的G位接口, 第二组信号接扩展板的数字4接口,VCC接扩展板的+5V接口,GND接扩展板的G位接口, 第三组信号接扩展板的数字3接口,VCC接扩展板的+5V接口,GND接扩展板的G位接口, 四.超声波传感器的接线 int inputPin =13 ; // 定義超音波信號接收腳位rx int outputPin =12; // 定義超音波信號發射腳位'tx 超声波传感器四个脚1,2,3,4分别为 VCC,TRIG,ECHO,GND VCC接扩展板的+5V接口 TRIG接扩展板的数字13接口,作为信号的输入 ECHO接扩展板的数字12接口,作为信号的输出 GND接扩展板的G位接口 五.舵机的接线 myservo.attach(9); // 定義伺服馬達輸出第9腳位(PWM) 舵机三根线按颜色来分分别是灰红黄线,对应的, 灰---GND 接扩展板的G位接口 红---+5V 接扩展板的+5V接口 黄---接信号 接扩展板的数字信号9接口
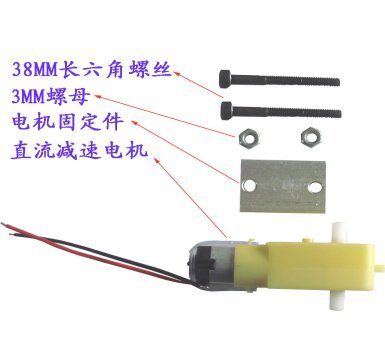
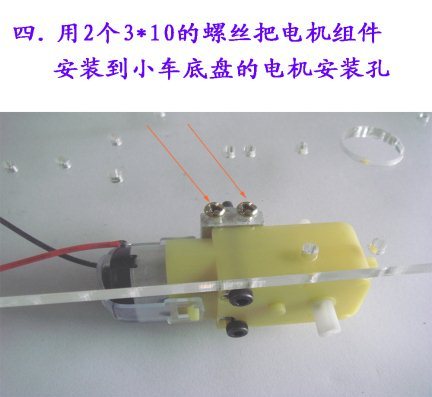
KEYES 自走车安装指南 一.电机部件的安装
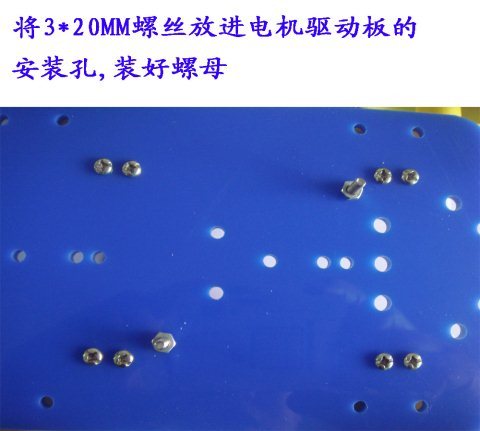
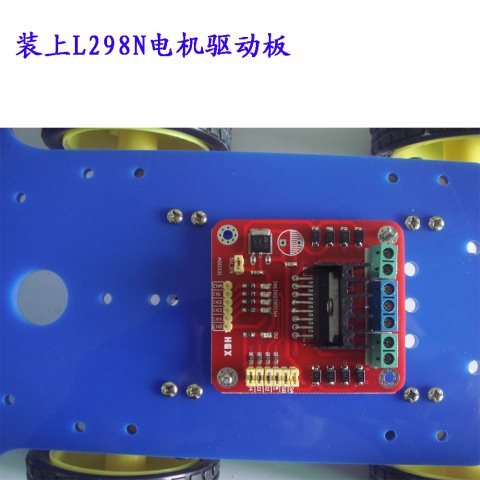
二.电机驱动板的安装
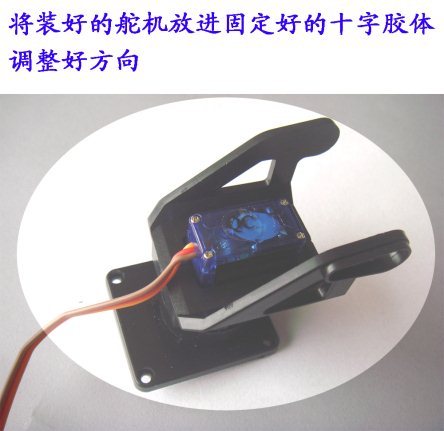
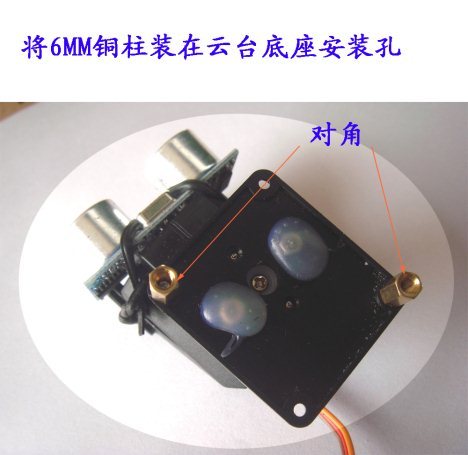
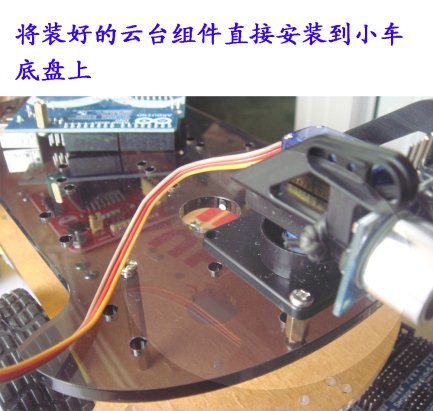
三.云台 舵机 超声波安装图
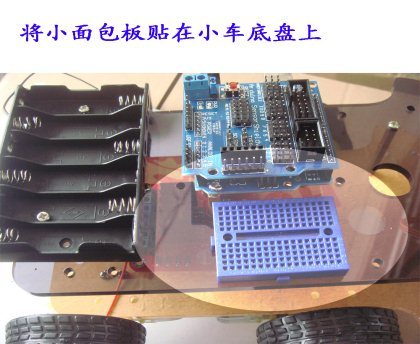
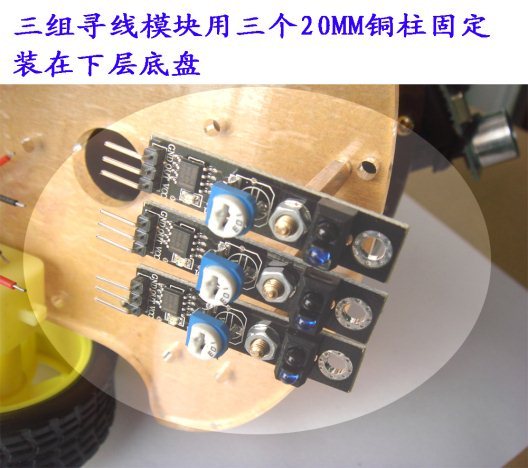
四.控制板部分的安装 五.电池盒的安装 六.小面包板的安装 七.红外接收器的安装 八.寻线模块的安装 KEYES高级自走车使用手冊 功能: - 超声波避障模式,自动躲避障碍物。
- 寻线模式,沿黑线自动行走。
- 红外遥控模式,遥控前进,后退,转圈。
所需材料: - Arduino328控制器一片
- Arduino传感器扩展板一片
- L298N电机驱动板一片
- 红外遥控器加红外接收头一个
- 寻线模块3个
- 4驱动智能车底盘一架
- 舵机一个
- 云台一个
- 超声波模块一个
红外遥控实验前必看:
實驗之前務必須知:
1.先把IRremote函式庫資料夾放進Arduino libraries底下。
2.開啟IrReceive.pde測得自己的紅外線遙控的碼(在Serial Monitor可顯示IRcode)再將IRcode記錄下來,然而到主程式裡面修改成自己的紅外線碼即可。
會用到7個按鈕:
<停止><寻线模式><超声波模式><前進><後退><左轉><右轉>
操控事項:
在程式中設定好自己的紅外線碼,即可動作,再調至寻线模式或是超音波自走模式,你假如想要停止目前模式玩別的模式,直接按你的STOP按鍵即可停止切換其他模式,超音波模式要在偵測方向開始走那時即可按下STOP鍵。

全部资料51hei下载地址:
 高级自走车完整资料.rar
(11.62 MB, 下载次数: 23)
高级自走车完整资料.rar
(11.62 MB, 下载次数: 23)
| 























 赞一个!
赞一个!

