从这里开始看,这些工作是为了寻找更优的路径规划算法做的准备,算法过程正在写。
第1章 路径规划 1.评判全覆盖算法优劣指标: 除草机器人要实现其除草的功能就必须要对整个除草区域进行完全遍历的除草,故为了指导除草机器人成功地完成除草任务,需要一定的评判标准来评价这种功能的好坏。鉴于除草机器人的工作环境和功能的特殊性,全区域范围内完全覆盖的路径规划的评价标准主要有4个: 定义有效割草面积与总面积的比值为覆盖率,Seff代表有效割草面积,Stot代表总的需要割草面积,λ代表覆盖率。  (1) (1)
定义实际遍历的割草面积和有效面积的差值与有效面积的比值为重复率,其中Sact代表实际遍历的割草面积,Seff代表有效面积,γ代表重复率,γ越小,表明算法执行效果越好。  (2) (2)
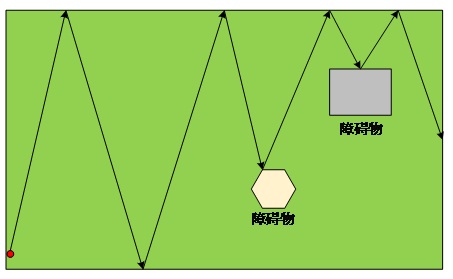
定义除草机器人完成整个工作区域除草工作花费时间T,T越小,表明效率越高,下文中假定每经过一个栅格耗费1个单位的时间。 定义除草机器人完成整个工作区域除草工作所消耗的能量E,E越小,表明节能效果越好,下文中假定每经过一个栅格消耗1个单位的能量。 定义除草机器人不改变原有既定路线为一次遍历,重新规划新路线,出现重复,则遍历次数加1。 (1)随机式路径规划 随机式路径是将割草机器人放置在指定区域的某一任意位置作为起点,朝着某一方向按直线或曲线的轨迹前进,当遇到工作区域的界线或障碍物时,它将以一个固定的角度(比如90o)原地旋转,转弯后继续以原先的方式前进,通过上述的方式不断重复割草,直到把整个区域完全覆盖。 随机式规划在控制上相对容易,但这种方法规划路径具有较高的随机性,实现全区域的覆盖往往需要耗费更多的时间,消耗更多的能量,出现较高的重复率。故随机式路径规划难以满足低重复率、低能耗、高效的要求。 图1 随机式路径规划 (2)梨田式路径规划 犁田式的路径规划是指除草机器人从某一点出发,沿一个具体的方向以直线的形式移动。当除草过程中遇到边界或障碍时,它就会停止前进并在当前位置先将机身旋转90度,然后向前移动一个机身的位置,接着同样保持原地不动再将机身旋转90度,最后继续向前移动。依照这个方法反复迂回,直到把整个区域都遍历过,如图 2 所示。 犁田式路径规划在控制上比较易于通过编程实现,相比随机式路径规划,此方法具有更高的效率和更低的能量消耗。但当障碍物过多过大时,被障碍物遮挡的一侧难以有效达到除草目的,致使覆盖率会明显降低,此时只可通过人为干预以达到正常除草目的。
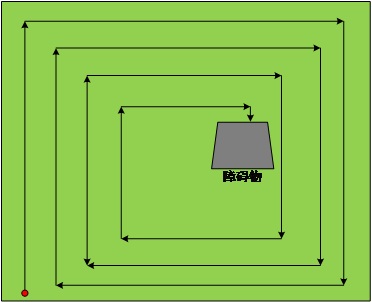
图2 梨田式路径规划 (3)螺旋式路径规划 螺旋式路径规划是指除草机器人在工作区域里先挨着这个区域的里面的边界移动一周(即按螺旋“回”字方式),接着依次逐渐地以减小的形式朝这一个区域中心处移动,当除草机器人到达中心位置处的时候,就实现了对这个区域的完全覆盖,如图 3 所示。 螺旋式路径规划与梨田式路径规划具有相似的缺陷,当目标区域存在较多障碍物时,控制的复杂性上升,同时,为了更好的遍历除草区域,重复率也会有所上升,故螺旋式路径规划仅适用于平整的工作区域。
图 3 螺旋式路径规划 3.1 栅格地图 栅格地图的基本思想是把除草机器人的工作区域分割成相同的网格,每个网格都对应着环境中一个特定的小区域,每当传感器探知到外界环境出现了些许改变时,栅格地图就会及时地更改维护。在采用这个方法对环境地图建立模型时,对于同一个工作环境,划分的网格数量愈高,网格就会愈小,地图的精度就会愈高。当网格划分的比较大时,精确度就会比较低,会出现把非障碍区错记为障碍区的情况;当网格划分的过小时,就会使得所需存储的地图信息比较多,以至于运算就会变得复杂。故当采用栅格法对环境地图进行建模时,要兼顾覆盖率和运算的复杂度来确定网格的大小。 3.2 沿边学习过程 沿边学习是指除草机器人由一个特定的地方开始沿着草坪的边界或着与边界紧挨着的障碍的边界按某一特定方向转一周,在运动的过程中实时地记录除草机器人的位置坐标,然后通过简单的算法就大体上获知除草环境的轮廓及靠边界的障碍物的分布情况,沿边学习的方式如图 4所示,图中橘黄色代表的是障碍,空白部分则代表的是除草机器人需要除草的区域范围,箭头表示的是沿边学习的一个方向。 图 4 沿边学习过程
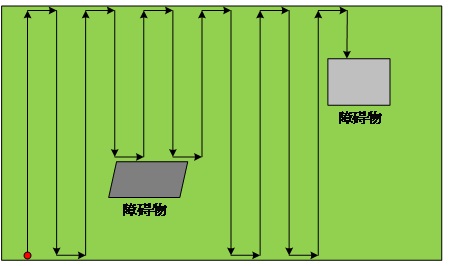
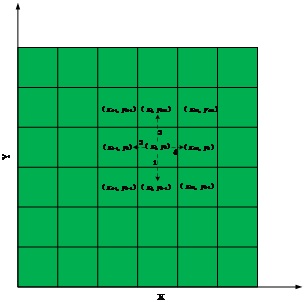
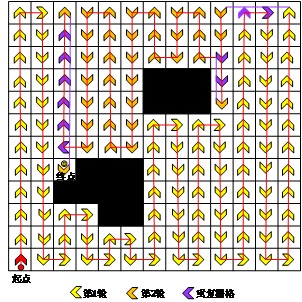
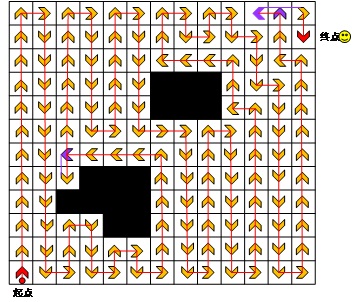
通过沿边学习得到工作区域具体坐标数据,据此建立工作区域数学模型如图5所示,以除草机器人大小为标准将区域进行栅格化,每一个栅格化后的区域都有一个精准的坐标数据(Xi,Yi),将除草机器人放置到起始点(X1,Y1),除草机器人工作过程算法PREC(Precise coverage)描述如下: 1. 除草机器人初始位置(Xi,Yi),完成初始位置的除草并记录下除草位置坐标。 2. 首先判断除草机器人下方栅格(Xi,Yi-1),若该区域为未除草区域,则除草机器人往下运动除草;若该区域为除草完成区域或障碍区域,则判断左侧相邻栅格,若左侧栅格为未除草区域,则除草机器人往左侧运动除草;若该区域为除草完成区域或障碍区域,则判断上侧相邻栅格,即除草优先依次为(Xi,Yi-1)、(Xi-1,Yi)、(Xi,Yi+1)、(Xi+1,Yi),移动除草后记录完成除草的位置坐标。 3. 若与(Xi,Yi)直接相邻的栅格区域均已经除草完成或为障碍区域,则扩大所需判断的搜索范围,依次为(Xi,Yi-2)、(Xi-2,Yi)、(Xi,Yi+2)、(Xi+2,Yi),若依然没有可除草区域,则继续扩大搜索范围,依次为(Xi,Yi-j)、(Xi-j,Yi)、(Xi,Yi+j)、(Xi+j,Yi),此时j≥3,直到搜索至可除草栅格,以最短路径移动至可除草栅格,返回步骤2。 4. 进入到下一个栅格的同时记录已经除草的栅格坐标,重复第2,3步骤,直到遍历完成整个工作区域。 图 5 PREC数学模型 随机设置工作环境为12*13的栅格区域,且在区域内布置两个不同形状、不同大小的障碍区域,栅格总数为156个,其中障碍区域所占栅格面积为15个,需要除草的区域栅格个数为141个。从图6可以看出,梨田式路径规划方式经过2轮路径再规划,即实现了对整个区域的遍历,且重复遍历的栅格个数为10个。 图6 梨田式路径规划 图7为螺旋式路径规划逻辑图,可以看出,螺旋式路径规划方式经过4轮路径再规划,才达到对整个区域的遍历,且重复遍历的栅格个数为13个。说明障碍区域存在的情况下,螺旋式路径规划不能很好地实现流畅的工作过程。 图 7 螺旋式路径规划 图8位PREC路径规划,可以看出,PREC路径规划方式仅需2轮路径再规划,即可对整个区域实现遍历,且重复遍历的栅格个数仅仅为3个。说明障碍区域存在的情况下,PREC路径规划能很好地遍历工作区域,并有很高的工作效率。 图 8 PREC 路径规划 通过对上述几种路径规划逻辑图的比较,各路径规划的评价指标参数如表1所示,从表中可以明显的看出,在重复率、能量消耗、时间等方面,PECN路径规划方式均优于其他几种路径规划方式,尤其的,重复率相较于梨田式降低了5个百分点,相较于螺旋式降低了7.1个百分点,时间和能量消耗相较于梨田式和螺旋式分别降低了4.6和6.5个百分点。表明本文提出的PECN路径规划算法在实现智能机器人除草过程中具有显著的优势,为智能除草机器人的路径规划注入了新鲜血液。 表 1 几种路径规划比较
以上的Word格式文档51黑下载地址:
 智能割草机控制系统.docx
(333.26 KB, 下载次数: 24)
智能割草机控制系统.docx
(333.26 KB, 下载次数: 24)
| 










 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

