С§П°FPGAөДТ»өгРДөГ
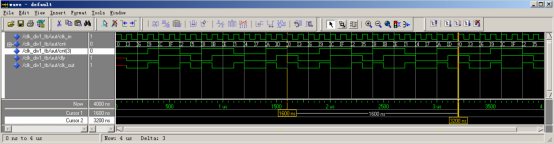
VHDLЧчТө 1ЎўРҙіцПы¶¶өДіМРтЈ¬НЁ№э·ВХж»тПВФШөГіц¶ФУҰөДІЁРОЈ¬Іў·ЦОцЎЈ FPGA¶ФУЪКдИлөДРЕәЕТ»°г¶јТӘҫӯ№эПы¶¶ҙҰАнЈ¬ТФПыіэёЙИЕРЕәЕЎЈ¶ФУЪБҪёцЙиұёЦ®јдөДКэҫЭҙ«КдЈ¬ХвТ»өгПФөГУИОӘЦШТӘЎЈ Пы¶¶Т»°гНЁ№эјЗВјВціеөДёцКэЈ¬¶ФКдИлРЕәЕөДјв·еҝн¶ИҪшРРПЮЦЖЈ¬ҙпІ»өҪФӨ¶ЁөДҝн¶ИЈ¬јҙИПОӘКЗёЙИЕЈ¬ұШРлјУТФВЛіэЈ¬Іҝ·ЦҙъВлИзПВЎЈТтҙЛЈ¬РЕәЕҫӯ№эПы¶¶ИҘіэёЙИЕРЕәЕТФәуЈ¬ұШИ»ІъЙъСУіЩЈ¬СУіЩКұјдУлПөНіҫ§ХсЖөВКТФј°јЖКэВціеёцКэУР№ШЎЈ АэИзЈәЙиПөНіҫ§ХсОӘ40MHzЈ¬Пы¶¶КұјдОӘ4ёцCLKЈ¬Т»ёцВціеКұјдОӘ1/40M=25nsЈ¬ЛщТФРЕәЕСУКұОӘ25*4=100nsЈ¬ИзНј1ЛщКҫЎЈ 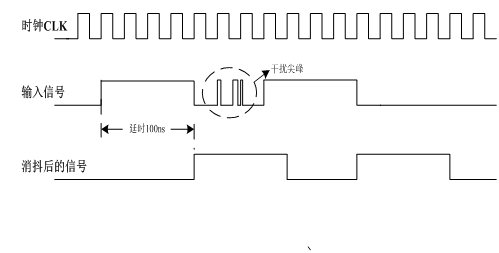 Нј1 РЕәЕПы¶¶КҫТвНј ҙъВлКҫАэЈә ЈЁaЈ©СУКұ4clk - process (gclk,rst) --ИәРЕәЕПы¶¶
- begin
- if rst='1' then
- sig_out<='0';
- elsif gclk'event and gclk = '1' then
- sig_0 <= sig_in;
- sig_1 <= sig_0;
- sig_2 <= sig_1;
- sig_3 <= sig_2;
- if ((sig_3 = sig_2) and (sig_2 = sig_1) and (sig_1 = sig_0) and (sig_0 = sig_in)) then
- sig_out <= sig_3;
- end if;
- end if;
- end process;
·ВХжҪб№ыИзНј2Јә 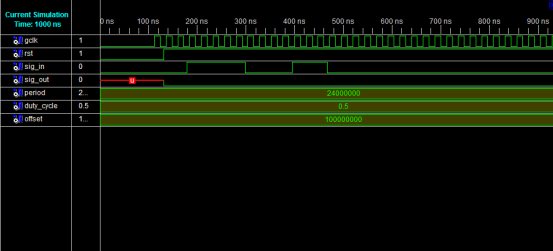
Нј2Пы¶¶іМРт·ВХжНј (b) СУКұ4ms - process (gclk)
- begin
- if rst='1' then
- signal_out<='0';
- psignal<='0';
- ppsignal<='0';
- signal_cnt<=0;
- elsif (gclk='1') and (gclk'event) then
- ppsignal <= psignal;
- psignal <= signal_in;
- if psignal /= ppsignal then
- signal_cnt <= 0;
- else
- signal_cnt <= signal_cnt + 1;
- if signal_cnt > 159999 then ------Пы¶¶КұјдОӘ4ms------
- --if signal_cnt > 99 then
- signal_out <= psignal;
- end if;
- end if;
- end if;
- end process;
·ВХжҪб№ыЈ» 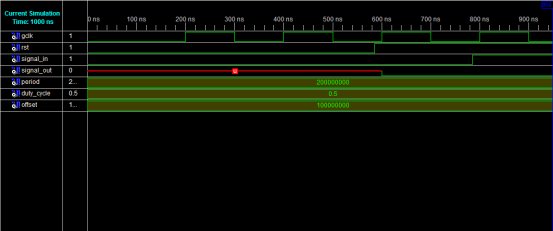
Нј3СУКұ·ВХжНј 2ЎўІвКФФЪІ»Н¬ЦчЖөЎў·ЦЖөПВВЯјӯҙҰАнЙПөДІ»Н¬Ј¬Іў·ЦОцЎЈ ·ЦЖөЖчКЗКэЧЦПөНіЙијЖЦРөД»щұҫөзВ·Ј¬ёщҫЭІ»Н¬ЙијЖөДРиТӘЈ¬ОТГЗ»бУцөҪЕјКэ·ЦЖөЎўЖжКэ·ЦЖөЎў°лХыКэ·ЦЖөөИЈ¬УРКұТӘЗуөИХјҝХұИЈ¬УРКұТӘЗу·ЗөИХјҝХұИЎЈФЪН¬Т»ёцЙијЖЦРУРКұТӘЗу¶аЦЦРОКҪөД·ЦЖөЎЈНЁіЈУЙјЖКэЖч»тјЖКэЖчөДј¶БӘ№№іЙёчЦЦРОКҪөДЕјКэ·ЦЖөј°·ЗөИХјҝХұИөДЖжКэ·ЦЖөЈ¬КөПЦҪПОӘјтөҘЎЈө«¶Ф°лХыКэ·ЦЖөј°өИХјҝХұИөДЖжКэ·ЦЖөКөПЦҪПОӘА§ДСЎЈұҫОДАыУГVHDLУІјюГиКцУпСФЈ¬ҝЙЙијЖБЛТ»ЦЦДЬ№»ВъЧгЙПКцёчЦЦТӘЗуөДҪПОӘНЁУГөД·ЦЖөЖчЎЈ ПЦНЁ№эЙијЖТ»ёцҝЙТФКөПЦ8.5·ЦЖөЈ¬өИХјҝХұИөД17·ЦЖөЈ¬2Ўў4Ўў8Ўў16Ўў32·ЦЖөЈ¬ј°ХјҝХұИОӘ1ЎГ8әН4ЎГ5өД9·ЦЖөөИ¶аЦЦРОКҪ·ЦЖөөД·ЦЖөЖчЎЈ·ЦЖөЖчУЙҙшК№ДЬ¶ЛөДТм»тГЕЎўДЈNјЖКэЖчәНТ»ёц2·ЦЖөЖчЧйіЙЈ¬ұҫЙијЖУГDҙҘ·ўЖчАҙНкіЙ2·ЦЖөөД№ҰДЬЈ¬КөПЦ·Ҫ·ЁКЗЈәҪ«ҙҘ·ўЖчөДQ·ҙКдіц¶Л·ҙАЎ»ШКдИл¶ЛDЈ¬Ҫ«јЖКэЖчөДТ»ёцјЖКэКдіц¶ЛЧчОӘDҙҘ·ўЖчөДКұЦУКдИл¶ЛЎЈёч№ҰДЬДЈҝйөДVHDLУпСФКөПЦИзПВЎЈ 1Ј©.ДЈNјЖКэЖчөДКөПЦ ЎЎЎЎТ»°гЙијЖЦРУГөҪјЖКэЖчКұЈ¬ОТГЗҝЙТФөчУГlpmҝвЦРөДјЖКэЖчДЈҝйЈ¬ТІҝЙТФІЙУГVHDLУпСФЧФјәЙијЖТ»ёцДЈNјЖКэЖчЎЈұҫЙијЖІЙУГVHDLУпСФЙијЖТ»ёцЧоҙуДЈЦөОӘ16өДјЖКэЖчЎЈКдИл¶ЛҝЪОӘЈәК№ДЬРЕәЕenЈ¬ёҙО»РЕәЕclrәНКұЦУРЕәЕclk;Кдіц¶ЛҝЪОӘЈәqaЎўqbЎўqcЎўqdЎЈЖдVHDLУпСФГиКцВФЎЈ ЎЎ2Ј©.ҙшК№ДЬҝШЦЖөДТм»тГЕөДКөПЦ ЎЎЎЎКдИл¶ЛОӘЈәxor_enЈәТм»тК№ДЬЈ¬aәНbЈәТм»тКдИл;Кдіц¶ЛОӘЈәcЈәТм»тКдіцЎЈөұxor_enОӘёЯөзЖҪКұЈ¬cКдіцaәНbөДТм»тЦөЎЈөұxor_enОӘөНөзЖҪКұЈ¬cКдіцРЕәЕbЎЈЖдVHDLУпСФВФЎЈ 3Ј©.·ЦЖө(ҙҘ·ўЖч)өДКөПЦ ЎЎЎЎКдИл¶ЛОӘЈәКұЦУРЕәЕclkЈ¬КдИлРЕәЕd;Кдіц¶ЛОӘЈәqЈәКдіцРЕәЕaЈ¬q1ЈәКдіцРЕәЕa·ҙЎЈЖдVHDLУпСФВФЎЈ ТФПВКЗјёЦЦ·ЦЖөЖчөД·ЦОцЈә ЕјКэ·ЦЖөЖч ЖөЧоТЧУЪКөПЦЈ¬УыКөПЦХјҝХұИОӘ50%өДЕјКэN·ЦЖөЈ¬Т»°гАҙЛөУРБҪЦЦ·Ҫ°ёЈәЈ¬·ЦЖөЖчөД»щҙЎКЗјЖКэЖчЈ¬ЙијЖ·ЦЖөЕјКэ·ЦN/2-1КұЈ¬Ҫ«КдіцөзЖҪҪшРРТ»ҙО·ӯЧӘЈ¬Н¬КұёшјЖКэЖчТ»ёцёҙО»РЕәЕЈ¬ИзҙЛСӯ»·ПВИҘЈ»¶юКЗөұјЖКэЖчКдіцОӘ0өҪN/2-1КұЈ¬КұЦУКдіцОӘ0»т1Ј¬јЖКэЖчКдіцОӘN/2өҪN-1КұЈ¬КұЦУКдіцОӘ0»т1Ј¬јЖКэЖчКдіцОӘN/2өҪN-1КұЈ¬КұЦУКдіцОӘ0»т1Ј¬јЖКэЖчКдіцОӘN-1КұЈ¬ёҙО»јЖКэЖчЈ¬ИзҙЛСӯ»·ПВИҘЎЈ Нј4 ЕјКэ·ЦЖө·ВХжҪб№ыНј Нј 5 ЕјКэ·ЦЖө·ВХжҪб№ыНј ЖжКэ·ЦЖөЖч КөПЦ·З50%ХјҝХұИөДЖжКэ·ЦЖөЈ¬ИзХјҝХұИОӘ20%Ўў40%Ўў60%Ўў80%өД5·ЦЖөЖчЈ¬ҝЙТФІЙУГАаЛЖЕјКэ·ЦЖөөДөЪ¶юЦЦ·Ҫ°ёЈ»ө«Из№ыКөПЦХјҝХұИОӘ50%өДЖжКэ·ЦЖөЈ¬ҫНІ»ДЬК№УГЕјКэ·ЦЖөЦРЛщІЙУГөД·Ҫ°ёБЛЎЈ ПВГжҫНТФКөПЦХјҝХұИ40%өД5·ЦЖө·ЦЖөЖчОӘАэЈ¬ЛөГч·З50%ХјҝХұИөДЖжКэ·ЦЖөЖчөДКөПЦЎЈёГ·ЦЖөЖчөДКөПЦ¶ФУЪОТГЗКөПЦ50%ХјҝХұИөД·ЦЖөЖчУРТ»¶ЁөДҪијшТвТеЎЈТ»ПВКЗЖжКэ·ЦЖө·ВХжҪб№ыНјЎЈ Нј6 ХјҝХұИОӘ40%өД5·ЦЖө·ВХжІЁРО °лХыКэ·ЦЖөЖч ҪцҪцІЙУГКэЧЦ·ЦЖөЈ¬І»ҝЙДЬ»сөГХјҝХұИОӘ50%өДN+0.5·ЦЖөЈ¬ОТГЗЦ»ҝЙТФЙијЖіцХјҝХұИОӘ(M+0.5)/(N+0.5)»тХЯM/(N+0.5)өД·ЦЖөЖчЈ¬MРЎУЪNЎЈХвЦЦ°лХыКэ·ЦЖө·Ҫ·ЁКЗ¶ФКдИлКұЦУҪшРРІЩЧчЈ¬ИГјЖКэЖчјЖКэөҪДіТ»ёцКэЦөКұЈ¬Ҫ«КдИлКұЦУөзЖҪҪшРРТ»ҙО·ҙЧӘЈ¬ХвСщЈ¬ёГјЖКэЦөЦ»ұЈіЦБЛ°лёцКұЦУЦЬЖЪЈ¬ТтҙЛКөПЦ°лХыКэ·ЦЖөЎЈ ИзЙПЛщКцЈ¬ХјҝХұИОӘ50%өДЖжКэ·ЦЖөҝЙТФ°пЦъОТГЗКөПЦ°лХыКэ·ЦЖөЈ¬Ҫ«ХјҝХұИОӘ50%өДЖжКэ·ЦЖөУлҙэ·ЦЖөКұЦУТм»төГөҪјЖКэВціеЈ¬ПВГжөДҙъВлҫНКЗТАҝҝХјҝХұИОӘ50%өД5·ЦЖөКөПЦ2.5·ЦЖөЖчөДЎЈ·ВХжҪб№ыИзНјЛщКҫЎЈ Нј7 2.5·ЦЖө·ВХжІЁРО РЎКэ·ЦЖөЖч РЎКэ·ЦЖөКЗНЁ№эҝЙұд·ЦЖөәН¶аҙОЖҪҫщөД·Ҫ·ЁКөПЦөДЎЈАэИзТӘКөПЦ4.7·ЦЖөЈ¬Ц»ТӘФЪ10ҙО·ЦЖөЦРЈ¬Чц7ҙО5·ЦЖөЈ¬3ҙО4·ЦЖөҫНҝЙТФөГөҪЎЈФЩИзТӘКөПЦ5.67·ЦЖөЈ¬Ц»ТӘФЪ100ҙО·ЦЖөЦРЈ¬Чц67 6·ЦЖөЈ¬33ҙО5·ЦЖөјҙҝЙЎЈҝјВЗөҪРЎКэ·ЦЖөЖчТӘҪшРР¶аҙОБҪЦЦЖөВКөД·ЦЖөЈ¬ұШРлЙи·ЁҪ«БҪЦЦ·ЦЖөҫщФИЎЈұн1ТФ2.7·ЦЖөОӘАэЈ¬РЎКэІҝ·ЦҪшРРАЫјУЈ¬Из№ыҙуУЪөИУЪ10Ј¬ФтҪшРР3·ЦЖөЈ¬Из№ыРЎУЪ10Ј¬ҪшРР2·ЦЖөЎЈ ·ВХжІЁРОИзНј ЛщКҫЈ¬ОТГЗҝЙТФЗеіюөДҝҙөҪ2.7·ЦЖөөДКөПЦЎЈ°ҙХХХјҝХұИөД¶ЁТеЈ¬ёГ·ЦЖөЖчөДХјҝХұИУҰОӘ10/27ЎЈ Нј8 2.7·ЦЖө·ВХжІЁРО ·ЦКэ·ЦЖөЖч Ҫ«РЎКэ·ЦЖөөД·Ҫ·ЁҪшРРА©Х№Ј¬ҝЙТФөГөҪРОИзM*(L/N) өД·ЦКэ·ЦЖөөД·Ҫ·ЁЈ¬АэИзЈ¬2*(7/13)өИУЪ·ЦДёөДЈ¬ҪшРР·ЦЖөЈ¬Ц»ТӘФЪ13ҙО·ЦЖөЦРЈ¬ҪшРР7ҙО3·ЦЖөЈ¬6ҙО2·ЦЖөҫНҝЙТФөГөҪЎЈН¬СщЈ¬ОӘБЛҪ«БҪЦЦ·ЦЖөҫщФИЈ¬Ҫ«·ЦЧУІҝ·ЦАЫјУЈ¬РЎУЪ·ЦДёөДЈ¬ҪшРРM·ЦЖөЈ¬ҙуУЪ(M+1)·ЦЖөЎЈұн2ПФКҫБЛ2*(7/13) өД·ЦЖөҙОРтЎЈ ·ВХжІЁРОИзНј11ЛщКҫЎЈПФИ»Ј¬ёГ·ЦЖөЖчөДХјҝХұИОӘ13/33ЎЈ Нј9 33/13·ЦЖөЖч·ВХжІЁРО »э·Ц·ЦЖөЖч »э·Ц·ЦЖөЖчУГУЪКөПЦРОИз өД·ЦЖөЈ¬АэИз8/3·ЦЖөЎЈОТГЗөұИ»ҝЙТФК№УГЙПГжМбөҪөД·ЦКэ·ЦЖөөД·Ҫ·ЁЈ¬ө«¶ФУЪХвЦЦРОКҪөД·ЦЖөЈ¬К№УГ»э·Ц·ЦЖөөД·Ҫ·ЁЧЫәПНщНщХјУГёьЙЩөДFPGAЧКФҙЎЈ өД·ЦЖөЈ¬АэИз8/3·ЦЖөЎЈОТГЗөұИ»ҝЙТФК№УГЙПГжМбөҪөД·ЦКэ·ЦЖөөД·Ҫ·ЁЈ¬ө«¶ФУЪХвЦЦРОКҪөД·ЦЖөЈ¬К№УГ»э·Ц·ЦЖөөД·Ҫ·ЁЧЫәПНщНщХјУГёьЙЩөДFPGAЧКФҙЎЈ »э·Ц·ЦЖө·Ё»щУЪПВКцФӯАнЈәТ»ёцmО»өД¶юҪшЦЖКэЧЦГҝҙОАЫјУNЈ¬јЩ¶ЁАЫјУxҙОАЫјУЦөЧоөНmО»»ШөҪ0Ј¬Н¬Кұі¬№э ҙОЈ¬ДЗГҙЈ¬өұЗ°АЫјУөДКэЧЦУҰёГКЗ ҙОЈ¬ДЗГҙЈ¬өұЗ°АЫјУөДКэЧЦУҰёГКЗ Ј»ГҝФҪ№э Ј»ГҝФҪ№э Т»ҙОЈ¬ЧоёЯО»ұд»Ҝ 2 ҙОЈ¬ЛщТФЈ¬АЫјУ x ҙОЈ¬ЧоёЯО»ұд»Ҝ 2yҙОЈ¬өГөҪ Т»ҙОЈ¬ЧоёЯО»ұд»Ҝ 2 ҙОЈ¬ЛщТФЈ¬АЫјУ x ҙОЈ¬ЧоёЯО»ұд»Ҝ 2yҙОЈ¬өГөҪ ·ЦЖөөД·ЦЖөЖчЈ¬АэИзЈ¬ИЎmОӘ4Ј¬NОӘ3Ј¬өұАЫјУ16ҙОКұЈ¬АЫјУЦөОӘ48Ј¬ЧоөНmО»ұд»ШөҪ0Ј¬Н¬КұФҪ№э16ИэҙОЈ¬ЧоёЯО»ұд»Ҝ6ҙОЈ¬УЙҙЛөГөҪ16/6=8/3·ЦЖөөД·ЦЖөЖчЎЈ ·ЦЖөөД·ЦЖөЖчЈ¬АэИзЈ¬ИЎmОӘ4Ј¬NОӘ3Ј¬өұАЫјУ16ҙОКұЈ¬АЫјУЦөОӘ48Ј¬ЧоөНmО»ұд»ШөҪ0Ј¬Н¬КұФҪ№э16ИэҙОЈ¬ЧоёЯО»ұд»Ҝ6ҙОЈ¬УЙҙЛөГөҪ16/6=8/3·ЦЖөөД·ЦЖөЖчЎЈ ·ЦЖө·ВХжҪб№ыИзНјЛщКҫЎЈ Нј10 »э·Ц·ЦЖө·ВХжІЁРО 3ЎўРҙіцТмІҪҙ®РРНЁРЕөД·ўЛНУлҪУКХіМРтЈ¬Іў·ЦОцЎЈ ТмІҪҙ®РРКэҫЭҙ«КдҫЯУРЙијЖјтөҘЎўҙ«КдОИ¶ЁөИУЕөгЎЈЖдБҪёцЦчТӘІОКэКЗІЁМШВКәНКэҫЭО»ёсКҪЎЈКэҫЭО»ёсКҪУЦіЖЦЎёсКҪЈ¬Т»°г°ьә¬Т»ёцЖрКјО»ЈЁВЯјӯ0Ј©Ј¬Т»ёцЦХЦ№О»ЈЁВЯјӯ1Ј©ТФј°РЈСйО»ЎЈФЪ·ўЛНҝХПРКұЈ¬ЧЬПЯТ»°гҙҰУЪВЯјӯ1ЧҙМ¬ЎЈХвСщөұҪУКХ¶ЛјмІвөҪЧЬПЯЙПУЙёЯөҪөНөДөзЖҪМшұдЈ¬јҙИПОӘКЗКэҫЭҝӘКјҙ«КдЎЈІЁМШВККЗУГАҙФј¶ЁНЁРЕЛ«·ҪөДНЁРЕЛЩВКЈ¬Т»°гНЁ№э¶ФПөНіКұЦУҪшРР·ЦЖөАҙКөПЦЈ¬RS-232РӯТйЦРЈ¬іЈУГөДІЁМШВКУР115200Ўў9600өИЈ¬RS-422УлRS-232ФӯАн»щұҫПаН¬Ј¬Ц»КЗФЪҙ«КдПЯВ·ЙПЈ¬ОӘБЛҝ№ёЙИЕЈ¬ІЙУГБЛІо·Ц·ҪКҪЎЈ ФЪFPGAУҰУГБмУт Ј¬ҙ®РРКэҫЭҙ«КдТ»°гІЙУГ422ЧЬПЯЎЈНЁ№э¶ФПөНіҫ§Хс·ЦЖөЈ¬өГөҪ¶ФУҰөДІЁМШВКЈ¬ұИИз¶Ф40MHzҫӯРР4·ЦЖөЈ¬өГөҪ10MBitөДҙ«КдЛЩВКЎЈҪвВл¶Л»бёщҫЭФӨПИЙи¶ЁөДІЁМШВКЈ¬¶ФКұЦУҪшРР·ЦЖөЈ¬ГҝёфПаөИКұјд¶БИЎЧЬПЯЙПөДТ»О»КэҫЭЎЈБчіМИзПВЈәФЪјмІвөҪЖрКјО»өНөзЖҪЦ®әуЈ¬ҪУКХ¶ЛЈЁјҙҪвВл¶ЛЈ©ГҝёфТ»О»КұјдЈ¬ІЙјҜЧЬПЯЙПөДөзЖҪЈ¬ІўРҙИлТЖО»јДҙжЖчЦРЈ¬ЦұөҪҪ«Т»ЦЎКэҫЭИ«ІҝҪУКХЈ¬И»әуЕР¶ПРЈСйО»Ј¬Из№ыХэИ·Ј¬ФтҪУКХЎўұаЦЎЈ¬·сФтЈ¬¶ӘЖъЎЈ УЙУЪКЬОВ¶ИөИТтЛШөДУ°ПмЈ¬ҫ§Хс»бІъЙъОуІоЈ¬ҙ®РРКэҫЭФЪҙ«Кд№эіМЦРЈ¬ҝЙДЬ»бКЬөҪёЙИЕ¶шІъЙъГ«ҙМЎЈЛщТФФЪТ»Р©¶ФКэҫЭЧјИ·¶ИТӘЗуұИҪПёЯөДіЎәПЈ¬ҫНөГҝјВЗҙ®РРКэҫЭҙ«КдөДИЭҙнДЬБҰЎЈ¶ФУЪХвЦЦЗйҝцЈ¬өЪТ»ЦЦ·Ҫ·ЁНЁіЈ»бІЙИЎ¶ФЧЬПЯЙПөДТ»О»·ЦұрІЙјҜИэҙОЈ¬ұИҪПөГөҪөДИэёцөзЖҪЈ¬Ҫш¶шөГөҪёГО»ҝЙРЕ¶ИёьёЯөДЦөЈ¬ИзНј2ЛщКҫЈ»өЪ¶юЦЦ·Ҫ·ЁФт»бҪ«өзЖҪөДІЙјҜөг·ЕФЪГҝТ»О»өДҝҝҪьЦРјдөДО»ЦГЈ¬НЁ№эјЖЛгҫ§ХсөДЧоҙуОуІоЈ¬ФтҝЙТФјЖЛгіцПөНіөДЧоҙуИЭҙнДЬБҰЎЈЙиҫ§ХсОуІо5%Ј¬ЖөВКОӘ40MHzЈ¬1/40MHz=25ns,25*0.05=1.25ns,ЙиІЁМШВКОӘ4Mbit/s,ЛщТФ¶ФУЪ40bitТ»ЦЎөДҙ®РРКэҫЭЈ¬АЫ»эОуІоЧоҙу»бУР1.25*40*4*50%=100ns,¶шұИМШО»ҝнЦ»УР100nsЈ¬ЛщТФУРҝЙДЬ»б·ўЙъҙнО»ЎЈ 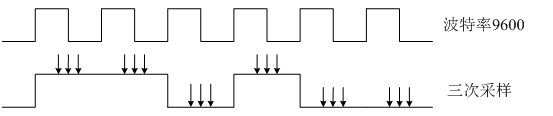 Нј11 ¶аҙОІЙСщјхРЎОуІоКҫТвНј Нј11 ¶аҙОІЙСщјхРЎОуІоКҫТвНј
Іҝ·ЦҙъВлИзПВ ЈЁaЈ©422ҙ®РР·ўЛН
- process (pClock, pReset) --№ЯЧйРЕәЕФҙҝШЦЖЦчҪшіМ
- begin
- if pReset = '1' then
- ch_ClearBusyFlag <= '1';
- ch_tx <= '1';
- ch_send_reg <= "0000000000000000000000000000000000000000";
- ch_st <= 0;
- ch_clock_fp <= 0;
- elsif (pClock='1') and (pClock'event) then
- if ch_st = 0 then --јаІвУРОЮКэҫЭ·ўЛН
- if (ch_s_busy_flag = '1') then
- ch_send_reg <= ch_send_buf; --¶БИЎТӘ·ўЛНөДКэөҪјДҙжЖч
- ch_ClearBusyFlag <= '0'; --ЦГГҰұкЦҫЗеБг
- ch_bit_counter <= 0;
- ch_clock_fp <= 0;
- ch_st <= 1;
- else
- ch_st <= 0;
- end if;
- elsif ch_st = 1 then --ҙ®РР·ўЛН
- ch_clock_fp <= ch_clock_fp + 1; --0 - 57, ГҝО»57ёцКұЦУЈ¬№І12О»Ј¬1ЖрКјЈ¬1НЈЦ№Ј¬2ҝХПР
- if ch_clock_fp = 1 then
- ch_tx <= ch_send_reg(39 - ch_bit_counter);
- elsif ch_clock_fp = 2 then
- if ch_bit_counter = 39 then
- ch_tx <= '1';
- ch_st <= 0; --МшЧӘөҪјаІвbusyұкЦҫЈ¬өИҙэ·ўЛНПВТ»ёцКэ
- else
- ch_bit_counter <= ch_bit_counter + 1;
- end if;
- elsif ch_clock_fp = 3 then
- if ch_bit_counter = 5 then
- ch_ClearBusyFlag <= '1'; --ГҰұкЦҫЗеБгҪбКшЈ¬4ёцclkЈ¬ПЈНыЗ°Т»ҪшіМІ»»бјаІв¶ӘК§
- end if;
- end if;
- end if;
- end if;
- end process;
(b) 422ҙ®РРҪУКХ
******************************************************************
--ГьБоҪУКХЦчҝШЦЖҪшіМ**ТмІҪҪУКХЈ¬40О»
·ВХжҪб№ыЈә 
Нј12ТмІҪҙ®РРНЁРЕөД·ўЛНУлҪУКХ 4ЎўРҙіцPCMНЁРЕөД·ўЛНУлҪУКХіМРтЈ¬Іў·ЦОцЎЈ PCMВціеұаВлөчЦЖКЗҪ«ДЈДвРЕәЕЧӘ»»іЙ¶юҪшЦЖКэЧЦРЕәЕөДұаВл№эіМЎЈФЪОЮПЯТЈІвПөНіЦРЈ¬ТЈІвІЙұаЖч¶Ф¶аВ·ДЈДвРЕәЕНЁ№эМШ¶ЁөДЛіРтЈЁЦЎҪб№№Ј©ҪшРРДЈКэЧӘ»»ІЙСщЈ¬И»әуФЩҪ«ІЙөГөДPCMВлІўҙ®ЧӘ»»Ј¬ҙ®РРЛНЦБОЮПЯ·ўЙд»ъ·ўЙдЎЈөШГжХҫНЁ№эОЮПЯҪУКХ»ъҪУКХЎЈҪвВләуөДPCMВлКЗТ»ёцУЙ¶юҪшЦЖКэ№№іЙөДҙ®РРРтБРЎЈөШГжҪУКХЙиұёөДЦчТӘИООсКЗҪ«ҙ®РРPCMВлЦРөДКэҫЭҪвөчіцАҙЈ¬ХвҫНРиТӘёщҫЭPCMВлБчЦРМШ¶ЁөДН¬ІҪВлИ·¶ЁКэҫЭөДЖрКјО»Ј¬ФЪО»РЕәЕұд»ҜКұөДЙПЙэСШЈЁ»тПВҪөСШЈ©°СPCMВлБчөДО»Н¬ІҪРЕәЕ·ЦАліцАҙЈ¬ФЩНЁ№эҙ®РРКэҫЭөҪІўРРКэҫЭөДЧӘ»»°СКэҫЭІўРРКдіцЎЈ PCMВлөДҙ®ІўЧӘ»»·ЦОӘИэІҪЈ¬өЪТ»ІҪКЗМбИЎН¬ІҪРЕәЕЈ¬өЪ¶юІҪКЗМбИЎЦЎН¬ІҪРЕәЕЈ¬өЪИэІҪКЗёщҫЭТСөГөҪөДО»Н¬ІҪәНЦЎН¬ІҪНкіЙЧЦН¬ІҪәНҙ®ІўЧӘ»»ЎЈ PCMВлФЪ·ўЛНТФј°ҪУКХЈЁҪвВлЈ©№эіМЦРЈ¬¶ј»бУГЦЎН¬ІҪәНВлН¬ІҪ¶ФPCMВлҪшРРН¬ІҪЈ¬УРР©»№»бУГөҪВ·Н¬ІҪРЕәЕЈ¬ИзНј13ЛщКҫЎЈТ»°гКЗPCMВлҪУКХ¶Л·ўЛНН¬ІҪРЕәЕЈЁјҙЦЎН¬ІҪЎўВлН¬ІҪәНВ·Н¬ІҪЈ©ЎЈPCMВл·ўЛН¶ЛёщҫЭҪУКХөҪөДН¬ІҪРЕәЕКдіцPCMВлЈ¬ұИИзФЪВлН¬ІҪөДЙПЙэСШ»тХЯПВҪөСШёшіцКэҫЭЈ¬ҪУКХ¶ЛФтёщҫЭЧФјә·ўіцөДН¬ІҪРЕәЕҪУКХPCMВлЎЈФЪКөјККэҫЭҙ«Кд№эіМЦРЈ¬ҝјВЗөҪРЕәЕөДСУКұЈ¬Т»°г·ўЛН¶ЛФЪВлН¬ІҪЙПЙэСШёшіцPCMКэҫЭЈ¬ҪУКХ¶ЛФЪВлН¬ІҪПВҪөСШ¶БИЎPCMКэҫЭЈ¬¶шЦЎН¬ІҪТ»°гУГЧчЦЎёҙО»Ј¬В·Н¬ІҪУГЧчЧЦҪЪёҙО»Ј¬ИзНј14ЛщКҫЎЈ ҪУКХ¶ЛҪУКХөҪPCMКэҫЭәуЈ¬Т»°гТӘҫӯ№эұаЦЎЈ¬јУЙПЦЎН·ЎўЦЎОІТФј°ЦЎјЖКэЈ¬И»әуЙПҙ«ёшјЖЛг»ъЎЈјЖЛг»ъФтҪ«КэҫЭҪв°ьЈ¬МбИЎіцУРУГөДРЕПўЎЈ 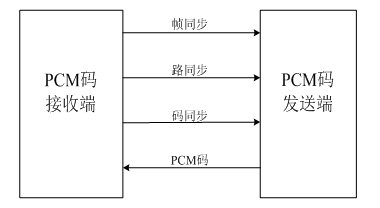
Нј13 PCMВлҪУКХ·ўЛН№эіМЦРөДРЕәЕКҫТвНј 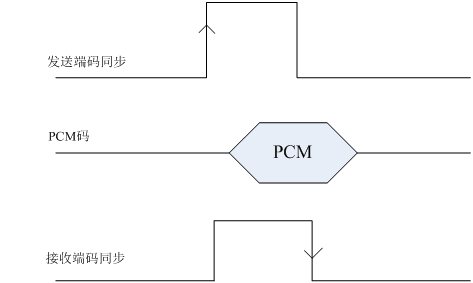
Нј14 Н¬ІҪРЕәЕКҫТвНј Іҝ·ЦІОҝјҙъВлЈә ЈЁaЈ©ЦЎН¬ІҪЎўВ·Н¬ІҪЎўВлН¬ІҪРЕәЕөДІъЙъ
(b) PCMВлҪУКХ
- process (f_mtb, rst, f_ztb)
- begin
- if rst = '1' or f_ztb='1' then
- q_state<=q0;
- f_data<="00000000";
- f_flag<='0';
- elsif f_mtb'event and f_mtb = '0' and f_ztb='0' then
- case q_state is
- when q0 =>
- f_data(7)<=not qun_afxd;
- f_flag<='0';
- q_state<=q1;
- when q1 =>
- f_data(6)<=not qun_afxd;
- q_state<=q2;
- when q2 =>
- f_data(5)<=not qun_afxd;
- q_state<=q3;
- when q3 =>
- f_data(4)<=not qun_afxd;
- q_state<=q4;
- when q4 =>
- f_data(3)<=not qun_afxd;
- q_state<=q5;
- when q5 =>
- f_data(2)<=not qun_afxd;
- q_state<=q6;
- when q6 =>
- f_data(1)<=not qun_afxd;
- q_state<=q7;
- when q7 =>
- f_data(0)<=not qun_afxd;
- f_flag<='1';
- q_state<=q0;
- when others =>
- q_state<=q0;
- end case;
-
- end if;
- end process ;
(c) PCMВлұаЦЎ
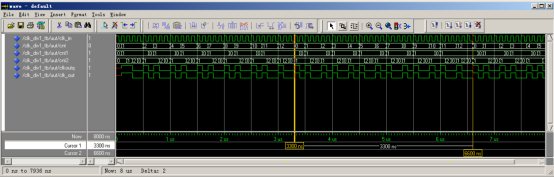
·ВХжҪб№ыЈә 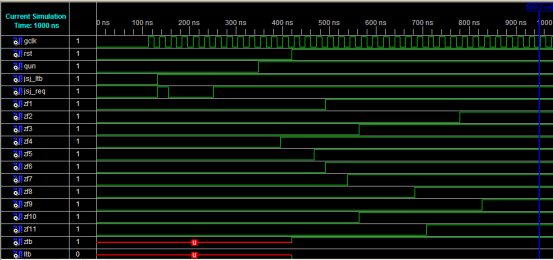

Нј15PCMНЁРЕөД·ўЛНУлҪУКХ·ВХжНј
НкХыөДWordёсКҪОДөө51әЪПВФШөШЦ·Јә
 VHDLРЕәЕПы¶¶.doc
(749.5 KB, ПВФШҙОКэ: 10)
VHDLРЕәЕПы¶¶.doc
(749.5 KB, ПВФШҙОКэ: 10)
| 




 №ЬАнФұQQ:125739409;јјКхҪ»БчQQИә281945664
№ЬАнФұQQ:125739409;јјКхҪ»БчQQИә281945664








 QQәГУСәНИә
QQәГУСәНИә QQҝХјд
QQҝХјд МЪС¶ОўІ©
МЪС¶ОўІ© МЪС¶ЕуУС
МЪС¶ЕуУС КХІШ
КХІШ МФМы
МФМы ¶Ҙ
¶Ҙ ІИ
ІИ