直流电机具有良好的启动和调速性能,被广泛地应用于对启动和调速有较高要求的拖动系统。本论文主要介绍了在基于FPGA用PWM实现直流电机调整的基本方法中PID算法及原理,直流电机调速的相关知识。简单介绍了基于FPGA用硬件产生PWM信号的途径。然后结合PID算法对整个系统进行闭环控制设计,整合到硬件电路中对直流电机调速的实现提供了一种有效的途径。
在现代工业中,各种生产机械根据其工艺特点,对拖动的电动机提出了各种不同的要求,有的要求能迅速启动、制动和反转;有的要求多台电动机之间的转速按一定的比例协调运动;有的要求电动机达到极慢的稳速运动;有的要求电动机起、制动平稳,并能准确的停在给定的位置。可见各种拖动系统都是通过控制转速从而控制转矩来实现的。与交流电动机相比,直流电动机由于调速性能好、静差率小、稳定性好以及具有良好的动态性能、运行效率高等优点,因此在相当长的时期内,高性能的调速系统几乎都采用了直流调速系统。 FPGA作为新型的大规模可编程数字集成电路器件,它充分利用计算机辅助设计技术进行器件的开发与应用。用户借助于计算机不仅能自行设计专用集成电路芯片,还可在计算机上进行功能仿真和实时仿真,及时发现问题,调整电路,改进设计方案。这样,设计者不必动手搭接电路、调试验证,只须在计算机上操作很短的时间,即可设计出与实际系统相差无几的理想电路。而且,FPGA器件采用标准化结构,体积小、集成度高、功耗低、速度快,可无限次反复编程,因此,成为科研产品开发及其小型化的首选器件,其应用极为广泛。 本文主要研究的问题是,分析直流电机的调速方式,利用当前先进的数字技术和现代控制理论,在消除干扰环境中精确控制电机的起、制动,调节转速,以提高可靠性、降低成本。最常用的直流调速技术是脉宽调制(PWM) 直流调速技术,它具有调速精度高、响应速度快、调速范围宽和耗损低等特点。系统采用PWM调节实现对电机的调速,采用红外发射接收对管采集电机转速。FPGA系统内部进程工作在并行的状态下,各子进程相互独立,输出的PWM波形具有频率高,占空比调节步精密的特点。高频率的PWM波形对直流电机工作的稳定起着极其重要的作用,尤其在高负载的调速系统中体现的优越性极其明显,频率越高电机运行越平稳。另外,对PWM 波形输出占空比的调节步进细分的特点大大的扩大了调速系统的调速范围。本设计中主要研究FPGA产生PWM波形的优越性并对其进行验证,并且针对FPGA系统进行等精度频率测量的高精度性进行验证。 二 直流电机2.1 直流电机控制系统 系统主要由PID控制器、光电测速器(编码器)、PWM脉冲宽度调制器、直流电机等组成。其中控制器采用数字PID控制器;采样采用光电编码器;PWM脉冲宽度调制器对模拟信号电平进行数字编码;光电编码器采用透射型带光栅盘的光电断续器。数学模型图如图2-1所示。 图2-1 电机控制系统原理框图 2.2 直流电机的数学模型建立 (1)直流电机电压与输出转速关系图: 图2-2 电机电压输出与转速关系 直流电机电压与输出转速之间的传递函数为:  (2-1) 本论文采用永磁直流齿轮减速电机,型号为Zheng Gear-Box Motor ZGB37RG。有关参数表如表2-1所示。 表2-1 | | | | | | | | | | | | | | | V/(rad s) s) | | | | | | | | | | | | | | | | |
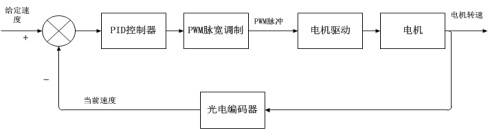
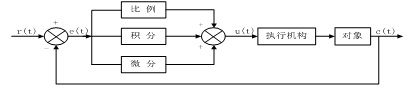
 ;  。 由此可知  ,所以可将传递函数近似为:  (2-2) 代入电机参数得电压输入与输出转速之间的传递函数关系为  (2-3) 以低电压、低转速以及大转矩的实际直流电机为仿真背景,选额定电压24V,减速比1/47.5,空载转速100r/min,额定转速70r/min,给定转速60r/min。 三PID算法 3.1 PID算法 PID是Proportional(比例)、Integral(积分)、Differential(微分)三者的缩写,PID控制是连续系统中技术最成熟、应用最广泛的一种控制算法。比例控制是对当前偏差的反应,积分控制是基于新近错误总数的反应,而微分控制则是基于错误变化率的反应。PID控制实质是测量偏差、纠正偏差,并且根据输入的偏差值,按比例、积分、微分的函数关系进行乘、加运算,把运算结果用以输出控制  。 3.1.1 模拟PID 在模拟控制系统中,调节器最常用的控制规律是PID控制,常规PID控制系统原理框图如图3-1所示,系统由模拟PID调节器、执行机构及控制对象组成。
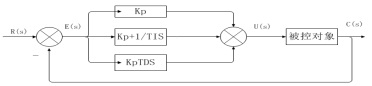
图3-1 模拟PID控制系统原理框图 PID调节器是一种线性调节器,它根据给定值  与实际输出值  构成的控制偏差: 模拟PID调节器的控制规律为  (3-2) 式中,  为比例系数,  为积分时间常数,  为微分时间常数。 由式(3-2)可得,模拟PID调节器的传递函数为   (3-3) 3.1.2 数字PID 由于计算机只能识别数字量,不能对连续的控制算式直接进行运算,故在计算机控制系统中,首先必须对控制规律进行离散化的算法设计。 在连续时间域中,PID控制器控制系统框图也直接可表述为 图3-2 PID控制器控制系统框图 PID控制传递函数为:  (3-4) 时域拉氏发变换为:  (3-5) 其中:e(t)为控制器的输入即控制系统的给定量与输出量的偏差;u(t)为控制器的输出;  为比例系数;  为积分时间常数;  为微分时间常数。 控制输出函数关系为:  (3-6) 协调参数 :当 增大时,可以加快系统的动态响应速度,减小系统稳态误差,但不能完全消除稳态误差  ,并且 过大,会引起系统振荡,超调量增加,有可能造成系统不稳定。 (2)比例-积分控制器PI 控制输出函数关系为:  (3-7) 加入积分环节,目的是消除系统稳态误差,因为随着不断累加偏差,最终会消除稳态误差,但是会影响系统的稳定性。积分时间常数 越大,积分作用越弱,反之则越强。因此,减小 ,可以消除稳态误差 ,但是 过小,可能会造成系统不稳定,并且系统动态响应速度过慢。 (3)比例-积分-微分控制器PID 控制输出函数关系为:  (3-8) 加入微分环节,用来改善系统动态响应速度过慢。在响应过程中,提前抑制偏差向任何方向的变化,对偏差变化进行提前预报,降低系统超调,增加系统稳定性  。协调参数 ,当 过大过小,也会影响系统的动态响应速度及稳定性。 四系统软件设计 4.1 MATLAB设计思想 本论文运用它的图像仿真功能判断给出系统闭环传递函数的稳定性,然后使用Simulink仿真模块对前面给定函数形式判断测试出合适的P、I、D参数。 PID控制已经形成了典型结构,参数易于调整,结构简单,且结果改变灵活(如PI、PD等),所以它被广泛应用于许多工业生产过程控制,获得了良好的效果。 图4-1 系统PID控制框图
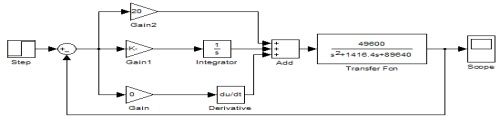
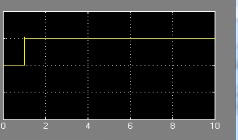
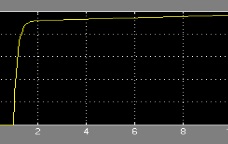
4.2 设计步骤及结果Matlab程序设计仿真如下: 图4-1 直流电机输出电压与转速函数关系Bode图和Nyquist曲线图 标记出奈圭斯特曲线与负实轴的交点及用bode图绘出的相频特性曲线与  线相交点坐标。 分析:1)由第一个图知道,开环传递函数有两个极点,即有两条根轨迹(绿色部分),没有零点。 2)由图二知道,零极点图中只绘出了一个极点P1=-66.4,而省略了另一个极点P2=-1350。 3)由开环传递函数表达式知,开环传递函数在,s右半平面极点个数P=0,(s=jw),w:0到正无穷变化时,奈圭斯特曲线绕点(-1,j0)逆时针旋转圈数为N=0,根据奈圭斯特稳定判据得,Z=P-2N=0,所以闭环系统是稳定的,其中Z表示闭环传递函数在s平面右半平面极点个数。 4)根据对数频率稳定判据(又称Bode判据),闭环系统稳定的充分必要条件是  。通过观察也可知,相频特性曲线过 线次数为0,即 N=0,系统是稳定的。并且由P=0,也可计算N=0。 (2)纯PID控制仿真 对电机同步控制系统采用PID,根据式(2-3)的传递函数,通过多次试验,得到较适宜的PID参数:  ,设计了系统PID仿真结构图及simulink仿真模块,并得出仿真结果,分别如下图4-2、4-3所示: 图4-2 系统PID控制下仿真模块设计 (a)PID控制下全局图 (b)PID控制下局部图 图4-3 PID控制下直流电机同步仿真响应曲线 五 基于FPGA的直流电机闭环控制数字硬件系统设计 5.1 系统的工作原理 (1)总体硬件结构

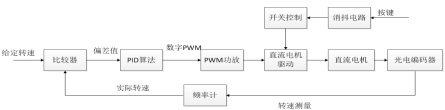
图5-1 基于FPGA的直流电机闭环控制系统的总体硬件结构 (2)基于FPGA的直流电机闭环控制系统的系统工作流程框图如图6-2 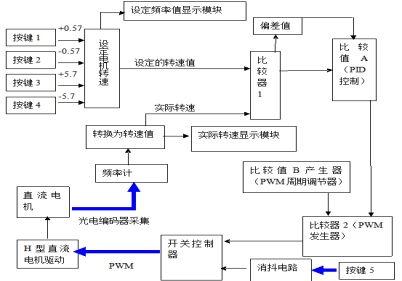
图5-2 直流电机闭环控制系统的系统工作流程框图 工作流程为:检测到电机工作脉冲,将其转换为实际转速b,实际转速b与通过键盘设定好的设定转速a比较并且分析,得出偏差值Q,内部的PID调节器对偏差Q和a,b进行分析,输出调节比较器2(PWM波形发生器)的比较值的信号。比较器2输出的PWM波形接到电机开关控制器,电机控制器的输出由输入按键5控制。开关控制器开时输出PWM波形到H型驱动电路驱动电机工作。 六 总结 在调速系统领域,作为一类新型的电机,直流电机在其结构特点和运行方式上具有比其他类型的传统电机更为优秀的运行性能和更广泛的适用范围,因而应用前景广阔。针对直流电机控制的研究越来越深入,控制器也不断改进和翻新,控制性能不断提高。本论文基于FPGA对直流电机进行PID自动控制,整个控制系统看似复杂,但是将其中几个模块拆开来独立进行研究就显得简单容易多了。整个系统体积小、可靠性高、灵活性强,实现了数字式控制。 本文研究表明,基于FPGA的永磁直流减速电机速度控制系统,采用数字硬件方式实现控制算法,整个系统速度快,可靠性高、具有可扩展性,大大缩短了硬件开发的周期。
完整的Word格式文档51黑下载地址:
 文档.doc
(407.4 KB, 下载次数: 61)
文档.doc
(407.4 KB, 下载次数: 61)
| 











 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

