
1. 用 途
广泛应用于检测与控制系统中,将机械位移变换成电脉冲频率信号输出。
除可检测单、双向和动、静态位移外,附加适当机构还可用于测量拉力、压力、液位、体积、重量、流量等。该系列传感器已在国内各行业广泛应用,1998年曾被北京传感器协会评为“拳头”产品。
2. 结构及工作原理
主要由螺管线圈、导杆(衔铁)、电容、集成块和外壳、后盖、插头座、电缆和密封件等组成,内部用导线连成L-C振荡电路。当导杆受被测物位移而改变其与线圈的相对位置时,磁路的磁阻与线圈电感发生变化,从而改变了电路输出信号的频率。适当选择导杆材料与线圈结构形式,则导杆—线圈中的位移量恰好与输出信号频率变化呈良好的线性关系。
3. 特点
◇ 原理新颖,输出频率信号,抗干扰;
◇ 与微机配套,无需A/D转换;
◇ 量程宽,灵敏度高,重复性好,滞后小;
◇ 结构简单,坚固可*,封装严密,抗振防潮,并有防水、防腐和防爆型产品;
◇ 耗电小,对电源电压和电缆质量要求不高,特别适合遥测遥控和恶劣环境下使用。
4. 性能指标
◇ 量 程:80mm;
◇ 中心频率f0:15,(25)KHZ±5%;
◇ 满量程相对频偏f/ f0:6~50%;
◇ 精度:1Hz/mm;
◇ 供电要求:电压直流5V、12V(±10%~15%)电流1~10mA;
◇ 输出信号V0(P-P)≥3V,波形:方波,正弦波(近似);
◇ 允许电缆长度:DC12V 0~1000米 DC5V 0~100米;
◇ 零点漂移:通电30分钟后4小时或温度变化10℃不大于0.7倍的基
本误差;
◇ 耐冲击加速度≮100g;
◇ 工作温度:-20~+50℃(-30~+80℃);
◇ 动态频响:取决于二次仪表;
5. 使用方法及定货须知
5.1 二次仪表:可用5位以上数字频率计,单片机开发的智能测控仪表
等。
5.2 接线
棕色(1号):电源正极
蓝色(2号):信号线
黑色(3和4):电源负极
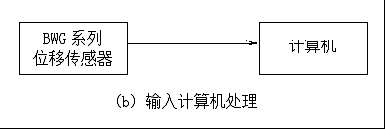
测试方框图如下:
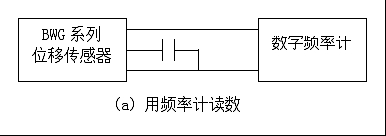
5.3 读数与数据处理:
传感器测试静态位移时,可用频率计读数,由以下公式换算:
ΔS=KΔf
其中:K-为传感器分辨率,单位mm/Hz,在出厂证明书中给出,ΔS和Δf 为位移及其对应输出的频偏。
当然,如果用计算机处理数据,则可以直接打印,而不须换算。
本传感器为线性传感器,其灵敏度系数K=Δf/ΔP(常数)。因此,如果因使用条件变化而使零点的中心频率发生变化则在额定量程内,其K值不变。
6. 位移传感器调试
6.1 传感器实物图

6.2 传感器输出波形
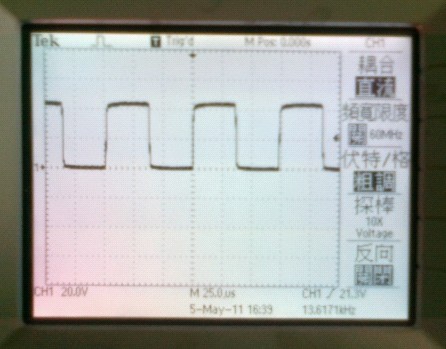
看到此输出波形就应该知道怎样读取传感器的值,本文采用AVR单片机的定时和计数功能,运用这两个模块很容易就读出传感器的值,定时计数程序如下:
#include<mega16.h>
#include<delay.h>
#include<Lcd_AVR16_240128.h> //液晶头文件
unsigned int Counter=0;
void main()
{
unsigned char Text[]={"定时脉冲数"};
//============液晶初始化========
LCD_INIT();
Clear_Screen();
//==============================
//TCCR0=0x07; // T/C0 时钟由 T0 引脚输入,上升沿触发
//TCNT0=0; //计数器0初始值0 T/C0外部计数器输入
//TCCR1A=0x00;
TCCR1B=0x07; //外部T1引脚计数方式,下降沿驱动
TCNT1=0; //计数器1初始值0 T/C1外部计数器输入
ASSR=0x00; //T/C2选择系统内部时钟源 8M
TCCR2=0x07; // T/C2工作于定时方式,1024分频 ,
TCNT2=0;
TIMSK|=0x40; //TC2溢出中断使能
#asm("sei"); //开总中断
//Show_Text(0,0,Text2);
while(1)
{
Show_Text(0,0,Text);
Show_Int(0,1,Counter-223);//位移为0mm时的脉冲数
delay_ms(8);
}
}
interrupt[5]void TC2(void)
{
Counter = TCNT1;
TCNT1=0;
}
6.3 频率—脉冲—位移关系
|
位移(mm) |
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
79 |
|
频率(kHZ) |
13.61 |
14.33 |
15.10 |
15.86 |
16.62 |
17.40 |
18.16 |
18.69 |
18.72 |
|
定时脉冲数 |
0 |
12 |
24 |
37 |
49 |
62 |
74 |
83 |
93 |
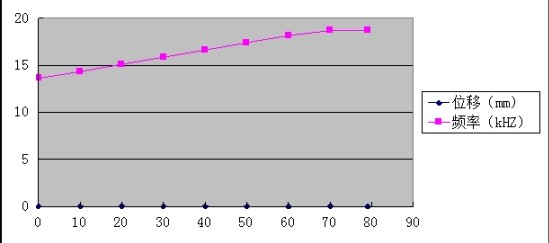
位移与频率关系
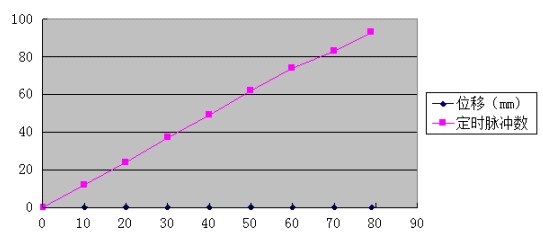
位移与定时脉冲数的关系
从实际测出的数据来看,位移传感器的线性度非常好。