
1、定时显示
开辟一显示缓冲区,显示中断程序定时读取缓冲区显示各灯位,每灯位显示2.5ms,显示4只灯需要10ms,也就是显示的刷新频率是100Hz,亮度为25%。这样既保证亮度又不闪烁,同时CPU还有足够时间做其他事情。
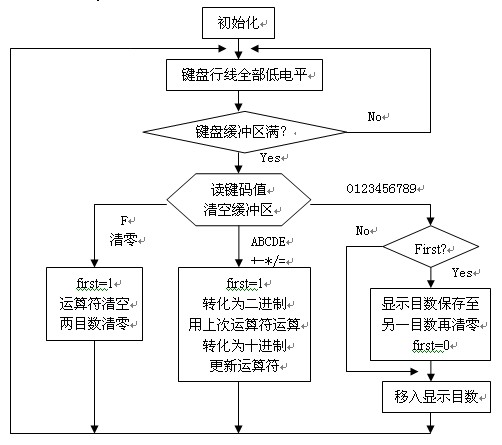
2、键盘中断扫描
利用键盘中断扫描程序,读出按键的键码,存入键盘缓冲区,供主程序读区。
3、计算器的主程序读取键盘缓冲区的键码,驱动计算器的运行,计算器的运行过程要清晰明了;
4、计算中需要十进制与十六进制(或二进制)转化。
#define LED_seg XBYTE[0x6000] //段码地址
#define LED_light XBYTE[0x8000] //灯位地址
#include "reg51.h"
#include "absacc.h"
unsigned char read_key(unsigned char);
unsigned char display(unsigned char,unsigned char);
void delay(unsigned int);
unsigned char light[4]={0xfe,0xfd,0xfb,0xf7}; //扫描值 灯位码
unsigned char seg[16]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71}; //段码
unsigned char disp_buffer[5]={1,0,0,0,0}; //当前灯位、 显示区
unsigned char key_buffer[2]={0,0xff}; //缓冲区满标志、键码
void main()
{
Unsigned char temp[5];
unsigned char i;
unsigned char operator=0;
unsigned int tempa,tempb;
bit first=1;
TMOD=0x01; //置T0为方式1
TL0=0x0; //延时2.5mS的定时器初始值
TH0=0xf7; //赋初值
PT0=1; //定时中断0优先设置
TR0=1; //启动定时
ET0=1; //允许定时
IT1=0; //电平触发低电平有效
EX1=1; //允许外中断
PX1=1; // 外部中断1优先级设定
EA=1; //中断总允许
while(1)
{
P1=0xf0; //扫描
if (key_buffer[0])
{
switch(key_buffer[1]) //缓冲区满
{
case 0:
case 1:
case 2:
case 3:
case 4:
case 5:
case 6:
case 7:
case 8:
case 9: if (first) for(i=1;i<=4;i++) //保存数据,等待另一个数据输入
{
temp[i]=disp_buffer[i];
disp_buffer[i]=0;
}
first=0;
for(i=1;i<=3;i++) disp_buffer[i]=disp_buffer[i+1];
disp_buffer[4]=key_buffer[1];
break;
case 10:
case 11:
case 12:
case 13:
case 14: first=1;
tempa=1000*disp_buffer[1]+100*disp_buffer[2]+10*disp_buffer[3]+disp_buffer[4];
tempb=1000*temp[1]+100*temp[2]+10*temp[3]+temp[4];
switch(operator)
{
case 10:tempa+=tempb;
break;
case 11:tempa=tempb-tempa;
break;
case 12:tempa*=tempb;
break;
case 13:tempa=tempb/tempa;
}
tempa%=10000;
disp_buffer[1]=tempa/1000;
tempa%=1000;
disp_buffer[2]=tempa/100;
tempa%=100;
disp_buffer[3]=tempa/10;
disp_buffer[4]=tempa%10;
operator=key_buffer[1];
break;
case 15: for(i=1;i<=4;i++) disp_buffer[i]=temp[i]=0;
first=1;
operator=0;
}
key_buffer[0]=0; //缓冲区空
}
}
}
void disp_LED() interrupt 1
{
TL0=0x0; //延时2.5mS的定时器初始值
TH0=0xf7;
if (disp_buffer[0]==5) disp_buffer[0]=1;
display(disp_buffer[disp_buffer[0]],disp_buffer[0]);
disp_buffer[0]++;
}
void get_keypad_code() interrupt 2
{
unsigned char i,key;
EA=0;
for (i=0;i<=3;i++)
{
key=read_key(light[i]); //读键码
if (key!=0xff) delay(10); //延时5-10ms,去抖动
if (read_key(light[i])!=key) key=0xff; //读键码比较
if (key!=0xff)
{
key_buffer[0]=1; //缓冲区满
key_buffer[1]=key; //键码
}
}
EA=1;
}
unsigned char read_key(unsigned char scan)
{
P1=scan; //扫描
switch(P1) //返回扫描码->键码
{
case 0x77:return(0x7);
case 0xb7:return(0x8);
case 0xd7:return(0x9);
case 0xe7:return(0xd);
case 0x7b:return(0x4);
case 0xbb:return(0x5);
case 0xdb:return(0x6);
case 0xeb:return(0xc);
case 0x7d:return(0x1);
case 0xbd:return(0x2);
case 0xdd:return(0x3);
case 0xed:return(0xb);
case 0x7e:return(0xf);
case 0xbe:return(0x0);
case 0xde:return(0xe);
case 0xee:return(0xa);
default: return(0xff);
}
}
unsigned char display(unsigned char disp_key,unsigned char n) //disp_key 显示字符,n 灯位
{
if ((n<=4)&&(n>=1)) LED_light=light[n-1];
else LED_light=0xff;
if ((disp_key>=0)&&(disp_key<=16)) LED_seg=seg[disp_key];
else LED_seg=0x00;
return light[n-1];
}
void delay(unsigned int k) //延时k*1ms
{
unsigned int i,j;
for (j=0;j<=k;j++)
for(i=0;i<=1085;i++);
}