
51单片机串口输出
//***************************************
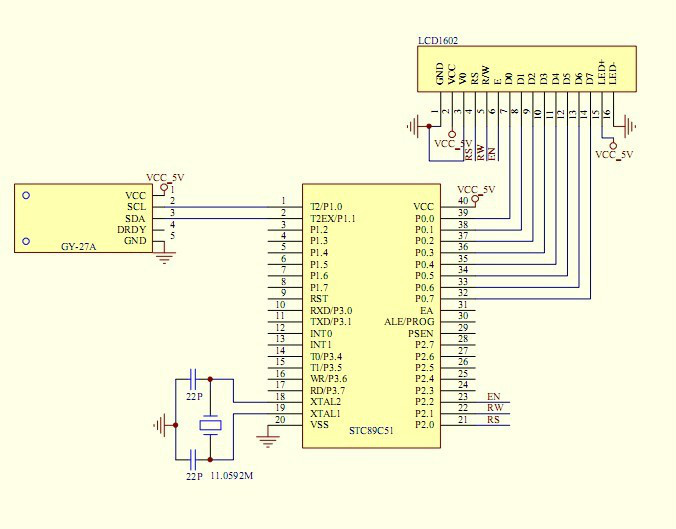
// HMC5883 51串口测试程序
// 使用单片机STC89C51
// 晶振:11.0592M
// 显示:PC串口
// 编译环境 Keil uVision2
// 参考宏晶网站24c04通信程序
// 时间:2011年3月1日
//****************************************
#include <REG51.H>
#include <math.h> //Keil library
#include <stdio.h> //Keil library
#include <INTRINS.H>
#define uchar unsigned char
#define uint unsigned int
//使用的端口,请按照以下接线
#define DataPort P0 //LCD1602数据端口
sbit SCL=P1^0; //IIC时钟引脚定义
sbit SDA=P1^1; //IIC数据引脚定义
#define SlaveAddress 0x3C //定义器件5883在IIC总线中的从地址
typedef unsigned char BYTE;
typedef unsigned short WORD;
BYTE BUF[8]; //接收数据缓存区
uchar ge,shi,bai,qian,wan; //显示变量
int dis_data; //变量
//************
//************
void delay(unsigned int k);
void Init_HMC5883(void); //初始化5883
void conversion(uint temp_data);
void Single_Write_HMC5883(uchar REG_Address,uchar REG_data); //单个写入数据
//uchar Single_Read_HMC5883(uchar REG_Address); //单个读取内部寄存器数据
void Multiple_Read_HMC5883(); //连续的读取内部寄存器数据
//以下是模拟iic使用函数-------------
void Delay5us();
void Delay5ms();
void HMC5883_Start();
void HMC5883_Stop();
void HMC5883_SendACK(bit ack);
bit HMC5883_RecvACK();
void HMC5883_SendByte(BYTE dat);
BYTE HMC5883_RecvByte();
void HMC5883_ReadPage();
void HMC5883_WritePage();
//-----------------------------------
//*********************************************
//串口初始化
//9600 bps @ 11.059 MHz
void init_uart()
{
TMOD=0x21;
TH1=0xfd;
TL1=0xfd;
SCON=0x50;
PS=1; //串口中断设为高优先级别
TR0=1; //启动定时器
TR1=1;
ET0=1; //打开定时器0中断
ES=1;
}
//*********串口数据发送******************
void SeriPushSend(uchar send_data)
{
SBUF=send_data;
while(!TI);TI=0;
}
//*********************************************************
void conversion(uint temp_data)
{
wan=temp_data/10000+0x30 ;
temp_data=temp_data%10000; //取余运算
qian=temp_data/1000+0x30 ;
temp_data=temp_data%1000; //取余运算
bai=temp_data/100+0x30 ;
temp_data=temp_data%100; //取余运算
shi=temp_data/10+0x30 ;
temp_data=temp_data%10; //取余运算
ge=temp_data+0x30;
}
/*******************************/
void delay(unsigned int k)
{
unsigned int i,j;
for(i=0;i<k;i++)
{
for(j=0;j<121;j++)
{;}}
}
/**************************************
延时5微秒(STC90C52RC@12M)
不同的工作环境,需要调整此函数,注意时钟过快时需要修改
当改用1T的MCU时,请调整此延时函数
**************************************/
void Delay5us()
{
_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();
_nop_();_nop_();_nop_();_nop_();
}
/**************************************
延时5毫秒(STC90C52RC@12M)
不同的工作环境,需要调整此函数
当改用1T的MCU时,请调整此延时函数
**************************************/
void Delay5ms()
{
WORD n = 560;
while (n--);
}
/**************************************
起始信号
**************************************/
void HMC5883_Start()
{
SDA = 1; //拉高数据线
SCL = 1; //拉高时钟线
Delay5us(); //延时
SDA = 0; //产生下降沿
Delay5us(); //延时
SCL = 0; //拉低时钟线
}
/**************************************
停止信号
**************************************/
void HMC5883_Stop()
{
SDA = 0; //拉低数据线
SCL = 1; //拉高时钟线
Delay5us(); //延时
SDA = 1; //产生上升沿
Delay5us(); //延时
}
/**************************************
发送应答信号
入口参数:ack (0:ACK 1:NAK)
**************************************/
void HMC5883_SendACK(bit ack)
{
SDA = ack; //写应答信号
SCL = 1; //拉高时钟线
Delay5us(); //延时
SCL = 0; //拉低时钟线
Delay5us(); //延时
}
/**************************************
接收应答信号
**************************************/
bit HMC5883_RecvACK()
{
SCL = 1; //拉高时钟线
Delay5us(); //延时
CY = SDA; //读应答信号
SCL = 0; //拉低时钟线
Delay5us(); //延时
return CY;
}
/**************************************
向IIC总线发送一个字节数据
**************************************/
void HMC5883_SendByte(BYTE dat)
{
BYTE i;
for (i=0; i<8; i++) //8位计数器
{
dat <<= 1; //移出数据的最高位
SDA = CY; //送数据口
SCL = 1; //拉高时钟线
Delay5us(); //延时
SCL = 0; //拉低时钟线
Delay5us(); //延时
}
HMC5883_RecvACK();
}
/**************************************
从IIC总线接收一个字节数据
**************************************/
BYTE HMC5883_RecvByte()
{
BYTE i;
BYTE dat = 0;
SDA = 1; //使能内部上拉,准备读取数据,
for (i=0; i<8; i++) //8位计数器
{
dat <<= 1;
SCL = 1; //拉高时钟线
Delay5us(); //延时
dat |= SDA; //读数据
SCL = 0; //拉低时钟线
Delay5us(); //延时
}
return dat;
}
//***************************************************
void Single_Write_HMC5883(uchar REG_Address,uchar REG_data)
{
HMC5883_Start(); //起始信号
HMC5883_SendByte(SlaveAddress); //发送设备地址+写信号
HMC5883_SendByte(REG_Address); //内部寄存器地址,请参考中文pdf
HMC5883_SendByte(REG_data); //内部寄存器数据,请参考中文pdf
HMC5883_Stop(); //发送停止信号
}
/*
//********单字节读取内部寄存器*************************
uchar Single_Read_HMC5883(uchar REG_Address)
{ uchar REG_data;
HMC5883_Start(); //起始信号
HMC5883_SendByte(SlaveAddress); //发送设备地址+写信号
HMC5883_SendByte(REG_Address); //发送存储单元地址,从0开始
HMC5883_Start(); //起始信号
HMC5883_SendByte(SlaveAddress+1); //发送设备地址+读信号
REG_data=HMC5883_RecvByte(); //读出寄存器数据
HMC5883_SendACK(1);
HMC5883_Stop(); //停止信号
return REG_data;
}
*/
//******************************************************
//
//连续读出HMC5883内部角度数据,地址范围0x3~0x5
//
//******************************************************
void Multiple_read_HMC5883(void)
{ uchar i;
HMC5883_Start(); //起始信号
HMC5883_SendByte(SlaveAddress); //发送设备地址+写信号
HMC5883_SendByte(0x03); //发送存储单元地址,从0x3开始
HMC5883_Start(); //起始信号
HMC5883_SendByte(SlaveAddress+1); //发送设备地址+读信号
for (i=0; i<7; i++) //连续读取6个地址数据,存储中BUF
{
BUF[i] = HMC5883_RecvByte(); //BUF[0]存储0x32地址中的数据
if (i == 6)
{
HMC5883_SendACK(1); //最后一个数据需要回NOACK
}
else
{
HMC5883_SendACK(0); //回应ACK
}
}
HMC5883_Stop(); //停止信号
Delay5ms();
}
//初始化HMC5883,根据需要请参考pdf进行修改****
void Init_HMC5883()
{
Single_Write_HMC5883(0x02,0x00); //
Single_Write_HMC5883(0x01,0xE0); //
}
//*********************************************************
//主程序********
//*********************************************************
void main()
{ // bit sign_bit;
unsigned int i;
int x,y,z;
double angle;
delay(100);
init_uart();
Init_HMC5883();
while(1) //循环
{
Multiple_Read_HMC5883(); //连续读出数据,存储在BUF中
x = BUF[0] << 8 | BUF[1];
y = BUF[4] << 8 | BUF[5];
z = BUF[2] << 8 | BUF[3];
angle= atan2((double)y,(double)x) * (180 / 3.14159265) + 180; // angle in degrees
conversion(angle); //计算数据和显示
SeriPushSend(bai);
SeriPushSend(shi);
SeriPushSend(ge);
SeriPushSend(0x0d);
SeriPushSend(0x0a);
for (i=0;i<10000;i++); //延时
}
}