
今天构思了机械手的关节部位和坐标计算方法,可能最终会最多用到四轴联动,如果用不同转速来控制四周轴的话,单线程可能会很吃力。所以如果用到的话,尽量用等速来控制,这是后话。
下面是关节的草图,设计的初中是尽量大范围的并从指定角度抓取物体,并用制定轨迹移动物体。
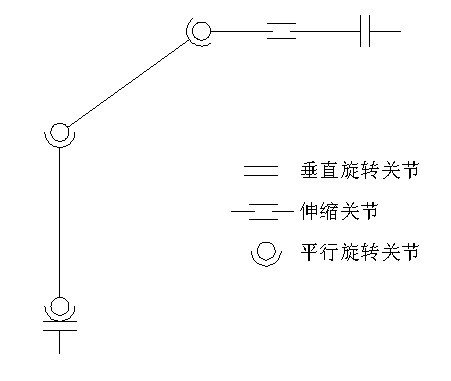
各臂的长短没有按照最终比例绘出,最终可能会舍去某些关节。
下面是终端坐标算法
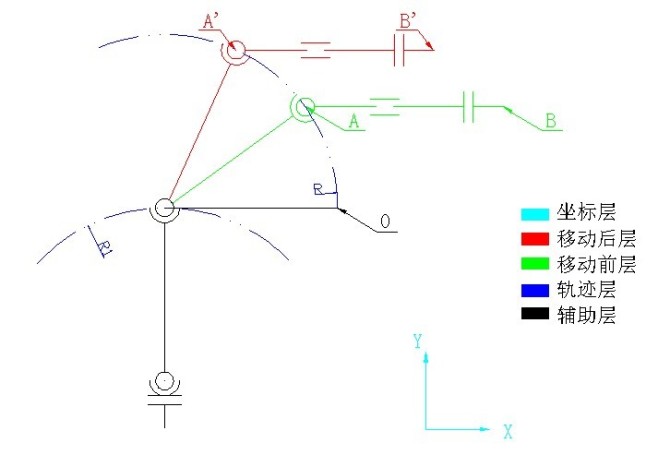
上图所示,B点到B‘点X,Y的相对坐标等于A点到A‘点的相对坐标,而A和A’其实就是R圆轨迹上的两点,为了坐标的计算,必须取一点作为参考点O,O点坐标为R圆零度坐标(R,0),设A点距O点旋转了a°,根据圆的角度公示为Ax=rcosa,Ay=rsina。A’点的坐标为A'x=rcosa',A'y=rsina'。得出A和A‘的相对位置为(Ax-A'x,Ay-A'y)。同理如果在R1上也有转动的话也可以用这个方法算出,最后将坐标相加就可得出B点移动了多少,如果需要在移动的过程中B点X坐标保持不变,只要控制伸缩臂进行插补即可。同样水平方向的Z坐标也可如此计算。
下面一步要在实际中模拟出这一动作,也就是程序的编写和各轴数据的存储,以及参考点的设定与返回方法。
C51完成这些计算可能有些能力不足,考虑上位机交互的方法,单片机只处理各电机最终要走的步数即可,其他有电脑完成。