|
ЖдгкММЪѕЕФбЇЯАЃЌЮвЯЃЭћДѓМввЛЖЈвЊгазуЙЛЕФФЭадКЭШЭадЁЃШчЙћФуОіЖЈДгЪТЕЅЦЌЛњетУХММЪѕЃЌФЧОЭвЛЖЈвЊМсГжбЇЯАЯТШЅЃЌВЛФмАыЭОЖјЗЯЃЌЕБФуМсГжбЇЯАвЛЖЮЪБМфКѓФуЛсЗЂЯжздМКТ§Т§ЛсЯВЛЖетаЉЭцвтЃЌЖдетаЉЖЋЮїгаСЫХЈКёЕФаЫШЄКЭИаЧщЃЌФЧФуРыГЩЙІОЭВЛдЖСЫЁЃбЇЕНЕкОХПЮСЫЃЌЙФРјЙФРјздМКЃЌдйМгАбОЂХЖЃЁ
1.1 ЕЅЦЌЛњЕФIOПкНсЙЙ
ЩЯНкПЮЮвУЧЬсЕНСЫЕЅЦЌЛњЕФIOПкЕФЦфжавЛжж“зМЫЋЯђIO”ЕФФкВПНсЙЙЃЌЪЕМЪЩЯЮвУЧЕФЕЅЦЌЛњIOПкЛЙгаСэЭтШ§жжзДЬЌЃЌЗжБ№ЪЧПЊТЉЁЂЭЦЭьЁЂИпзшЬЌЃЌЮвУЧЭЈЙ§ЭМ9-1РДПДЯТШ§жжзДЬЌЁЃ
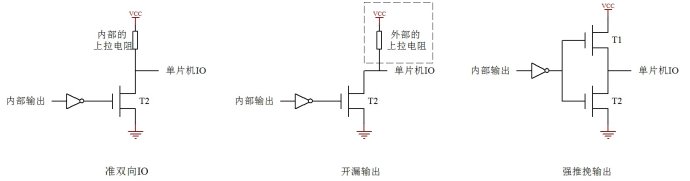
ЭМ9-1 ЕЅЦЌЛњIOПкзДЬЌЪОвтЭМ
ЧАБпЮвУЧМђЕЅНщЩм“зМЫЋЯђIO”ЕФЪБКђЃЌЮвУЧЪЧгУШ§МЋЙмРДЫЕУїЕФЃЌГігкбЯНїЕФЬЌЖШЃЌЮвУЧетРяАДееЪЕМЪЧщПігУMOSЙмЛЭМЪОвтЁЃЪЕМЪЩЯШ§МЋЙмЪЧППЕчСїЕМЭЈЕФЃЌЖјMOSЙмЪЧППЕчбЙЕМЭЈЕФЃЌОпЬхдЕгЩКЭЫћУЧЕФФкВПЙЙдьгаЙиЯЕЃЌдкетРяЮвУЧднЧвВЛБиЙиаФЃЌШчЙћНёКѓгаБивЊСЫНтПЩвджБНгВщевФЃФтЕчзгЪщЛђепАйЖШЯрЙизЪСЯНјааЯИжТбЇЯАЁЃдкЕЅЦЌЛњIOПкзДЬЌетвЛПщФкШнЩЯЃЌЮвУЧПЩвдАбMOSЙмЕБШ§МЋЙмРДРэНтЁЃдкЮвУЧЕФЭМ9-1жаЃЌT1ЯрЕБгквЛИіPNPШ§МЋЙмЃЌT2ЯрЕБгквЛИіNPNШ§МЋЙмЁЃ
ЦфжазМЫЋЯђIOПкдРэвбОНВЙ§СЫЃЌПЊТЉЪфГіКЭзМЫЋЯђIOЕФЮЈвЛЧјБ№ЃЌОЭЪЧПЊТЉЪфГіАбФкВПЕФЩЯРЕчзшШЅЕєСЫЁЃПЊТЉЪфГіШчЙћвЊЪфГіИпЕчЦНЪБЃЌT2ЙиЖЯЃЌIOЕчЦНвЊППЭтВПЕФЩЯРЕчзшВХФмРГЩИпЕчЦНЃЌШчЙћУЛгаЭтВПЩЯРЕчзшIOЕчЦНОЭЪЧвЛИіВЛШЗЖЈЬЌЁЃБъзМ51ЕЅЦЌЛњЕФP0ПкФЌШЯОЭЪЧПЊТЉЪфГіЃЌШчЙћвЊгУЕФЪБКђЭтВПашвЊМгЩЯРЕчзшЁЃЖјЧПЭЦЭьЪфГіОЭгаБШНЯЧПЕФЧ§ЖЏФмСІЃЌШчЭМ9-1жаЕкШ§еХаЁЭМЃЌЕБФкВПЪфГівЛИіИпЕчЦНЪБЃЌЭЈЙ§MOSЙмжБНгЪфГіЕчСїЃЌУЛгаЕчзшЕФЯоСїЃЌЕчСїЪфГіФмСІвВБШНЯДѓЃЛШчЙћФкВПЪфГівЛИіЕЭЕчЦНЃЌФЧЗДЯђЕчСївВПЩвдКмДѓЃЌЧПЭЦЭьЕФвЛИіЬиЕуОЭЪЧЧ§ЖЏФмСІЧПЁЃ
ЕЅЦЌЛњIOЛЙгавЛжжзДЬЌНаИпзшЬЌЁЃЭЈГЃЮвУЧгУРДзіЪфШыв§НХЕФЪБКђЃЌПЩвдНЋIOПкЩшжУГЩИпзшЬЌЃЌИпзшЬЌв§НХБОЩэШчЙћаќПеЃЌгУЭђгУБэВтСПЕФЪБКђПЩФмЪЧИпПЩФмЪЧЕЭЃЌЫћЕФзДЬЌЭъШЋШЁОігкЭтВПЪфШыв§НХЕФЕчЦНЃЌИпзшЬЌв§НХЖдGNDЕФЕчзшКмДѓЯрЕБгквЛИіЮоЧюДѓЃЌЫљвдГЦжЎЮЊИпзшЁЃ
етОЭЪЧЕЅЦЌЛњЕФIOПкЕФЫФжжзДЬЌЃЌдкЮвУЧ51ЕЅЦЌЛњбЇЯАЙ§ГЬжаЃЌЮвУЧЕФжївЊгІгУЪЧзМЫЋЯђIOПкЃЌЫцзХЮвУЧбЇЯАЕФЩюШыЃЌЦфЫћзДЬЌвВЛсгаНгДЅЃЌдкетРяНщЩмИјДѓМвбЇЯАвЛЯТЁЃ
1.2 ЩЯЯТРЕчзш
ЧАБпЫЦКѕЮвУЧКмЖрДЮЬсЕНСЫЩЯРЕчзшЃЌЯТРЕчзшЃЌОпЬхЕНЕзЪВУДбљЕФЕчзшЫуЪЧЩЯЯТРЕчзшЃЌЩЯЯТРЕчзшЖМгаКЮзїгУФиЃП
ЩЯРЕчзшОЭЪЧНЋВЛШЗЖЈЕФаХКХЭЈЙ§вЛИіЕчзшРЕНИпЕчЦНЃЌЭЌЪБДЫЕчзшвВЦ№ЕНвЛИіЯоСїзїгУЃЌЯТРОЭЪЧЯТРЕНЕЭЕчЦНЁЃ
БШШчЮвУЧЕФIOЩшжУЮЊПЊТЉЪфГіИпЕчЦНЛђепЪЧИпзшЬЌЪБЃЌФЌШЯЕФЕчЮЛЪЧВЛШЗЖЈЕФЃЌЭтВПОвЛИіЕчзшНгЕНVCCЃЌвВОЭЪЧЩЯРЕчзшЃЌФЧУДЯргІЕФв§НХОЭЪЧИпЕчЦНЃЛОвЛИіЕчзшЕНGNDЃЌвВОЭЪЧЯТРЕчзшЃЌФЧУДЯргІЕФв§НХОЭЪЧвЛИіЕЭЕчЦНЁЃ
ЩЯРЕчзшгІгУКмЖрЃЌЖМПЩвдЦ№ЕНЪВУДзїгУФиЃПЮвУЧЯждкжївЊЯШСЫНтзюГЃгУЕФвдЯТ4ЕуЁЃ
1ЁЂOCУХвЊЪфГіИпЕчЦНЃЌБиаыЭтВПМгЩЯРЕчзшВХФме§ГЃЪЙгУЃЌЦфЪЕOCУХОЭЯрЕБгкЕЅЦЌЛњIOЕФПЊТЉЪфГіЃЌЦфдРэПЩВЮееЭМ9-1жаЕФПЊТЉЕчТЗЁЃ
2ЁЂМгДѓЦеЭЈIOПкЕФЧ§ЖЏФмСІЁЃБъзМ51ЕЅЦЌЛњЕФФкВПIOПкЕФЩЯРЕчзшЃЌвЛАуЖМЪЧдкМИЪЎKХЗЃЌБШШчSTC89C52RCФкВПЪЧ20KЕФЩЯРЕчзшЃЌЫљвдзюДѓЪфГіЕчСїЪЧ250uAЃЌвђДЫЭтВПМгИіЩЯРЕчзшЃЌПЩвдаЮГЩКЭФкВПЩЯРЕчзшЕФВЂСЊНсЙЙЃЌдіДѓИпЕчЦНЪБЕчСїЕФЪфГіФмСІЁЃ
3ЁЂдкЕчЦНзЊЛЛЕчТЗжаЃЌБШШчЮвУЧЧАБпНВЕФ5VзЊ12VЕФЕчТЗжаЃЌЩЯРЕчзшЦфЪЕЦ№ЕНЕФЪЧЯоСїЕчзшЕФзїгУЃЌШчЭМ9-2ЫљЪОЁЃ
")
ЭМ9-2 ЩЯРЕчзшR2
4ЁЂБШШчЕЅЦЌЛњзмЯпв§НХЃЌВЛЪЙгУЕФв§НХаќПеЕФЪБКђЃЌШнвзЪмЕНЕчДХИЩШХЖјДІгквЛИіЮЩТвзДЬЌЃЌМгЩЯвЛИіЖдVCCЕФЩЯРЕчзшЛђепвЛИіЖдGNDЕФЯТРЕчзшКѓЃЌПЩвдгааЇЕФЕжПЙЕчДХИЩШХЁЃ
ЮвУЧдкНјааЕчТЗЩшМЦЕФЪБКђЃЌШчКЮе§ШЗбЁдёКЯЪЪЕФЩЯЯТРЕчзшЕФзшжЕФиЃП
1ЁЂДгНкдМЙІКФЕФЗНУцПМТЧгІЕБзуЙЛДѓЃЌвђЮЊЕчзшдНДѓЃЌЕчСїдНаЁЁЃ
2ЁЂДгШЗБЃзуЙЛЕФв§НХЧ§ЖЏЕчСїПМТЧгІЕБзуЙЛаЁЃЌЕчзшаЁСЫЃЌЕчСїВХФмДѓЁЃ
3ЁЂдкПЊТЉЪфГіЪБЃЌЙ§ДѓЕФЩЯРЕчзшЛсЕМжТаХКХЩЯЩ§биБфЛКЁЃЮвУЧРДНтЪЭвЛЯТЃКЪЕМЪЕчЦНЕФБфЛЏЖМЪЧашвЊЪБМфЕФЃЌЫфШЛКмаЁЃЌЕЋгРдЖЖМДяВЛЕНСуЃЌЖјПЊТЉЪфГіЪБЩЯРЕчзшЕФДѓаЁОЭжБНггАЯьСЫетИіЩЯЩ§Й§ГЬЫљашвЊЕФЪБМфЃЌШчЭМ9-3ЫљЪОЁЃЯывЛЯТЃЌШчЙћЕчзшКмДѓЃЌЖјаХКХЦЕТЪгжКмПьЕФЛАЃЌзюжеНЋЕМжТаХКХЛЙУЛЕШЩЯЩ§ЕНИпЕчЦНОЭгжБфЮЊЕЭСЫЃЌгкЪЧаХКХОЭЮоЗЈе§ШЗДЋЫЭСЫЁЃ
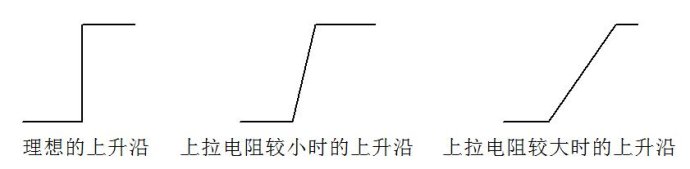 ЭМ9-3 ЩЯРЕчзшЖдВЈаЮЕФгАЯь ЭМ9-3 ЩЯРЕчзшЖдВЈаЮЕФгАЯь
злКЯПМТЧЃЌЮвУЧГЃгУЕФЩЯЯТРЕчзшжЕДѓЖрбЁШЁдк1kЕН10kжЎМфЃЌОпЬхЕНЕзЖрДѓЭЈГЃвЊИљОнЪЕМЪашЧѓРДбЁЃЌЭЈГЃЧщПіЯТдкБъзМЗЖЮЇФкОЭПЩвдСЫЃЌВЛвЛЖЈЪЧвЛИіЙЬЖЈЕФжЕЁЃ
1.3 28BYJ-48аЭВННјЕчЛњЯъНтгыЪЕР§
1.3.1 ЕчЛњЕФЗжРр
ЕчЛњЕФЗжРрЗНЪНгаКмЖрЃЌДггУЭОЕФНЧЖШПЩЛЎЗжЕчЛњЗжЮЊЧ§ЖЏРрЕчЛњКЭПижЦРрЕчЛњЁЃжБСїЕчЛњЪєгкЧ§ЖЏРрЕчЛњЃЌетжжЕчЛњЪЧНЋЕчФмзЊЛЛГЩЛњаЕФмЃЌжївЊгІгУдкЕчзъЁЂаЁГЕТжзгЁЂЕчЗчЩШЁЂЯДвТЛњЕШЕШЩшБИЩЯЁЃВННјЕчЛњЪєгкПижЦРрЕчЛњЃЌЫќЪЧНЋТіГхаХКХзЊЛЛГЩвЛИізЊЖЏНЧЖШЕФЕчЛњЃЌдкЗЧГЌдиЕФЧщПіЯТЃЌЕчЛњЕФзЊЫйЁЂЭЃжЙЕФЮЛжУжЛШЁОігкТіГхаХКХЕФЦЕТЪКЭТіГхЪ§ЃЌжївЊгІгУдкздЖЏЛЏвЧБэЁЂЛњЦїШЫЁЂздЖЏЩњВњСїЫЎЯпЁЂПеЕїЩШвЖзЊЖЏЕШЩшБИЁЃ
ВННјЕчЛњЗжЮЊЗДгІЪНЁЂгРДХЪНКЭЛьКЯЪНШ§жжЁЃ
ЗДгІЪНВННјЕчЛњЃКНсЙЙМђЕЅГЩБОЕЭЃЌЕЋЪЧЖЏЬЌадФмВюЁЂаЇТЪЕЭЁЂЗЂШШДѓЁЂПЩППадФбвдБЃжЄЃЌЫљвдЯждкЛљБОвбОБЛЬдЬЁЃ
гРДХЪНВННјЕчЛњЃКЖЏЬЌадФмКУЁЂЪфГіСІОиНЯДѓЃЌЕЋЮѓВюЯрЖдРДЫЕДѓвЛаЉЃЌвђЦфМлИёЕЭЙуЗКгІгУгкЯћЗбадВњЦЗЁЃ
ЛьКЯЪНВННјЕчЛњЃКзлКЯСЫЗДгІЪНКЭгРДХЪНЕФгХЕуЃЌСІОиДѓЁЂЖЏЬЌадФмКУЁЂВНОрНЧаЁЃЌОЋЖШИпЃЌЕЋЪЧНсЙЙЯрЖдРДЫЕИДдгЃЌМлИёвВЯрЖдИпЃЌжївЊгІгУгкЙЄвЕЁЃ
ЮвУЧБОеТФкШнжївЊНВНт28BYJ-48етПюВННјЕчЛњЃЌЦфжа
28——ВННјЕчЛњЕФгааЇзюДѓЭтОЖЪЧ28КСУз
B ——БэЪОЪЧВННјЕчЛњ
Y ——БэЪОЪЧгРДХЪН
J ——БэЪОЪЧМѕЫйаЭ
48——БэЪОЫФЯрАЫХФ
1.3.2 28BYJ-48аЭВННјЕчЛњдРэЯъНт
28BYJ-48ЪЧ4ЯргРДХЪНМѕЫйВННјЕчЛњЃЌЦфЭтЙлШчЯТЭМЫљЪОЃК
 
ЭМ9-4 ВННјЕчЛњЭтЙл
ЮвУЧЯШРДНтЪЭЪВУДЪЧ“4ЯргРДХЪН”ЕФИХФюЃЌ28BYJ-48ЕФФкВПНсЙЙЪОвтЭМ9-2ЫљЪОЁЃЯШПДРяШІЃЌЫќЩЯУцга6ИіГнЃЌЗжБ№БъзЂЮЊ0-5ЃЌетИіНазізЊзгЃЌЙЫУћЫМвхЃЌЫќЪЧвЊзЊЖЏЕФЃЌзЊзгЕФУПИіГнЩЯЖМДјгагРОУЕФДХадЃЌЪЧвЛПщгРДХЬхЃЌетОЭЪЧ“гРДХЪН”ЕФИХФюЃЛдйПДЭтШІЃЌетИіОЭЪЧЖЈзгЃЌЫќЪЧБЃГжВЛЖЏЕФЃЌЪЕМЪЩЯЫќЪЧИњЕчЛњЕФЭтПЧЙЬЖЈдквЛЦ№ЕФЃЌЫќЩЯУцга8ИіГнЃЌЖјУПИіГнЩЯЖМВјЩЯСЫвЛИіЯпШІШЦзщЃЌе§ЖдзХЕФ2ИіГнЩЯЕФШЦзщгжЪЧДЎСЊдквЛЦ№ЕФЃЌвВОЭЪЧЫЕе§ЖдзХЕФ2ИіШЦзщзмЪЧЛсЭЌЪБЕМЭЈЛђЙиЖЯЕФЃЌШчДЫОЭаЮГЩСЫ4ЯрЃЌдкЭМжаЗжБ№БъзЂЮЊA-B-C-DЃЌетОЭЪЧ“4Яр”ЕФИХФюЁЃ
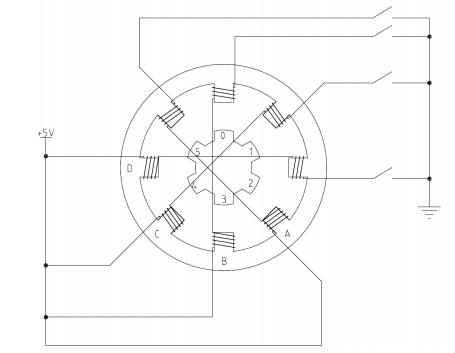
ЭМ9-5 ВННјЕчЛњФкВПНсЙЙЪОвтЭМ
ЯждкЮвУЧЗжЮівЛЯТЫќЕФЙЄзїдРэЃК
МйЖЈЕчЛњЕФЦ№ЪМзДЬЌОЭШчЩЯЭМЫљЪОЃЌЦ№ЪМЪБЪЧBЯрШЦзщЕФПЊЙиБеКЯЃЌBЯрШЦзщЕМЭЈЃЌФЧУДЕМЭЈЕчСїОЭЛсдке§ЩЯКЭе§ЯТСНИіЖЈзгГнЩЯВњЩњДХадЃЌетСНИіЖЈзгГнЩЯЕФДХадОЭЛсЖдзЊзгЩЯЕФ0КЭ3КХГнВњЩњзюЧПЕФЮќв§СІЃЌОЭЛсШчЭМЫљЪОЕФФЧбљЃЌзЊзгЕФЕФ0КХГндке§ЩЯЁЂ3КХГндке§ЯТЖјДІгкЦНКтзДЬЌЃЛДЫЪБЮвУЧЛсЗЂЯжЃЌзЊзгЕФ1КХГнгыгвЩЯЕФЖЈзгГнвВОЭЪЧCЯрЕФвЛИіШЦзщГЪЯжвЛИіКмаЁЕФМаНЧЃЌ2КХГнгыгвБпЕФЖЈзгГнвВОЭЪЧDЯрШЦзщГЪЯжвЛИіЩдЮЂДѓвЛЕуЕФМаНЧЃЌКмУїЯдетИіМаНЧЪЧ1КХГнКЭCШЦзщМаНЧЕФ2БЖЃЌЭЌРэЃЌзѓВрЕФЧщПівВЪЧвЛбљЕФЁЃ
НгЯТРДЃЌЮвУЧАбBЯрШЦзщЖЯПЊЃЌЖјЪЙCЯрШЦзщЕМЭЈЃЌФЧУДКмУїЯдЃЌгвЩЯЕФЖЈзгГнНЋЖдзЊзг1КХГнВњЩњзюДѓЕФЮќв§СІЃЌЖјзѓЯТЕФЖЈзгГнНЋЖдзЊзг4КХГнЃЌВњЩњзюДѓЕФЮќв§СІЃЌдкетИіЮќв§СІЕФзїгУЯТЃЌзЊзг1ЁЂ4КХГнНЋЖдЦыЕНгвЩЯКЭзѓЯТЕФЖЈзгГнЩЯЖјБЃГжЦНКтЃЌШчДЫЃЌзЊзгОЭзЊЙ§СЫЦ№ЪМзДЬЌЪБ1КХГнКЭCЯрШЦзщФЧИіМаНЧЕФНЧЖШЁЃ
дйНгЯТРДЃЌЖЯПЊCЯрШЦзщЃЌЕМЭЈDЯрШЦзщЃЌЙ§ГЬгыЩЯЪіЕФЧщПіЭъШЋЯрЭЌЃЌзюжеНЋЪЙзЊзг2ЁЂ5КХГнгыЖЈзгDЯрШЦзщЖдЦыЃЌзЊзггжзЊЙ§СЫЩЯЪіЭЌбљЕФНЧЖШЁЃ
ФЧУДКмУїЯдЃЌЕБAЯрШЦзщЕМЭЈЃЌМДЭъГЩвЛИіB-C-D-AЕФЫФНкХФВйзїКѓЃЌзЊзгЕФ0ЁЂ3КХГнНЋгЩдРДЕФЖдЦыЕНЩЯЯТ2ИіЖЈзгГнЃЌЖјБфЮЊСЫЖдЦыЕНзѓЩЯКЭгвЯТЕФСНИіЖЈзгГнЩЯЃЌМДзЊзгзЊЙ§СЫвЛИіЖЈзгГнЕФНЧЖШЁЃвРДЫРрЭЦЃЌдйРДвЛИіЫФНкХФЃЌзЊзгОЭНЋдйзЊЙ§вЛИіГнЕФНЧЖШЃЌ8ИіЫФНкХФвдКѓзЊзгНЋзЊЙ§ЭъећЕФвЛШІЃЌЖјЦфжаЕЅИіНкХФЪЙзЊзгзЊЙ§ЕФНЧЖШОЭКмШнМЦЫуГіРДСЫЃЌМД360ЖШ÷(8×4)=11.25ЖШЃЌетИіжЕОЭНазіВННјНЧЖШЁЃЖјЩЯЪіетжжЙЄзїФЃЪНОЭЪЧВННјЕчЛњЕФЕЅЫФХФФЃЪН——ЕЅЯрШЦзщЭЈЕчЫФНкХФЁЃ
ЮвУЧдйРДНВНтвЛжжОпгаИќгХадФмЕФЙЄзїФЃЪНЃЌФЧОЭЪЧдкЕЅЫФХФЕФУПСНИіНкХФжЎМфдйВхШывЛИіЫЋШЦзщЕМЭЈЕФжаМфНкХФЃЌзщГЩАЫХФФЃЪНЁЃБШШчЃЌдкДгBЯрЕМЭЈЕНCЯюЕМЭЈЕФЙ§ГЬжаЃЌМйШчвЛИіBЯрКЭCЯрЭЌЪБЕМЭЈЕФНкХФЃЌетИіЪБКђЃЌгЩгкBЁЂCСНИіШЦзщЕФЖЈзгГнЖдЫќУЧИННќЕФзЊзгГнЭЌЪБВњЩњЯрЭЌЕФЮќв§СІЃЌетНЋЕМжТетСНИізЊзгГнЕФжааФЯпЖдБШЕНBЁЂCСНИіШЦзщЕФжааФЯпЩЯЃЌвВОЭЪЧаТВхШыЕФетИіНкХФЪЙзЊзгзЊЙ§СЫЩЯЪіЕЅЫФХФФЃЪНжаВННјНЧЖШЕФвЛАыЃЌМД5.625ЖШЁЃетбљвЛРДЃЌОЭЪЙзЊЖЏОЋЖШдіМгСЫвЛБЖЃЌЖјзЊзгзЊЖЏвЛШІдђашвЊ8×8=64ХФСЫЁЃСэЭтЃЌаТдіМгЕФетИіжаМфНкХФЃЌЛЙЛсдкдРДЕЅЫФХФЕФСНИіНкХФв§СІжЎМфгжМгСЫвЛАбв§СІЃЌДгЖјПЩвдДѓДѓдіМгЕчЛњЕФећЬхХЄСІЪфГіЃЌЪЙЕчЛњИќ“гаОЂ”СЫЁЃ
Г§СЫЩЯЪіЕФЕЅЫФХФКЭАЫХФЕФЙЄзїФЃЪНЭтЃЌЛЙгавЛИіЫЋЫФХФЕФЙЄзїФЃЪН——ЫЋШЦзщЭЈЕчЫФНкХФЁЃЦфЪЕОЭЪЧАбАЫХФФЃЪНжаЕФСНИіШЦзщЭЌЪБЭЈЕчЕФФЧЫФХФЕЅЖРФУГіРДЃЌЖјЩсЦњЕєЕЅШЦзщЭЈЕчЕФФЧЫФХФЖјвбЁЃЦфВННјНЧЖШЭЌЕЅЫФХФЪЧвЛбљЕФЃЌЕЋгЩгкЫќЪЧСНИіШЦзщЭЌЪБЕМЭЈЃЌЫљвдХЄОиЛсБШЕЅЫФХФФЃЪНДѓЃЌдкДЫОЭВЛзіЙ§ЖрНтЪЭСЫЁЃ
АЫХФФЃЪНЪЧетРр4ЯрВННјЕчЛњЕФзюМбЙЄзїФЃЪНЃЌФмзюДѓЯоЖШЕФЗЂЛгЕчЛњЕФИїЯюадФмЃЌвВЪЧОјДѓЖрЪ§ЪЕМЪЙЄГЬжаЫљбЁдёЕФФЃЪНЃЌвђДЫЮвУЧОЭжиЕуРДНВНтШчКЮгУЕЅЦЌЛњГЬађРДПижЦЕчЛњАДАЫХФФЃЪНЙЄзїЁЃ
1.3.3 ШчКЮШУЕчЛњзЊЖЏ
дйжиаТПДвЛЯТЩЯУцЕФВННјЕчЛњЭтЙлЭМКЭФкВПНсЙЙЭМЃКВННјЕчЛњвЛЙВга5Иљв§ЯпЃЌЦфжаКьЩЋЕФЪЧЙЋЙВЖЫЃЌСЌНгЕН5VЕчдДЃЌНгЯТРДЕФГШЁЂЛЦЁЂЗлЁЂРЖОЭЖдгІСЫAЁЂBЁЂCЁЂDЯрЃЛФЧУДШчЙћвЊЕМЭЈAЯрШЦзщЃЌОЭжЛашНЋГШЩЋЯпНгЕиМДПЩЃЌBЯрдђЛЦЩЋНгЕиЃЌвРДЫРрЭЦЃЛдйИљОнЩЯЪіЕЅЫФХФКЭАЫХФЙЄзїЙ§ГЬЕФНВНтЃЌПЩвдЕУГіЯТУцЕФШЦзщПижЦЫГађБэЃК
Бэ9-1 АЫХФФЃЪНШЦзщПижЦЫГађБэ
|
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
|
P1-Кь
|
VCC
|
VCC
|
VCC
|
VCC
|
VCC
|
VCC
|
VCC
|
VCC
|
|
P2-ГШ
|
GND
|
GND
|
|
|
|
|
|
GND
|
|
P3-ЛЦ
|
|
GND
|
GND
|
GND
|
|
|
|
|
|
P4-Зл
|
|
|
|
GND
|
GND
|
GND
|
|
|
|
P5-РЖ
|
|
|
|
|
|
GND
|
GND
|
GND
|
ЮвУЧАхзгЩЯПижЦВННјЕчЛњВПЗжЪЧКЭАхзгЩЯЕФЯдЪОПижЦЕФ74HC138выТыЦїВПЗжИДгУЕФP1.0ЕНP1.3ЃЌетИіВПЗжЮвУЧдк“ШЋАхзгВтЪдЪгЦЕ”РяБпвбОНВЙ§СЫЃЌПЩвдЭЈЙ§ЕїећЬјЯпУБЪЕЯжВННјЕчЛњЕФПижЦЃЌШчЭМ9-6ЫљЪОЁЃ
 ЭМ9-6 ЯдЪОвыТыЦїКЭВННјЕчЛњНгПкЬјЯпУБ ЭМ9-6 ЯдЪОвыТыЦїКЭВННјЕчЛњНгПкЬјЯпУБ
ШчЙћДѓМвЪЙгУЕчЛњЕФЛАЃЌашвЊАб4ИіЬјЯпУБЖМЕїЕНЬјЯпзщЕФзѓВрЃЌМДзѓВреыКЭжаМфеыСЌЭЈЃЌОЭПЩвдЪЙгУP1.0ЕНP1.3ПижЦВННјЕчЛњСЫЃЌвЊдйЪЙгУЯдЪОВПЗжЕФЛАЃЌОЭвЊдйЛЛЛиЕНгвВрСЫЁЃФЧШчЙћДѓМвМШЯыШУЯдЪОВПЗже§ГЃЙЄзїЃЌгжЯыШУЕчЛњЙЄзїИУдѕУДАьФиЃПЬјЯпУББЃГждкгвВрЃЌгУЖХАюЯпАбВННјЕчЛњЕФПижЦв§НХЃЈМДзѓВрЕФХХеыЃЉСЌНгЕНЦфЫќЕФднВЛЪЙгУЕФЕЅЦЌЛњIOЩЯМДПЩЁЃ
дйРДПДвЛЯТЮвУЧВННјЕчЛњЕФдРэЭМЃЌВННјЕчЛњЕФПижЦЕчТЗШчЯТЃК
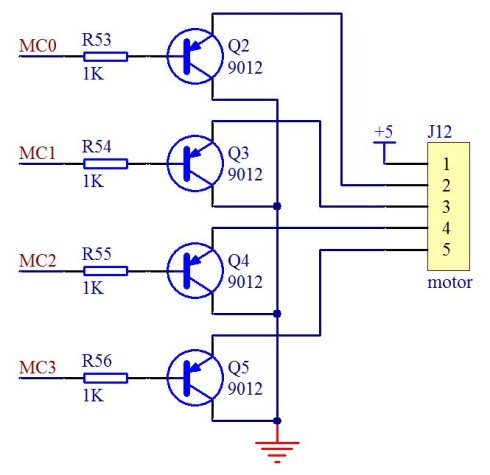
ЭМ9-7 ВННјЕчЛњПижЦЕчТЗ
ГЯШЛЃЌЕЅЦЌЛњЕФIOПкПЩвджБНгЪфГі0VКЭ5VЕФЕчбЙЃЌЕЋЪЧЕчСїЧ§ЖЏФмСІЃЌвВОЭЪЧДјдиФмСІЗЧГЃгаЯоЃЌЫљвдЮвУЧдкУПЯрЕФПижЦЯпЩЯЖМдіМгвЛИіШ§МЋЙмРДЬсИпЧ§ЖЏФмСІЁЃгЩЭМжаПЩвдПДГіЃЌШєвЊЪЙAЯрЕМЭЈЃЌдђБиаыЪЧQ2ЕМЭЈЃЌДЫЪБAЯрвВОЭЪЧГШЩЋЯпОЭЯрЕБгкНгЕиСЫЃЌгкЪЧAЯрШЦзщЕМЭЈЃЌДЫЪБЕЅЦЌЛњP1ПкЕЭ4ЮЛгІЪфГі0b1110ЃЌМД0xEЃЛШчвЊAЁЂBЯрЭЌЪБЕМЭЈЃЌФЧУДОЭЪЧQ2ЁЂQ3ЕМЭЈЃЌP1ПкЕЭ4ЮЛгІЪфГі0b1100ЃЌМД0xCЃЌвРДЫРрЭЦЃЌЮвУЧПЩвдЕУЕНЯТУцЕФАЫХФНкХФЕФIOПижЦДњТыЪ§зщЃК
unsigned char code BeatCode[8] = { 0xE, 0xC, 0xD, 0x9, 0xB, 0x3, 0x7, 0x6 };
ЕНетРяЃЌЫЦКѕЫљгаЕФТпМЮЪЬтЖМНтОіСЫЃЌбЛЗНЋетИіЪ§зщФкЕФжЕЫЭЕНP1ПкОЭааСЫЁЃЕЋЪЧЃЌжЛвЊдйЩюШыЯывЛЯТОЭЛсЗЂЯжЛЙгаИіЮЪЬтЃКЖрГЄЪБМфЫЭвЛДЮЪ§ОнЃЌвВОЭЪЧЫЕвЛИіНкХФвЊГжајЖрГЄЪБМфКЯЪЪФиЃПЪЧЫцвтЕФТ№ЃПЕБШЛВЛЪЧСЫЃЌетИіЪБМфЪЧгЩВННјЕчЛњЕФЦєЖЏЦЕТЪОіЖЈЕФЁЃЦєЖЏЦЕТЪЃЌОЭЪЧВННјЕчЛњдкПедиЧщПіЯТФмЙЛе§ГЃЦєЖЏЕФзюИпТіГхЦЕТЪЃЌШчЙћТіГхЦЕТЪИпгкИУжЕЃЌЕчЛњОЭВЛФме§ГЃЦєЖЏЁЃЯТБэЪЧгЩГЇМвЬсЙЉЕФВННјЕчЛњВЮЪ§БэЃК
Бэ9-2 28BYJ-48ВННјЕчЛњВЮЪ§Бэ
|
ЙЉЕчЕчбЙ
|
ЯрЪ§
|
ЯрЕчзш
Ω
|
ВННјНЧЖШ
|
МѕЫйБШ
|
ЦєЖЏЦЕТЪ
P.P.S
|
зЊОи
g.cm
|
дыЩљ
dB
|
ОјдЕНщ
ЕчЧПЖШ
|
|
5V
|
4
|
50±10%
|
5.625/64
|
1:64
|
≥550
|
≥300
|
≤35
|
600VAC
|
БэжаИјГіЕФВЮЪ§ЪЧ≥550ЃЌЕЅЮЛЪЧP.P.SЃЌМДУПУыТіГхЪ§ЃЌетРяЕФвтЫМОЭЪЧЫЕЃКУПИіЕчЛњБЃжЄдкФуУПУыИјГі550ИіВННјТіГхЕФЧщПіЯТЃЌЕчЛњПЩвдЦєЖЏЁЃЛЛЫуГЩЕЅНкХФГжајЪБМфОЭЪЧ1s÷550=1.8msЃЌФЧЮЊСЫШУЕчЛњФмЙЛЦєЖЏЃЌЮвУЧПижЦНкХФЫЂаТЪБМфДѓгк1.8msОЭПЩвдСЫЁЃгаСЫетИіВЮЪ§ЃЌЮвУЧОЭПЩвдЖЏЪжаДГізюМђЕЅЕФЕчЛњзЊЖЏГЬађСЫЃЌШчЯТЃК
#include<reg52.h>
unsigned char code BeatCode[8] = { //ВННјЕчЛњНкХФЖдгІЕНIOПижЦЕчЦНЕФДњТы
0xE, 0xC, 0xD, 0x9, 0xB, 0x3, 0x7, 0x6
};
void delay(unsigned int cnt);
void main()
{
unsigned char buf;
unsigned char step = 0;
while(1)
{
buf = P1 & 0xF0; //гУbufднДцP1ПкЕФИп4ЮЛЃЌЖјЕЭ4ЮЛЧхСу
buf |= BeatCode[step]; //bufЕЭ4ЮЛИФЮЊЯргІЕФНкХФДњТыжЕ
P1 = buf; //аоИФКѓЭъБЯКѓЕФжЕЫЭЛиЕНP1Пк
step++; //ВННјНкХФЕнді
step &= 0x07; //гУ“гы”ЗНЪНЪЕЯжЕН8ЙщСу
delay(200); //бгЪБ2msЃЌМД2msжДаавЛХФ
}
}
void delay(unsigned int cnt)
{
while (cnt--);
}
ИЯПьБрвыЯТдиЕНАхзгЩЯЪдЪдАЩЃЁПДПДЕчЛњзЊСЫУЛгаЃПМЧЕУЛЛЬјЯпХЖЃЁ
1.3.4 зЊЖЏОЋЖШгыЩюШыЗжЮі
зЊЪЧзЊСЫЃЌЕЋЪЧВЛЪЧИаОѕгаЕуВЛЬЋЖдОЂФиЃПЬЋТ§СЫЃПБ№МБЃЌдлУЧМЬајЁЃИљОнБОеТПЊЭЗНВНтЕФдРэЃЌАЫХФФЃЪНЪБЃЌВННјЕчЛњзЊЙ§вЛШІЪЧашвЊ64ИіНкХФЃЌЖјЮвУЧГЬађжаЪЧУПИіНкХФГжај2msЃЌФЧУДзЊвЛШІОЭгІИУЪЧ128msЃЌМД1УыжгзЊ7ШІЖрЃЌПЩдѕУДПДЩЯШЅЫќКУЯёЪЧ7УыЖрВХзЊСЫвЛШІФиЃП
ФЧУДЃЌЪЧЪБКђРДСЫНт“гРДХЪНМѕЫйВННјЕчЛњ”жаетИі“МѕЫйЕФИХФюСЫ”ЁЃЯТЭМЪЧетИі28BYJ-48ВННјЕчЛњЕФВ№НтЭМЃЌДгЭМжаПЩвдПДЕНЃЌЮЛгкзюжааФЕФФЧИіАзЩЋаЁГнТжВХЪЧВННјЕчЛњЕФзЊзгЪфГіЃЌ64ИіНкХФжЛЪЧШУетИіаЁГнТжзЊСЫвЛШІЃЌШЛКѓЫќДјЖЏФЧИіЧГРЖЩЋЕФДѓГнТжЃЌетОЭЪЧвЛМЖМѕЫйЁЃДѓМвПДвЛЯТгвЩЯЗНЕФАзЩЋГнТжЕФНсЙЙЃЌГ§ЕчЛњзЊзгКЭзюжеЪфГіжсЭтЕФ3ИіДЋЖЏГнТжЖМЪЧетбљЕФНсЙЙЃЌвЛВуЖрГнКЭвЛВуЩйГнЙЙГЩЃЌЖјУПвЛИіГнТжЖМгУздМКЕФЩйГнВуШЅЧ§ЖЏЯТвЛИіГнТжЕФЖрГнВуЃЌетбљУП2ИіГнТжЖМЙЙГЩвЛМЖМѕЫйЃЌвЛЙВОЭгаСЫ4МЖМѕЫйЃЌФЧУДзмЕФМѕЫйБШЪЧЖрЩйФиЃПМДзЊзгвЊзЊЖрЩйШІзюжеЪфГіжсВХзЊвЛШІФиЃП

ЭМ9-8 ВННјЕчЛњФкВПГнТжЪОвтЭМ
ЛиЭЗПДвЛЯТЕчЛњВЮЪ§БэжаЕФМѕЫйБШетИіВЮЪ§АЩ——1:64ЃЌзЊзгзЊ64ШІЃЌзюжеЪфГіжсВХЛсзЊвЛШІЃЌвВОЭЪЧашвЊ64×64=4096ИіНкХФЪфГіжсВХзЊЙ§вЛШІЃЌ2ms×4096=8192msЃЌ8УыЖрВХзЊвЛШІФиЃЌЪЧВЛЪЧИќИеВХЕФЪЕбщНсЙће§КУЮЧКЯСЫЃП4096ИіНкХФзЊЖЏвЛШІЃЌФЧУДвЛИіНкХФзЊЖЏЕФНЧЖШ——ВННјНЧЖШОЭЪЧ360/4096ЃЌПДвЛЯТБэжаЕФВННјНЧЖШВЮЪ§5.625/64ЃЌЫувЛЯТОЭжЊЕРетСНИіжЕЪЧЯрЕШЕФЃЌвЛЧаЖМвбЮЧКЯСЫЁЃ
OKЃЌЙигкЛљБОЕФПижЦдРэБОИУЕНетРяОЭШЋВПНсЪјСЫЃЌЕЋЪЧЃЌЮвУЧЯЃЭћДѓМвЖМФмХрбјвЛжж“ЪЕМљЪЧМьбщецРэЕФЮЈвЛБъзМ”ЕФЫМЮЌЗНЪНЃЁЛиЯывЛЯТЃЌВННјЕчЛњзюДѓЕФЬиЕуЪЧЪВУДЃПОЋШЗПижЦзЊЖЏСПЃЁФЧУДЮвУЧЪЧВЛЪЧгІИУМьбщвЛЯТЫќЕНЕзЪЧВЛЪЧФмОЋШЗФиЃПОЋШЗЕНЪВУДГЬЖШФиЃПдѕУДРДМьбщФиЃПШУЫќзЊЙ§90ЖШЃЌШЛКѓСПвЛЯТзМВЛзМЃПвВааЃЌЕЋЪЧШчЙћЫќжЛВюСЫ1ЖШЩѕжСВЛЕН1ЖШЃЌФуФмзМШЗВтСПГіРДТ№ЃПдкУЛгаОЋУмвЧЦїЕФЧщПіКмФбЁЃЮвУЧЛЙЪЧШУЫќЖрзЊМИИіећШІЃЌПДПДЫќзюКѓЭЃЯТЕФЮЛжУЛЙЪЧВЛЪЧдРДЕФЮЛжУЁЃЖдгІЕФЃЌЮвУЧАбГЬађаоИФвЛЯТЃЌвдЗНБуПижЦЕчЛњзЊЙ§ШЮвтЕФШІЪ§ЁЃ
#include<reg52.h>
void delay(unsigned int cnt);
void TrunMotor(unsigned long angle);
void main()
{
TrunMotor(360*25); //360ЖШ*25ЃЌМД25ШІ
while(1);
}
void TrunMotor(unsigned long angle)
{
unsigned char buf;
unsigned char step = 0;
unsigned long beats = 0;
unsigned char code BeatCode[8] = { //ВННјЕчЛњНкХФЖдгІЕНIOПижЦЕчЦНЕФДњТы
0xE, 0xC, 0xD, 0x9, 0xB, 0x3, 0x7, 0x6
};
beats = (angle * 4096) / 360; //МЦЫуашвЊЕФНкХФЪ§ЃЌ4096ХФЖдгІвЛШІ
while (beats--)
{
buf = P1 & 0xF0; //гУbufднДцP1ПкЕФИп4ЮЛЃЌЖјЕЭ4ЮЛЧхСу
buf |= BeatCode[step]; //bufЕЭ4ЮЛИФЮЊЯргІЕФНкХФДњТыжЕ
P1 = buf; //аоИФКѓЭъБЯКѓЕФжЕЫЭЛиЕНP1Пк
step++; //ВННјНкХФЕнді
step &= 0x07; //гУ“гы”ЗНЪНЪЕЯжЕН8ЙщСу
delay(200); //бгЪБ2msЃЌМД2msжДаавЛХФ
}
P1 |= 0x0F; //ЙиБеЕчЛњЫљгаЕФЯр
}
void delay(unsigned int cnt)
{
while (cnt--);
}
ЩЯЪіГЬађжаЃЌЮвУЧЯШБраДСЫвЛИіПижЦЕчЛњзЊЙ§жИЖЈНЧЖШЕФКЏЪ§ЃЌетИіНЧЖШжЕгЩКЏЪ§ЕФаЮЪНВЮЪ§ИјГіЃЌШЛКѓдкжїКЏЪ§жаОЭПЩвдЗНБуЕФЭЈЙ§ИќИФЕїгУЪБЕФЪЕМЪВЮЪ§РДПижЦЕчЛњзЊЙ§ШЮвтЕФНЧЖШСЫЁЃЮвУЧгУСЫ360*25ЃЌвВОЭЪЧ25ШІЃЌЕБШЛФувВПЩвдЫцвтИФЮЊЦфЫќЕФжЕЃЌПДПДЪЧЪВУДНсЙћЁЃЮвУЧЕФГЬађЛсжДаа25*8=200УыЕФЪБМфЃЌЯШМЧЯТЪфГіжсЕФГѕЪМЮЛжУЃЌШЛКѓЩЯЕчВЂФЭаФЕШЫќжДааЭъБЯЃЌПДвЛЯТЃЌЪЧВЛЪЧ……гаЮѓВюЃПдѕУДЛиЪТЃЌФФЖљГіЮЪЬтСЫЃЌВЛЪЧЫЕФмОЋШЗПижЦзЊЖЏСПТ№ЃП
етИіЮЪЬтЦфЪЕЪЧГідкСЫМѕЫйБШЩЯЃЌдйРДПДвЛЯТЃЌГЇМвИјГіЕФМѕЫйБШЪЧ1:64ЃЌВЛЙмЪЧФФИіГЇМвЩњВњЕФЕчЛњЃЌжЛвЊаЭКХЪЧ28BYJ-48ЃЌЦфБъГЦЕФМѕЫйБШОЭЖМЪЧ1:64ЁЃЕЋЪЕМЪЩЯФиЃПОЙ§ЮвУЧЕФВ№НтМЦЫуЗЂЯжЃКецЪЕзМШЗЕФМѕЫйБШВЂВЛЪЧетИіжЕ1:64ЃЌЖјЪЧ1:63.684ЃЁЕУГіетИіЪ§ОнЕФЗНЗЈвВКмМђЕЅЃЌЪЕМЪЪ§вЛЯТУПИіГнТжЕФГнЪ§ЃЌШЛКѓНЋИїМЖМѕЫйБШЯрГЫЃЌОЭПЩвдЕУГіНсЙћСЫЃЌЪЕВтЕФМѕЫйБШЮЊ(32/9)*(22/11)*(26/9)*(31/10)≈63.684ЃЌДгЖјЕУГіЪЕМЪЮѓВюЮЊ0.0049ЃЌМДдМЮЊАйЗжжЎ0.5ЃЌзЊ100ШІОЭЛсВюГіАыШІЃЌФЧУДЮвУЧИеВХзЊСЫ25ШІЃЌЪЧВЛЪЧОЭВюСЫАЫЗжжЎвЛШІСЫЃЌвВОЭЪЧ45ЖШЃЌПДвЛЯТИеВХЕФЮѓВюЪЧ45ЖШАЩЁЃФЧУДАДее1:63.684ЕФЪЕМЪМѕЫйБШЃЌПЩвдЕУГізЊЙ§вЛШІЫљашвЊНкХФЪ§ЪЧ64*63.684≈4076ЁЃФЧУДОЭАбЩЯУцГЬађжаЕчЛњЧ§ЖЏКЏЪ§РяЕФ4096ИФГЩ4076дйЪдвЛЯТАЩЁЃЪЧВЛЪЧПДВЛГіЫПКСЕФЮѓВюСЫЃПЕЋЪЕМЪЩЯЮѓВюЛЙЪЧДцдкЕФЃЌвђЮЊЩЯУцЕФМЦЫуНсЙћЖМЪЧдМЕШЕУГіЕФЃЌЪЕМЪЮѓВюДѓдМЪЧ0.000056ЃЌМДЭђЗжжЎ0.56ЃЌзЊвЛЭђШІВХЛсВюГіАыШІЃЌвбОПЩвдКіТдВЛМЦСЫЁЃ
ФЧУДГЇМвЕФВЮЪ§ЮЊЪВУДЛсгаЮѓВюФиЃПФбЕРГЇМвВЛжЊЕРТ№ЃПвЊНтЪЭетИіЮЪЬтЃЌЮвУЧЕУЛиЕНЪЕМЪгІгУжаЃЌВННјЕчЛњзюЭЈГЃЕФФПЕФЪЧПижЦФПБъзЊЙ§вЛЖЈЕФНЧЖШЃЌЭЈГЃЖМЪЧдк360ЖШвдФкЕФЃЌЖјетИі28BYJ-48зюГѕЕФЩшМЦФПЕФЪЧгУРДПижЦПеЕїЕФЩШвЖЕФЃЌЩШвЖЕФЛюЖЏЗЖЮЇЪЧВЛЛсГЌЙ§180ЖШЕФЃЌЫљвддкетжжгІгУГЁКЯЯТЃЌГЇЩЬИјГівЛИіНќЫЦЕФећЪ§МѕЫйБШ1:64вбОзуЙЛОЋШЗСЫЃЌетвВЪЧКЯЧщКЯРэЕФЁЃШЛЖјЃЌе§ШчЮвУЧЕФГЬађФЧбљЃЌЮвУЧВЛвЛЖЈЪЧвЊгУЫќРДЧ§ЖЏПеЕїЩШвЖЃЌЮвУЧПЩвдШУЫќзЊЖЏКмЖрШІРДИЩБ№ЕФЃЌетИіЪБКђОЭашвЊИќЮЊОЋШЗЕФЪ§ОнСЫЃЌетвВЪЧЮвУЧЯЃЭћЖСепЖМФмСЫНтВЂеЦЮеЕФЃЌОЭЪЧЫЕЮвУЧвЊФмздМК“ЩшМЦ”ЯЕЭГВЂНтОіЦфжаЗЂЯжЕФЮЪЬтЃЌЖјВЛвЊБЛЫљЮНЕФ“ЯжГЩЕФЗНАИ”ЯожЦзЁЫМТЗЁЃ
1.3.5 БраДЪЕгУГЬађЕФЛљДЁ
НтОіСЫОЋЖШЮЪЬтЃЌШУЮвУЧдйДЮЛиЕНЮвУЧЕФЕчЛњПижЦГЬађЩЯАЩЁЃЩЯУцИјГіЕФСНИіР§ГЬЖМВЛЪЧЪЕгУЕФГЬађЃЌЮЊЪВУДЃПвђЮЊГЬађжаДцдкДѓЖЮЕФбгЪБЃЌЖјдкбгЪБЕФЪБКђЪЧЪВУДЦфЫќЕФЪТЖМИЩВЛСЫЕФЃЌЯыЯыЕкЖўИіГЬађЃЌећећ200УыЪВУДБ№ЕФЪТЖМИЩВЛСЫЃЌетдкЪЕМЪЕФПижЦЯЕЭГжаЪЧОјЖдВЛдЪаэЕФЁЃФЧУДдѕУДИФдьвЛЯТФиЃПЕБШЛЛЙЪЧгУЖЈЪБжаЖЯРДЭъГЩСЫЃЌМШШЛУПИіНкХФГжајЪБМфЪЧ2msЃЌФЧЮвУЧжБНггУЖЈЪБЦїЖЈЪБ2msРДЫЂаТНкХФОЭааСЫЁЃЙигкЖЈЪБЦїЕФвЛаЉМФДцЦїЕФЪЙгУКЭЩшжУНЬГЬПЩЕН http://www.51hei.com ШЅПДЕк17ПЮРяУцгаЯъНтЃЌИФдьКѓЕФГЬађШчЯТЃК
#include<reg52.h>
unsigned long beats = 0;
void TrunMotor(unsigned long angle);
void main()
{
//ХфжУT0ЙЄзїдкФЃЪН1ЃЌЖЈЪБ2ms
TMOD = 0x01;
TH0 = 0xF8;
TL0 = 0xCD;
TR0 = 1;
ET0 = 1;
EA = 1;
TrunMotor(360*2+180); //ПижЦЕчЛњзЊЖЏ2ШІАы
while(1);
}
void TrunMotor(unsigned long angle)
{
//дкМЦЫуЧАЙиБежаЖЯЃЌЭъГЩКѓдйДђПЊЃЌвдБмУтжаЖЯДђЖЯМЦЫуЙ§ГЬЖјдьГЩДэЮѓ
EA = 0;
beats = (angle * 4076) / 360; //ЪЕВтЮЊ4076ХФзЊЖЏвЛШІ
EA = 1;
}
void InterruptTimer0() interrupt 1
{
unsigned char buf;
static unsigned char step = 0; //ЪЙгУОВЬЌБфСПвдБЃДцзЁЧАвЛДЮЕФжЕ
unsigned char code BeatCode[8] = { //ВННјЕчЛњНкХФЖдгІЕНIOПижЦЕчЦНЕФДњТы
0xE, 0xC, 0xD, 0x9, 0xB, 0x3, 0x7, 0x6
};
TH0 = 0xF8; //вчГіКѓНјШыжаЖЯжиаТИГжЕ
TL0 = 0xCD;
if (beats != 0)
{
buf = P1 & 0xF0; //гУbufднДцP1ПкЕФИп4ЮЛЃЌЖјЕЭ4ЮЛЧхСу
buf |= BeatCode[step]; //bufЕЭ4ЮЛИФЮЊЯргІЕФНкХФДњТыжЕ
P1 = buf; //аоИФКѓЭъБЯКѓЕФжЕЫЭЛиЕНP1Пк
step++; //ВННјНкХФЕнді
step &= 0x07; //гУ“гы”ЗНЪНЪЕЯжЕН8ЙщСу
beats--;
}
else
{
P1 |= 0x0F; //ЙиБеЕчЛњЫљгаЕФЯр
}
}
ГЬађЛЙЪЧБШНЯМђЕЅЕФЃЌЕчЛњзЊЖЏЕФЦєЖЏКЏЪ§TrunMotorжЛИКд№МЦЫувЛИіашвЊЕФзмНкХФЪ§beatsЃЌШЛКѓдкжаЖЯКЏЪ§ФкМьВтетИіБфСПЃЌВЛЮЊ0ЪБОЭжДааНкХФЫЂаТВйзїЃЌЭЌЪБНЋЦфМѕ1ЃЌжБЕНМѕЕН0ЮЛжУЁЃ
етРяЃЌЮвУЧвЊЬиБ№ЫЕУївЛЯТЕФЪЧTrunMotorКЏЪ§жаЖдEAЕФСНДЮВйзїЁЃЮвУЧПЩвдПДЕНЖдbeatsЕФИГжЕМЦЫугяОфЪЧМадкEA=0;EA=1;етСНаагяОфжаМфЕФЃЌвВОЭЪЧЫЕетааИГжЕМЦЫугяОфдкжДааЧАЯШЙиБеСЫжаЖЯЃЛЖјЕШЫќжДааЭъКѓЃЌВХгжжиаТДђПЊСЫжаЖЯЃЛдкЫќжДааЙ§ГЬжаCPUЪЧВЛЛсЯьгІжаЖЯЕФЃЌМДжаЖЯКЏЪ§InterruptTimer0ВЛЛсБЛжДааЃЛМДЪЙетЪБКђЖЈЪБЦївчГіСЫЃЌжаЖЯЗЂЩњСЫЃЌвВжЛФмЕШД§дкEAжиаТжУ1КѓЃЌВХФмЕУЕНЯьгІЃЌжаЖЯКЏЪ§InterruptTimer0ВХЛсБЛжДааЁЃ
ФЧУДЮЊЪВУДвЊетУДзіФиЃПЮвУЧРДЯывЛЯТЃКвЛПЊЪМОЭЬсЕНСЫЃЌЮвУЧЫљЪЙгУЕФSTC89C52ЕЅЦЌЛњЪЧ8ЮЛЕЅЦЌЛњЃЌетИі8ЮЛЕФИХФюОЭЪЧЫЕЕЅЦЌЛњВйзїЪ§ОнЪБЖМЪЧАД8ЮЛМД1ИізжНкНјааЕФЃЌФЧУДвЊВйзїЖрИізжНкЃЈВЛТлЪЧЖСЛЙЪЧаДЃЉОЭБиаыЗжЖрДЮНјааСЫЃЛЖјЮвУЧГЬађжаЖЈвхЕФbeatsетИіБфСПЪЧunsigned longаЭЃЌЫќвЊеМгУ4ИізжНкЃЌФЧУДЖдЫќЕФИГжЕзюЩйвВвЊЗж4ДЮВХФмЭъГЩСЫЃЛЮвУЧЯыЯѓвЛЯТЃЌМйШчдкЭъГЩСЫЦфжаЕквЛИізжНкЕФИГжЕКѓЃЌЧЁКУжаЖЯЗЂЩњСЫЃЌInterruptTimer0КЏЪ§ЕУЕНжДааЃЌЖјетИіКЏЪ§ФкПЩФмЛсЖдbeatsНјааМѕ1ЕФВйзїЃЌМѕЗЈОЭгаПЩФмЗЂЩњНшЮЛЃЌНшЮЛОЭЛсИФБфЦфЫќЕФзжНкЃЌЕЋвђЮЊДЫЪБЦфЫќЕФзжНкЛЙУЛгаБЛИГШыаТжЕЃЌгкЪЧДэЮѓОЭЛсЗЂЩњСЫЃЌМѕ1ЫљЕУЕНЕФНсЙћОЭВЛЪЧдЄЦкЕФжЕСЫЃЁЫљвдвЊБмУтетжжДэЮѓЕФЗЂЩњОЭЕУЯШднЪБЙиБежаЖЯЃЌЕШИГжЕЭъГЩКѓдйДђПЊжаЖЯЃЛЖјШчЙћЮвУЧЪЙгУЕФЪЧcharЛђbitаЭБфСПЕФЛАЃЌвђЮЊЫќУЧЖМЪЧдкCPUЕФвЛДЮВйзїжаОЭЭъГЩЕФЃЌЫљвдМДЪЙВЛЙижаЖЯЃЌвВВЛЛсЗЂЩњДэЮѓЁЃЮЪЬтЗжЮіЧхГўСЫЃЌШчКЮШЁЩсЛЙЕУИљОнЪЕМЪЧщПіРДЃЌгіЩЯетРрЮЪЬтЕФЪБКђЖрЖрПМТЧПМТЧАЩЁЃ
1.3.6 АќКЌзлКЯгІгУЕФЪЕгУГЬађ
ЩЯУцЮвУЧЫфШЛЭъГЩСЫгУжаЖЯПижЦзЊЖЏЕФГЬађЃЌЕЋЪЕМЪЩЯетИіГЬађЛЙЪЧУЛЖрЩйЪЕгУМлжЕЕФЃЌЮвУЧВЛФмУПДЮЯыШУЫќзЊЖЏЕФЪБКђЖМЩЯЯТЕчАЁЃЌЪЧАЩЁЃЛЙгаЫќВЛЕЋЕУФме§зЊЛЙЕУФмЗДзЊАЁЃЌвВОЭЪЧЫЕВЛЕЋФмзЊЙ§ШЅЃЌЛЙЕУФмзЊЛиРДбНЁЃКУАЩЃЌЮвУЧОЭРДзівЛИіЪЕР§ГЬађАЩЃЌНсКЯЕкАЫеТЕФАДМќГЬађЃЌЮвУЧЩшМЦетбљвЛИіГЬађЃКАДЪ§зжМќ1-9ЃЌПижЦЕчЛњзЊЙ§1-9ШІЃЛХфКЯЩЯЯТМќИФБфзЊЖЏЗНЯђЃЌАДЯђЩЯМќКѓе§ЯђзЊ1-9ШІЃЌЯђЯТМќдђЗДЯђзЊ1-9ШІЃЛзѓМќЙЬЖЈе§зЊ90ЖШЃЌгвМќЙЬЖЈЗДзЊ90ЃЛEscМќжежЙзЊЖЏЁЃГЬађШчЯТЃК
#include <reg52.h>
sbit KEY_IN_1 = P2^4; //ОиеѓАДМќЕФЩЈУшЪфШыв§НХ1
sbit KEY_IN_2 = P2^5; //ОиеѓАДМќЕФЩЈУшЪфШыв§НХ2
sbit KEY_IN_3 = P2^6; //ОиеѓАДМќЕФЩЈУшЪфШыв§НХ3
sbit KEY_IN_4 = P2^7; //ОиеѓАДМќЕФЩЈУшЪфШыв§НХ4
sbit KEY_OUT_1 = P2^3; //ОиеѓАДМќЕФЩЈУшЪфГів§НХ1
sbit KEY_OUT_2 = P2^2; //ОиеѓАДМќЕФЩЈУшЪфГів§НХ2
sbit KEY_OUT_3 = P2^1; //ОиеѓАДМќЕФЩЈУшЪфГів§НХ3
sbit KEY_OUT_4 = P2^0; //ОиеѓАДМќЕФЩЈУшЪфГів§НХ4
const unsigned char code KeyCodeMap[4][4] = { //ОиеѓАДМќБрКХЕНPCБъзММќХЬМќТыЕФгГЩфБэ
{ '1', '2', '3', 0x26 }, //Ъ§зжМќ1ЁЂЪ§зжМќ2ЁЂЪ§зжМќ3ЁЂЯђЩЯМќ
{ '4', '5', '6', 0x25 }, //Ъ§зжМќ4ЁЂЪ§зжМќ5ЁЂЪ§зжМќ6ЁЂЯђзѓМќ
{ '7', '8', '9', 0x28 }, //Ъ§зжМќ7ЁЂЪ§зжМќ8ЁЂЪ§зжМќ9ЁЂЯђЯТМќ
{ '0', 0x1B, 0x0D, 0x27 } //Ъ§зжМќ0ЁЂESCМќЁЂ ЛиГЕМќЁЂ ЯђгвМќ
};
unsigned char KeySta[4][4] = { //ШЋВПОиеѓАДМќЕФЕБЧАзДЬЌ
{1, 1, 1, 1},
{1, 1, 1, 1},
{1, 1, 1, 1},
{1, 1, 1, 1}
};
signed long beats = 0; //ВННјЕчЛњзЊЖЏЕФзмНкХФЪ§
void KeyAction(unsigned char keycode);
void main(void)
{
unsigned char i, j;
unsigned char backup[4][4] = { //АДМќжЕБИЗнЃЌБЃДцЧАвЛДЮЕФжЕ
{1, 1, 1, 1},
{1, 1, 1, 1},
{1, 1, 1, 1},
{1, 1, 1, 1}
};
//ХфжУT0ЙЄзїдкФЃЪН1ЃЌЖЈЪБ1ms
TMOD = 0x01;
TH0 = 0xFC;
TL0 = 0x67;
TR0 = 1;
ET0 = 1;
EA = 1;
while(1)
{
//МьЫїАДМќзДЬЌЕФБфЛЏ
for (i=0; i<4; i++)
{
for (j=0; j<4; j++)
{
if (backup[i][j] != KeySta[i][j])
{
if (backup[i][j] == 0) //АДМќЕЏЦ№ЪБжДааЖЏзї
{
KeyAction(KeyCodeMap[i][j]);
}
backup[i][j] = KeySta[i][j];
}
}
}
}
}
void TrunMotor(signed long angle)
{
//дкМЦЫуЧАЙиБежаЖЯЃЌЭъГЩКѓдйДђПЊЃЌвдБмУтжаЖЯДђЖЯМЦЫуЙ§ГЬЖјдьГЩДэЮѓ
EA = 0;
beats = (angle * 4076) / 360; //ЪЕВтЮЊ4076ХФзЊЖЏвЛШІ
EA = 1;
}
void StopMotor()
{
EA = 0;
beats = 0;
EA = 1;
}
void KeyAction(unsigned char keycode)
{
static bit dirMotor = 0; //ЕчЛњзЊЖЏЗНЯђ
if ((keycode>='1') && (keycode<='9')) //ПижЦЕчЛњзЊЖЏ1-9ШІ
{
if (dirMotor == 0)
{
TrunMotor(360*(keycode-'0'));
}
else
{
TrunMotor(-360*(keycode-'0'));
}
}
else if (keycode == 0x26) //ЯђЩЯМќЃЌПижЦзЊЖЏЗНЯђЮЊе§зЊ
{
dirMotor = 0;
}
else if (keycode == 0x28) //ЯђЯТМќЃЌПижЦзЊЖЏЗНЯђЮЊЗДзЊ
{
dirMotor = 1;
}
else if (keycode == 0x25) //ЯђзѓМќЃЌЙЬЖЈе§зЊ90ЖШ
{
TrunMotor(90);
}
else if (keycode == 0x27) //ЯђгвМќЃЌЙЬЖЈЗДзЊ90ЖШ
{
TrunMotor(-90);
}
else if (keycode == 0x1B) //EscМќЃЌЭЃжЙзЊЖЏ
{
StopMotor();
}
}
void MotorDrive()
{
unsigned char buf;
static unsigned char step = 0; //ЪЙгУОВЬЌБфСПвдБЃДцзЁЧАвЛДЮЕФжЕ
unsigned char code BeatCode[8] = { //ВННјЕчЛњНкХФЖдгІЕНIOПижЦЕчЦНЕФДњТы
0xE, 0xC, 0xD, 0x9, 0xB, 0x3, 0x7, 0x6
};
if (beats != 0)
{
if (beats > 0)
{
step++; //е§зЊЪБВННјНкХФЕнді
step &= 0x07; //гУ“гы”ЗНЪНЪЕЯжЕН8ЙщСу
beats--; //е§зЊЪБНкХФМЦЪ§ЕнМѕ
}
else
{
step--; //ЗДзЊЪБВННјНкХФЕнді
step &= 0x07; //гУ“гы”ЗНЪНЭЌбљПЩвдЪЕЯжЕН-1ЪБЙщ7
beats++; //ЗДзЊЪБНкХФМЦЪ§Енді
}
buf = P1 & 0xF0; //гУbufднДцP1ПкЕФИп4ЮЛЃЌЖјЕЭ4ЮЛЧхСу
buf |= BeatCode[step]; //bufЕЭ4ЮЛИФЮЊЯргІЕФНкХФДњТыжЕ
P1 = buf; //аоИФКѓЭъБЯКѓЕФжЕЫЭЛиЕНP1Пк
}
else
{
P1 |= 0x0F; //НкХФМЦЪ§ЕН0ЪБЙиБеЕчЛњЫљгаЕФЯр
}
}
void KeyScan()
{
unsigned char i;
static unsigned char keyout = 0; //ОиеѓАДМќЩЈУшЪфГіМЦЪ§Цї
static unsigned char keybuf[4][4] = { //АДМќЩЈУшЛКГхЧјЃЌБЃДцвЛЖЮЪБМфФкЕФЩЈУшжЕ
{0xFF, 0xFF, 0xFF, 0xFF},
{0xFF, 0xFF, 0xFF, 0xFF},
{0xFF, 0xFF, 0xFF, 0xFF},
{0xFF, 0xFF, 0xFF, 0xFF}
};
//НЋвЛааЕФ4ИіАДМќжЕвЦШыЛКГхЧј
keybuf[keyout][0] = (keybuf[keyout][0] << 1) | KEY_IN_1;
keybuf[keyout][1] = (keybuf[keyout][1] << 1) | KEY_IN_2;
keybuf[keyout][2] = (keybuf[keyout][2] << 1) | KEY_IN_3;
keybuf[keyout][3] = (keybuf[keyout][3] << 1) | KEY_IN_4;
//ЯћЖЖКѓИќаТАДМќзДЬЌ
for (i=0; i<4; i++) //УПаа4ИіАДМќЃЌЫљвдбЛЗ4ДЮ
{
if ((keybuf[keyout][i] & 0x0F) == 0x00)
{ //СЌај4ДЮЩЈУшжЕЮЊ0ЃЌМД16ms(4*4ms)ФкЖМжЛМьВтЕНАДЯТзДЬЌЪБЃЌПЩШЯЮЊАДМќвбАДЯТ
KeySta[keyout][i] = 0;
}
else if ((keybuf[keyout][i] & 0x0F) == 0x0F)
{ //СЌај4ДЮЩЈУшжЕЮЊ1ЃЌМД16ms(4*4ms)ФкЖМжЛМьВтЕНЕЏЦ№зДЬЌЪБЃЌПЩШЯЮЊАДМќвбЕЏЦ№
KeySta[keyout][i] = 1;
}
}
//жДааЯТвЛДЮЕФЩЈУшЪфГі
keyout++;
keyout &= 0x03;
switch (keyout)
{
case 0:
KEY_OUT_4 = 1;
KEY_OUT_1 = 0;
break;
case 1:
KEY_OUT_1 = 1;
KEY_OUT_2 = 0;
break;
case 2:
KEY_OUT_2 = 1;
KEY_OUT_3 = 0;
break;
case 3:
KEY_OUT_3 = 1;
KEY_OUT_4 = 0;
break;
default:
break;
}
}
void InterruptTimer0() interrupt 1
{
static bit div = 0;
TH0 = 0xFC; //вчГіКѓНјШыжаЖЯжиаТИГжЕЃЌЖЈЪБ1ms
TL0 = 0x67;
KeyScan(); //жДааАДМќЩЈУш
//гУвЛИіОВЬЌbitБфСПЪЕЯжЖўЗжЦЕЃЌМД2msЖЈЪБЃЌгУгкЧ§ЖЏЕчЛњ
div = ~div;
if (div == 1)
{
MotorDrive();
}
}
етИіГЬађЪЧЕкАЫеТКЭБОеТжЊЪЖЕФвЛИізлКЯ——гУАДМќПижЦВННјЕчЛњзЊЖЏЁЃГЬађжагаетУДМИЕужЕЕУзЂвтЃЌЮвУЧЗжЪіШчЯТЃК
1ЁЂеыЖдЕчЛњвЊЭъГЩе§зЊКЭЗДзЊСНИіВЛЭЌЕФВйзїЃЌЮвУЧВЂУЛгаЪЙгУе§зЊЦєЖЏКЏЪ§КЭЗДзЊЦєЖЏКЏЪ§етУДСНИіКЏЪ§РДЭъГЩЃЌвВУЛгадкЦєЖЏКЏЪ§ЖЈвхЕФЪБКђдіМгвЛИіаЮЪНВЮЪ§РДжИУїЦфЗНЯђЁЃЮвУЧетРяЕФЦєЖЏКЏЪ§void TrunMotor(signed long angle)гыЕЅЯђе§зЊЪБЕФЦєЖЏКЏЪ§ЮЈвЛЕФЧјБ№ОЭЪЧАбаЮЪНВЮЪ§angleЕФРраЭДгunsigned longИФЮЊСЫsigned longЃЌЮвУЧгУгаЗћКХЪ§ЙЬгаЕФе§ИКЬиадРДЧјЗже§зЊгыЗДзЊЃЌе§Ъ§БэЪОе§зЊangleЖШЃЌИКЪ§ОЭБэЪОЗДзЊangleЖШЃЌетбљДІРэЪЧВЛЪЧКмМђНргжКмУїСЫФиЃПЖјФуЖдгаЗћКХЪ§КЭЮоЗћКХЪ§ЕФЧјБ№гУЗЈЪЧВЛЪЧвВИќгаЬхЛсСЫЃП
2ЁЂеыЖджежЙЕчЛњзЊЖЏЕФВйзїЃЌЮвУЧЖЈвхСЫвЛИіЕЅЖРЕФStopMotorКЏЪ§РДЭъГЩЃЌОЁЙметИіКЏЪ§ЗЧГЃМђЕЅЃЌОЁЙмЫќвВжЛдкEscАДМќЗжжЇФкБЛЕїгУСЫЃЌЕЋЮвУЧШдШЛАбЫќЕЅЖРЬсГіРДзїЮЊСЫвЛИіКЏЪ§ЁЃЖјетжжзіЗЈОЭЪЧЛљгкетбљвЛЬѕБрГЬддђЃКОЁПЩФмгУЕЅЖРЕФКЏЪ§РДЭъГЩгВМўЕФФГжжВйзїЃЌЕБвЛИігВМўАќКЌЖрИіЕФВйзїЪБЃЌАбетаЉВйзїКЏЪ§зщжЏдквЛЦ№ЃЌаЮГЩвЛИіЖдЩЯВуЕФЭГвЛНгПкЁЃетбљЕФВуДЮЛЏДІРэЃЌЛсЪЙЕУећИіГЬађЬѕРэЧхЮњЃЌМДгаРћгкГЬађЕФЕїЪдЮЌЛЄЃЌгжгаРћгкЙІФмЕФРЉГфЁЃ
3ЁЂжаЖЯКЏЪ§жавЊДІРэАДМќЩЈУшКЭЕчЛњЧ§ЖЏСНМўЪТЧщЃЌЖјЮЊСЫБмУтжаЖЯКЏЪ§Й§гкИДдгЃЌЮвУЧОЭгжЗжГіСЫАДМќЩЈУшКЭЕчЛњЧ§ЖЏСНИіКЏЪ§ЃЈетвВЭЌбљЗћКЯЩЯЪі2ЕФБрГЬддђЃЉЃЌЖјжаЖЯКЏЪ§ЕФТпМОЭБфЕУМђНрЖјЧхЮњСЫЁЃетРяЛЙгаИіУЌЖмЃЌОЭЪЧАДМќЩЈУшЮвУЧбЁдёЕФЖЈЪБЪБМфЪЧ1msЃЌЖјБОеТжЎЧАЕФЪЕР§жаЕчЛњНкХФГжајЪБМфЖМЪЧ2msЃЛКмЯдШЛЃЌгУ1msЕФЖЈЪБПЩвдЖЈГі2msЕФМфИєЃЌЖјгУ2msЕФЖЈЪБШДЕУВЛЕНзМШЗЕФ1msМфИєЃЛЫљвдЮвУЧЕФзіЗЈОЭЪЧЃЌЖЈЪБЦївРШЛЖЈЪБ1msЃЌШЛКѓгУвЛИіbitБфСПзіБъжОЃЌУЛ1msИФБфвЛДЮЫќЕФжЕЃЌЖјЮвУЧжЛбЁдёжЕЮЊ1ЕФЪБКђжДаавЛДЮЖЏзїЃЌетбљОЭЪЧ2msЕФМфИєСЫЃЛШчЙћЮввЊ3msЁЂ4ms……ФиЃЌАбbitИФЮЊcharЛђintаЭЃЌШЛКѓЖдЫќУЧЕндіЃЌХаЖЯЕНФФИіжЕИУЙщСуЃЌОЭПЩвдСЫЃЛетОЭЪЧдкгВМўЖЈЪБЦїЕФЛљДЁЩЯЪЕЯжзМШЗЕФШэМўЖЈЪБЃЌЦфЪЕРрЫЦЕФВйзїЮвУЧдкНВЪ§ТыЙмЕФЪБКђвВгУЙ§СЫЃЌЛиЯывЛЯТАЩЁЃ
1.4 ЗфУљЦїЕФбЇЯА
ЗфУљЦїДгНсЙЙЧјЗжЗжЮЊбЙЕчЪНЗфУљЦїКЭЕчДХЪНЗфУљЦїЁЃбЙЕчЪНЮЊбЙЕчЬеДЩЦЌЗЂвєЃЌЕчСїБШНЯаЁвЛаЉЃЌЕчДХЪНЗфУљЦїЮЊЯпШІЭЈЕче№ЖЏЗЂвєЃЌЬхЛ§БШНЯаЁЁЃ
АДееЧ§ЖЏЗНЪНЗжЮЊгадДЗфУљЦїКЭЮодДЗфУљЦїЁЃетРяЕФгадДКЭЮодДВЛЪЧжИЕчдДЃЌЖјЪЧеёЕДдДЁЃгадДЗфУљЦїФкВПДјСЫеёЕДдДЃЌШчЭМ9-9ЫљЪОжаЃЌИјСЫBUZZв§НХвЛИіЕЭЕчЦНЃЌЗфУљЦїОЭЛсжБНгЯьЁЃЖјЮодДЗфУљЦїФкВПЪЧВЛДјеёЕДдДЕФЃЌвЊШУЫћЯьБиаыИј500HzЕН4.5kHzжЎМфЕФТіГхЦЕТЪаХКХРДЧ§ЖЏЫќВХЛсЯьЁЃгадДЗфУљЦїЭљЭљБШЮодДЗфУљЦїЙѓвЛаЉЃЌвђЮЊРяБпЖрСЫеёЕДЕчТЗЃЌЧ§ЖЏЗЂвєвВМђЕЅЃЌППЕчЦНОЭПЩвдЧ§ЖЏЃЌЖјЮодДЗфУљЦїМлИёБШНЯБувЫЃЌДЫЭтЮодДЗфУљЦїЩљвєЦЕТЪПЩвдПижЦЃЌЖјвєНзгыЦЕТЪгжгаШЗЖЈЕФЖдгІЙиЯЕЃЌвђДЫОЭПЩвдзіГіРД“do re mi fa sol la si”ЕФаЇЙћЃЌПЩвдгУЫќжЦзїГіМђЕЅЕФвєРжЧњФПЃЌБШШчЩњШеИшЁЂСНжЛРЯЛЂЕШЕШЁЃ
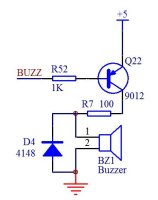
ЭМ9-9 ЗфУљЦїЙЄзїдРэЭМ
ЮвУЧРДПДвЛЯТЭМ9-9ЃЌЗфУљЦїЕчСївРШЛЯрЖдНЯДѓЃЌвђДЫашвЊгУШ§МЋЙмЧ§ЖЏЃЌВЂЧвМгСЫвЛИі100ХЗЕФЕчзшзїЮЊЯоСїЕчзшЁЃДЫЭтЛЙМгСЫвЛИіD4ЖўМЋЙмЃЌетИіЖўМЋЙмНазіајСїЖўМЋЙмЁЃЮвУЧЕФЗфУљЦїЪЧИаадЦїМўЃЌЕБШ§МЋЙмЕМЭЈИјЗфУљЦїЙЉЕчЪБЃЌОЭЛсгаЕМЭЈЕчСїСїЙ§ЗфУљЦїЁЃЖјЮвУЧжЊЕРЃЌЕчИаЕФвЛИіЬиЕуОЭЪЧЕчСїВЛФмЭЛБфЃЌЕМЭЈЪБЕчСїЪЧж№НЅМгДѓЕФЃЌетЕуУЛгаЮЪЬтЃЌЕЋЕБЙиЖЯЪБЃЌО“ЕчдД-Ш§МЋЙм-ЗфУљЦї-Еи”етЬѕЛиТЗОЭНиЖЯСЫЃЌЙ§ВЛСЫШЮКЮЕчСїСЫЃЌФЧУДДЂДцЕФЕчСїЭљФФЖљШЅФиЃЌОЭЪЧОЙ§етИіD4КЭЗфУљЦїздЩэЕФЛЗТЗРДЯћКФЕєСЫЃЌДгЖјОЭБмУтСЫЙиЖЯЪБгЩгкЕчИаЕчСїдьГЩЕФЗДЯђГхЛїЁЃНгајЙиЖЯЪБЕФЕчСїЃЌетОЭЪЧајСїЖўМЋЙмУћГЦЕФгЩРДЁЃ
ЗфУљЦїОГЃгУгкЕчФдЁЂДђгЁЛњЁЂЭђгУБэетаЉЩшБИЩЯзіЬсЪОвєЃЌЬсЪОвєвЛАувВКмМђЕЅЃЌОЭЪЧМђЕЅЗЂГіИіЩљвєОЭааЃЌЮвУЧГЬађМђЕЅзіСЫИі4kHZЦЕТЪЯТЕФЗЂЩљКЭ1kHZЦЕТЪЯТЕФЗЂЩљГЬађЃЌЭЌбЇУЧздМКБШНЯвЛЯТМДПЩЁЃ
#include<reg52.h>
sbit BUZZ = P1^6; //ЗфУљЦїПижЦв§НХ
unsigned char T0LoadH = 0; //T0жидижЕЕФИпзжНк
unsigned char T0LoadL = 0; //T0жидижЕЕФЕЭзжНк
void OpenBuzz(unsigned int frequ);
void StopBuzz();
void main()
{
unsigned int i=0;
TMOD = 0x01; //ХфжУT0ЙЄзїдкФЃЪН1ЃЌднВЛЦєЖЏ
EA = 1; //ЪЙФмШЋОжжаЖЯ
while (1)
{
OpenBuzz(4000); //вд4KHzЕФЦЕТЪЦєЖЏЗфУљЦї
for (i=0; i<40000; i++);
StopBuzz();
for (i=0; i<40000; i++);
OpenBuzz(1000); //вд1KHzЕФЦЕТЪЦєЖЏЗфУљЦї
for (i=0; i<40000; i++);
StopBuzz();
for (i=0; i<40000; i++);
}
}
void OpenBuzz(unsigned int frequ)
{
unsigned int reload;
reload = 65536 - (11059200/12) / (frequ*2); //гЩИјЖЈЦЕТЪжЕМЦЫуЖЈЪБЦїжидижЕ
T0LoadH = reload >> 8; //16ЮЛжидижЕЗжНтЮЊИпЕЭСНИізжНк
T0LoadL = reload;
TH0 = 0xFF; //ЩшЖЈвЛИіНгНќвчГіЕФГѕжЕЃЌвдЪЙЖЈЪБЦїТэЩЯЭЖШыЙЄзї
TL0 = 0xFE;
ET0 = 1; //ЪЙФмT0жаЖЯ
TR0 = 1; //ЦєЖЏT0
}
void StopBuzz()
{
ET0 = 0; //НћгУT0жаЖЯ
TR0 = 0; //ЭЃжЙT0
}
void InterruptTimer0() interrupt 1
{
TH0 = T0LoadH; //вчГіКѓНјШыжаЖЯжиаТИГжЕ
TL0 = T0LoadL;
BUZZ = ~BUZZ; //ЗДзЊЗфУљЦїПижЦЕчЦН
}
СэЭтгУЗфУљЦїРДЪфГівєРжЃЌНіНіЪЧКУЭцЖјвбЃЌгІгУКмЩйЃЌРяБпАќКЌСЫвєНзЁЂРжЦзЕФЯрЙиФкШнЃЌГЬађвВгавЛЕуИДдгЃЌЫљвдОЭВЛЯъЯИИјДѓМвШЅНВНтСЫЁЃЮвНіНіаДСЫИіЁЖСНжЛРЯЛЂЁЗЕФГЬађЃЌДѓМвЯТдиЕНАхзгЩЯЭцЭцЃЌТњзувЛЯТКУЦцаФЁЃ
#include<reg52.h>
//жавє1-7КЭИпвє1-7ЖдгІЦЕТЪСаБэ
unsigned int code NoteFrequ[] = {
523, 587, 659, 698, 784, 880, 988, //жавє1-7
1047, 1175, 1319, 1397, 1568, 1760, 1976 //Ипвє1-7
};
//жавє1-7КЭИпвє1-7ЖдгІЕФЖЈЪБЦїжидижЕ
unsigned int code NoteReload[] = {
65536 - (11059200/12) / (523*2),
65536 - (11059200/12) / (587*2),
65536 - (11059200/12) / (659*2),
65536 - (11059200/12) / (698*2),
65536 - (11059200/12) / (784*2),
65536 - (11059200/12) / (880*2),
65536 - (11059200/12) / (988*2),
65536 - (11059200/12) / (1047*2),
65536 - (11059200/12) / (1175*2),
65536 - (11059200/12) / (1319*2),
65536 - (11059200/12) / (1397*2),
65536 - (11059200/12) / (1568*2),
65536 - (11059200/12) / (1760*2),
65536 - (11059200/12) / (1976*2),
};
sbit BUZZ = P1^6; //ЗфУљЦїПижЦв§НХ
bit enable = 1; //ЗфУљЦїЗЂЩљЪЙФмБъжО
bit tmrflg = 0; //ЖЈЪБЦїжаЖЯЭъГЩБъжО
unsigned char T0LoadH = 0xFF; //T0жидижЕЕФИпзжНк
unsigned char T0LoadL = 0x00; //T0жидижЕЕФЕЭзжНк
void PlayTwoTiger();
void main()
{
unsigned int i=0;
TMOD = 0x01; //ХфжУT0ЙЄзїдкФЃЪН1
TH0 = T0LoadH;
TL0 = T0LoadL;
ET0 = 1; //ЪЙФмT0жаЖЯ
TR0 = 1; //ЦєЖЏT0
EA = 1; //ЪЙФмШЋОжжаЖЯ
while (1)
{
PlayTwoTiger();
for (i=0; i<40000; i++);
}
}
void PlayTwoTiger()
{
unsigned char beat; //МЧТМЕБЧАНкХФЫїв§
unsigned char note; //ЕБЧАНкХФЖдгІЕФвєЗћ
unsigned int time = 0; //ЕБЧАНкХФМЦЪБ
unsigned int beatTime = 0; //ЕБЧАНкХФзмЪБМф
unsigned int soundTime = 0; //ЕБЧАНкХФашЗЂЩљЪБМф
unsigned char code TwoTigerNote[] = { //СНжЛРЯЛЂвєЗћБэ
1, 2, 3, 1, 1, 2, 3, 1, 3, 4, 5, 3, 4, 5,
5,6, 5,4, 3, 1, 5,6, 5,4, 3, 1, 1, 5, 1, 1, 5, 1,
};
unsigned char code TwoTigerBeat[] = { //СНжЛРЯЛЂНкХФБэЃЌ4БэЪОвЛХФЃЌ1ОЭЪЧ1/4ХФЃЌ8ОЭЪЧ2ХФ
4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 8, 4, 4, 8,
3,1, 3,1, 4, 4, 3,1, 3,1, 4, 4, 4, 4, 8, 4, 4, 8,
};
for (beat=0; beatгУНкХФЫїв§зїЮЊбЛЗБфСП
{
while (!tmrflg); //УПДЮЖЈЪБЦїжаЖЯЭъГЩКѓЃЌМьВтВЂДІРэНкХФ
tmrflg = 0;
if (time == 0)
{
//ЦєЖЏвЛИіаТЕФНкХФ
note = TwoTigerNote[beat] - 1;
T0LoadH = NoteReload[note] >> 8;
T0LoadL = NoteReload[note];
beatTime = (TwoTigerBeat[beat] * NoteFrequ[note]) >> 2; //МЦЫуНкХФзмЪБМфЃЌгввЦ2ЮЛЯрЕБгкГ§4ЃЌвЦЮЛДњЬцГ§ЗЈПЩвдМгПьжДааЫйЖШ
soundTime = beatTime - (beatTime >> 2); //МЦЫуЗЂЩљЪБМфЃЌЮЊзмЪБМфЕФ0.75ЃЌвЦЮЛдРэЭЌЩЯ
enable = 1; //жИЪОЗфУљЦїПЊЪМЗЂЩљ
time++;
}
else
{
if (time >= beatTime)
{
time = 0; //ЕБЧАГжајЪБМфЕНДяНкХФзмЪБМфЪБЙщСуЃЌВЂЕндіНкХФЫїв§ЃЌвдзМБИЦєЖЏаТНкХФ
beat++;
}
else
{
time++;
if (time == soundTime)
{
enable = 0; //ЕБЧАГжајЪБМфЕНДяЗЂЩљЪБМфКѓЃЌжИЪОЙиБеЗфУљЦїЃЌвдВхШы0.25*змЪБМфЕФОВвєМфИєЃЌвдЧјЗжСЌајЕФНкХФ
}
}
}
}
}
void InterruptTimer0() interrupt 1
{
TH0 = T0LoadH; //вчГіКѓНјШыжаЖЯжиаТИГжЕ
TL0 = T0LoadL;
tmrflg = 1;
if (enable == 1)
{
BUZZ = ~BUZZ; //ЗДзЊЗфУљЦїПижЦЕчЦН
}
else
{
BUZZ = 1; //ЙиБеЗфУљЦї
}
}
1.5 зївЕ
1ЁЂФмЙЛРэНтЧхГўЕЅЦЌЛњIOПкЕФНсЙЙЁЃ
2ЁЂФмЙЛПДЖЎЩЯЯТРЕчзшЕФЕчТЗгІгУВЂЧвЪьСЗЪЙгУЩЯЯТРЕчзшЁЃ
3ЁЂРэНт28BYJ-48МѕЫйВННјЕчЛњЕФЙЄзїдРэЁЃ
4ЁЂФмЙЛЪьСЗБраДВННјЕчЛње§ЗДзЊШЮвтНЧЖШЕФГЬађЁЃ
5ЁЂбЇЛсЗфУљЦїЗЂЩљЕФЗНЗЈЁЃ
ЩЯвЛПЮ:ЕкАЫеТ ЖРСЂАДМќКЭОиеѓАДМќ
ЯТвЛПЮ: | 



 [ИДжЦСДНг]
[ИДжЦСДНг]

 ЙмРэдБQQ:125739409;ММЪѕНЛСїQQШК281945664
ЙмРэдБQQ:125739409;ММЪѕНЛСїQQШК281945664





 QQКУгбКЭШК
QQКУгбКЭШК QQПеМф
QQПеМф ЬкбЖЮЂВЉ
ЬкбЖЮЂВЉ ЬкбЖХѓгб
ЬкбЖХѓгб ЪеВи
ЪеВи ЬдЬћ
ЬдЬћ ЖЅ
ЖЅ ВШ
ВШ







