|
|
给你一段简单的程序代码,控制步进电机的,不过你要好好看看程序的编写,以适应你的硬件(主要是连线),你可以在实现这个的基础上实现你所说的目标,个人觉得你参考这个程序然后自己实现你所说的功能比较好:
- #include <reg52.h>
- unsigned char code F_Rotation[4]={0x08,0x10,0x20,0x40};//正转表格
- unsigned char code B_Rotation[4]={0x40,0x20,0x10,0x08};//反转表格
- void Delay(unsigned int i)//延时
- {
- while(--i);
- }
- main()
- {
- unsigned char i;
- while(1)
- {
- for(i=0;i<4;i++) //4相
- {
- P1=F_Rotation[i]; //输出对应的相 可以自行换成反转表格
- Delay(500); //改变这个参数可以调整电机转速
- }
- }
- }
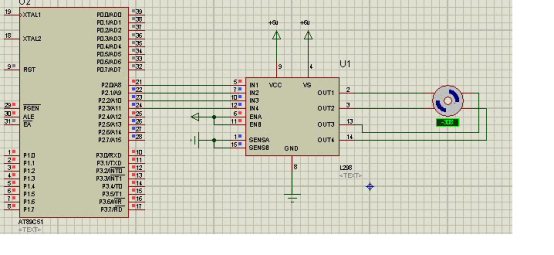
我编了一个程序 ,让单片机发100个脉冲,之后电机就停止转动。但是把单片机、驱动器、电机连起来,运行的时候,步进电机一直转,没有出现预期的停止。我的驱动器的脉冲负接 P1^2,驱动器的脉冲正接+5V。- #include<reg52.h>
- #include <intrins.h>
- #define VALUE 40
- sbit sp = P1^2;
- unsigned int a;
- void delay(unsigned int i)
- {
- char j;
- for(i; i > 0; i--)
- for(j = 200; j > 0; j--);
- }
- void main()
- While(1)
- {
- a=0;
- while(1)
- { sp=0;
- delay(10);
- sp=1;
- delay(10);
- a++;
- if(a==100)
- {
- sp=0
- break;
-
- }
- }
- }
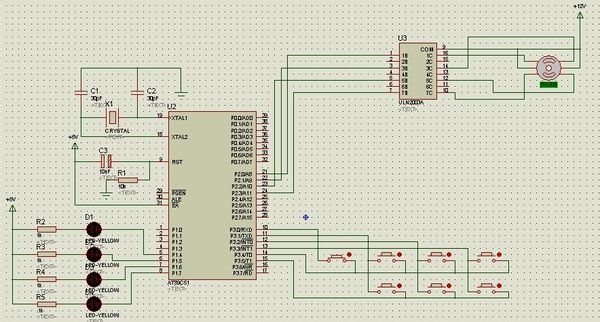
电路图: 程序; - #include <reg52.h>
- #define uint unsigned int
- #define uchar unsigned char
- uchar code s[]={ 0x88,0x22,0x44,0x11 };
- void delay(uint z)
- { uint x,y;
- for(x=z;x>0;x--)
- for(y=110;y>0;y--);
- }
- void main()
- { int i;
- while(1)
- { for(i=0;i<4;i++)
- { P2=s[i];
- delay(200);
- }
- }
- }
-
-
-
-
- #include<reg51.h>
- sbit k1=P1^1; //启动
- sbit k2=P1^0; //正反转
- sbit k3=P1^2; //加速
- sbit k4=P1^3; //减速
- unsigned int x=50000;
- unsigned char i=0;
- unsigned char code table[6]={0x01,0x03,0x02,0x06,0x04,0x05};//单双六拍
- void motor();
- void main()
- {
- TMOD=0x01;
- TH0=-x>>8; //
- TL0=-x%256; //
- TCON=0x10;
- IE=0x82;
- while(1);
- }
- void time_0 () interrupt 1
- {
- EA=0;TR0=0;
- motor();
- if(x<65000&&x>36000) //上下限
- {if(!k3) x=x-2000; //加速
- else if(!k4) x=x+2000;} //减速
- TH0=-x>>8;TL0=-x%256;
- TR0=1;EA=1;
- }
- void motor()
- {
- if(!k1)
- { if(!k2) //正反转
- {i+=1;
- if(i>5) i=0;}
- else
- {i-=1;
- if(i>5) i=5;}
- P2=table;
- }
- else P2=0;
- }
51单片机控制的4相步进电机的C语言程序 - #include <AT89X51.H>
- unsigned char code table[]={0xf1,0xf3,0xf2,0xf6,0xf4,0xfc,0xf8,0xf9,0x00,0xf1,0xf9,0xf8,0xfc,0xf4,0xf6,0xf2,0xf3,0x00};
- unsigned char temp,temp_old;
- unsigned char key;
- unsigned char i,j,k,m,s;
- void delay(int i)
- {
- for(m=i;m>0;m--)
- for(j=250;j>0;j--)
- for(k=10;k>0;k--);
- }
- void saomiao()
- {
- P3=0xff;
- P3_4=0;
- temp=P3;
- temp=temp&0x0f;
- if(temp!=0x0f)
- {
- for(i=50;i>0;i--)
- for(j=200;j>0;j--);
- temp=P3;
- temp=temp&0x0f;
- if(temp!=0x0f)
- {
- temp=P3;
- temp=temp&0x0f;
- switch(temp)
- {
- case 0x0e:
- key=1;
- break;
- case 0x0d:
- key=2;
- break;
- case 0x0b:
- key=3;
- break;
- case 0x07:
- key=4;
- break;
- }
- temp=P3;
- temp=temp&0x0f;
- while(temp!=0x0f)
- {
- temp=P3;
- temp=temp&0x0f;
- }
- }
- }
- P3=0xff;
- P3_5=0;
- temp=P3;
- temp=temp&0x0f;
- if(temp!=0x0f)
- {
- for(i=50;i>0;i--)
- for(j=200;j>0;j--);
- temp=P3;
- temp=temp&0x0f;
- if(temp!=0x0f)
- {
- temp=P3;
- temp=temp&0x0f;
- switch(temp)
- {
- case 0x0d:
- key=5;
- break;
- case 0x0b:
- key=6;
- break;
- case 0x07:
- key=7;
- break;
- }
- temp=P3;
- temp=temp&0x0f;
- while(temp!=0x0f)
- {
- temp=P3;
- temp=temp&0x0f;
- }
-
- }
- }
- }
- void main(void)
- {
- while(1)
- {
- saomiao();
- if(key==1)
- { P1=0;
- P2=0;
- saomiao();
- }
- if(key==2)
- {
- temp_old=key;
- for(s=0;s<8;s++)
- { P2=table[s];
- P1_4=0;
- delay(13);
- saomiao();
- if(key!=temp_old)
- {
- P1_4=1;
- break;
- }
- }
- }
- if(key==3)
- {
- temp_old=key;
- for(s=0;s<8;s++)
- { P2=table[s];
- P1_5=0;
- delay(5);
- saomiao();
- if(key!=temp_old)
- {
- P1_5=1;
- break;
- }
- }
- }
- if(key==4)
- {
- temp_old=key;
- for(s=0;s<8;s++)
- { P2=table[s];
- P1_6=0;
- delay(20);
- saomiao();
- if(key!=temp_old)
- {
- P1_6=1;
- break;
- }
-
- }
- }
- if(key==5)
- {
- temp_old=key;
- for(s=9;s<17;s++)
- { P2=table[s];
- P1_7=0;
- delay(13);
- saomiao();
- if(key!=temp_old)
- {
- P1_7=1;
- break;
- }
- }
- }
- if(key==6)
- {
- temp_old=key;
- for(s=9;s<17;s++)
- { P2=table[s];
- P1_5=0;
- delay(5);
- saomiao();
- if(key!=temp_old)
- {
- P1_5=1;
- break;
- }
- }
- }
- if(key==7)
- {
- temp_old=key;
- for(s=9;s<17;s++)
- { P2=table[s];
- P1_6=0;
- delay(20);
- saomiao();
- if(key!=temp_old)
- {
- P1_6=1;
- break;
- }
- }
- }
- }
- }
 |
|