
在这里介绍一下用51单片机驱动步进电机的方法。
这款步进电机的驱动电压12V,步进角为 7.5度 . 一圈 360 度 , 需要 48 个脉冲完成!!!
该步进电机有6根引线,排列次序如下:1:红色、2:红色、3:橙色、4:棕色、5:黄色、6:黑色。
采用51驱动ULN2003的方法进行驱动。
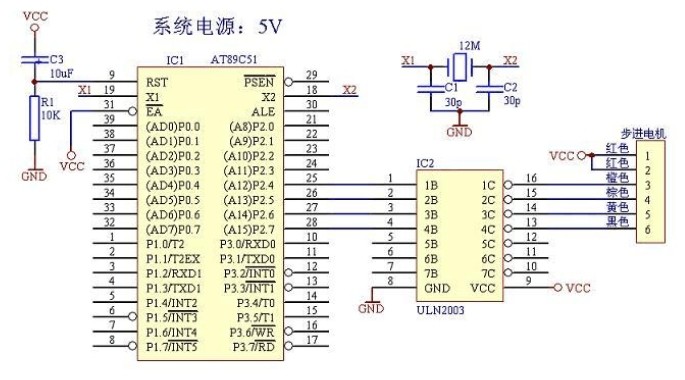
ULN2003的驱动直接用单片机系统的5V电压,可能力矩不是很大,大家可自行加大驱动电压到12V。
;******************************************************************************
;************************* 步进电机的驱动*************************************** ; DESIGN BY BENLADN911 FOSC = 12MHz 2005.05.19
;---------------------------------------------------------------------------------
; 步进电机的驱动信号必须为 脉冲信号!!! 转动的速度和脉冲的频率成正比!!!
; 本步进电机步进角为 7.5度 . 一圈 360 度 , 需要 48 个脉冲完成!!!
;---------------------------------------------------------------------------------
; A组线圈对应 P2.4
; B组线圈对应 P2.5
; C组线圈对应 P2.6
; D组线圈对应 P2.7
; 正转次序: AB组--BC组--CD组--DA组 (即一个脉冲,正转 7.5 度)
;----------------------------------------------------------------------------------
;----------------------------正转-------------------------- ORG 0000H LJMP MAIN ORG 0100H
MAIN:
MOV R3,#144 正转 3 圈共 144 脉冲 START: MOV R0,#00H START1: MOV P2,#00H MOV A,R0
MOV DPTR,#TABLE MOVC A,@A+DPTR
JZ START 对 A 的判断,当 A = 0 时则转到 START MOV P2,A
LCALL DELAY INC R0
DJNZ R3,START1
MOV P2,#00H LCALL DELAY1
;-----------------------------反转------------------------
MOV R3,#144 反转一圈共 144 个脉冲 START2:
MOV P2,#00H MOV R0,#05 START3: MOV A,R0
MOV DPTR,#TABLE MOVC A,@A+DPTR JZ START2 MOV P2,A CALL DELAY INC R0
DJNZ R3,START3 MOV P2,#00H
LCALL DELAY1 LJMP MAIN
DELAY: MOV R7,#40 步进电机的转速 M3: MOV R6,#248 DJNZ R6,$ DJNZ R7,M3
RET
DELAY1: MOV R4,#20 2S 延时子程序 DEL2: MOV R3,#200 DEL3: MOV R2,#250 DJNZ R2,$ DJNZ R3,DEL3 DJNZ R4,DEL2 RET TABLE:
DB 30H,60H,0C0H,90H 正转表 DB 00 正转结束
DB 30H,90H,0C0H,60H 反转表 DB 00 反转结束 END
51单片机控制四相步进电机
拿 到步进电机,根据以前看书对四相步进电机的了解,我对它进行了初步的测试,就是将5伏电源的正端接上最边上两根褐色的线,然后用5伏电源的地线分别和另外 四根线(红、兰、白、橙)依次接触,发现每接触一下,步进电机便转动一个角度,来回五次,电机刚好转一圈,说明此步进电机的步进角度为 360/(4×5)=18度。地线与四线接触的顺序相反,电机的转向也相反。
此步进电机,则只需分别依次给四线一定时间的脉冲电流,电机便可连续转动起来。
通过改变脉冲电流的时间间隔,就可以实现对转速的控制;通过改变给四线脉冲电流的顺序,则可实现对转向的控制。所以,设计了如下电路图:
C51程序代码为: 代码一
#include <AT89X51.h> static unsigned int count; static unsigned int endcount; void delay(); void main(void) {
count = 0; P1_0 = 0; P1_1 = 0; P1_2 = 0; P1_3 = 0;
EA = 1; //允许CPU中断
TMOD = 0x11; //设定时器0和1为16位模式1
ET0 = 1; //定时器0中断允许 TH0 = 0xFC;
TL0 = 0x18; //设定时每隔1ms中断一次 TR0 = 1; //开始计数 startrun: P1_3 = 0; P1_0 = 1; delay();
P1_0 = 0;
P1_1 = 1; delay(); P1_1 = 0; P1_2 = 1; delay(); P1_2 = 0; P1_3 = 1; delay();
goto startrun; }
//定时器0中断处理
void timeint(void) interrupt 1 {
TH0=0xFC;
TL0=0x18; //设定时每隔1ms中断一次 count++; }
void delay()
{
endcount=2; count=0;
do{}while(count<endcount); }
将上面的程序编译,用ISP下载线下载至单片机运行,步进电机便转动起来了,初步告捷!
不过,上面的程序还只是实现了步进电机的初步控制,速度和方向的控制还不够灵活,另外,由于没有利用步进电机内线圈之间的“中间状态”,步进电机的步进角度为18度。所以,我将程序代码改进了一下,如下:
代码二
#include <AT89X51.h> static unsigned int count;
static int step_index;
void delay(unsigned int endcount);
void gorun(bit turn, unsigned int speedlevel); void main(void) {
count = 0;
step_index = 0; P1_0 = 0; P1_1 = 0; P1_2 = 0; P1_3 = 0;
EA = 1; //允许CPU中断
TMOD = 0x11; //设定时器0和1为16位模式1
ET0 = 1; //定时器0中断允许
TH0 = 0xFE;
TL0 = 0x0C; //设定时每隔0.5ms中断一次 TR0 = 1; //开始计数 do{
gorun(1,60); }while(1);
}
//定时器0中断处理
void timeint(void) interrupt 1 {
TH0=0xFE;
TL0=0x0C; //设定时每隔0.5ms中断一次 count++; }
P1_3 = 1; break; case 6:
P1_0 = 0; P1_1 = 0; P1_2 = 0; P1_3 = 1; break; case 7: P1_0 = 1; P1_1 = 0; P1_2 = 0; P1_3 = 1; }
delay(speedlevel); if (turn==0) {
step_index++; if (step_index>7) step_index=0; }
else {
step_index--; if (step_index<0) step_index=7; }
}
改进的代码能实现速度和方向的控制,而且,通过step_index静态全局变量能“记住”步进电机的步进位置,下次调用 gorun()函数时则可直接从上次步进位置继续转动,从而实现精确步进;另外,由于利用了步进电机内线圈之间的“中间状态”,步进角度减小了一半,只为 9度,低速运转也相对稳定一些了。
但是,在代码二中,步进电机的运转控制是在主函数中,如果程序还需执行其它任务,则有可能使步进电机的运转收到影响,另外还有其它方面的不便,总之不是很完美的控制。所以我又将代码再次改进:
代码三
#include <AT89X51.h>
static unsigned int count; //计数
static int step_index; //步进索引数,值为0-7 static bit turn; //步进电机转动方向
static bit stop_flag; //步进电机停止标志
static int speedlevel; //步进电机转速参数,数值越大速度越慢,最小值为1,速度最快 static int spcount; //步进电机转速参数计数
void delay(unsigned int endcount); //延时函数,延时为endcount*0.5毫秒 void gorun(); //步进电机控制步进函数 void main(void) {
count = 0; step_index = 0; spcount = 0; stop_flag = 0; P1_0 = 0; P1_1 = 0; P1_2 = 0; P1_3 = 0;
EA = 1; //允许CPU中断
TMOD = 0x11; //设定时器0和1为16位模式1
ET0 = 1; //定时器0中断允许 TH0 = 0xFE;
TL0 = 0x0C; //设定时每隔0.5ms中断一次 TR0 = 1; //开始计数 turn = 0; speedlevel = 2; delay(10000); speedlevel = 1; do{
speedlevel = 2; delay(10000); speedlevel = 1; delay(10000); stop_flag=1; delay(10000); stop_flag=0; }while(1); }
//定时器0中断处理
void timeint(void) interrupt 1 {
TH0=0xFE;
TL0=0x0C; //设定时每隔0.5ms中断一次 count++; spcount--; if(spcount<=0)
{
spcount = speedlevel; gorun(); } }
void delay(unsigned int endcount) {
count=0;
do{}while(count<endcount); }
void gorun()
{ if (stop_flag==1) {
P1_0 = 0; P1_1 = 0; P1_2 = 0; P1_3 = 0; return;
}
switch(step_index) {
case 0: //0 P1_0 = 1; P1_1 = 0; P1_2 = 0; P1_3 = 0; break;
case 1: //0、1 P1_0 = 1; P1_1 = 1; P1_2 = 0; P1_3 = 0; break; case 2: //1 P1_0 = 0; P1_1 = 1; P1_2 = 0; P1_3 = 0; break;
case 3: //1、2 P1_0 = 0;
P1_1 = 1; P1_2 = 1; P1_3 = 0; break; case 4: //2 P1_0 = 0; P1_1 = 0; P1_2 = 1; P1_3 = 0; break;
case 5: //2、3 P1_0 = 0; P1_1 = 0; P1_2 = 1; P1_3 = 1; break; case 6: //3 P1_0 = 0; P1_1 = 0; P1_2 = 0; P1_3 = 1; break;
case 7: //3、0 P1_0 = 1; P1_1 = 0; P1_2 = 0; P1_3 = 1; }
if (turn==0) {
step_index++; if (step_index>7) step_index=0; } else {
step_index--; if (step_index<0) step_index=7; }
}
在代码三中,我将步进电机的运转控制放在时间中断函数之中,这样主函数就能很方便的加入其它任务的执行,而对步进电机的运转不产生影响。在此代码中,不但实现了步进电机的转速和转向的控制,另外还加了一个停止的功能,呵呵,这肯定是需要的。
步进电机从静止到高速转动需要一个加速的过程,否则电机很容易被“卡住”,代码一、二实现加速不是很方便,而在代码三中,加速则很容易了。在此代码中,当 转速参数speedlevel 为2时,可以算出,此时步进电机的转速为1500RPM,而当转速参数speedlevel 1时,转速为3000RPM。当步进电机停止,如果直接将speedlevel 设为1,此时步进电机将被“卡住”,而如果先把speedlevel 设为2,让电机以1500RPM的转速转起来,几秒种后,再把speedlevel 设为1,此时电机就能以3000RPM的转速高速转动,这就是“加速”的效果。
在此电路中,考虑到电流的缘故,我用的NPN三极管是S8050,它的电流最大可达1500mA,而在实际运转中,我用万用表测了一下,当转速为 1500RPM时,步进电机的电流只有90mA左右,电机发热量较小,当转速为60RPM时,步进电机的电流为200mA左右,电机发热量较大,所以 NPN三极管也可以选用9013,对于电机发热量大的问题,可加一个10欧到20欧的限流电阻,不过这样步进电机的功率将会变小。