
PIC定时器也用是蛮多的,据说网上还有计算初值的强力软件,不过我还是手动算下吧。总结了下————2013.8.27
PIC单片机定时器初值计算方法
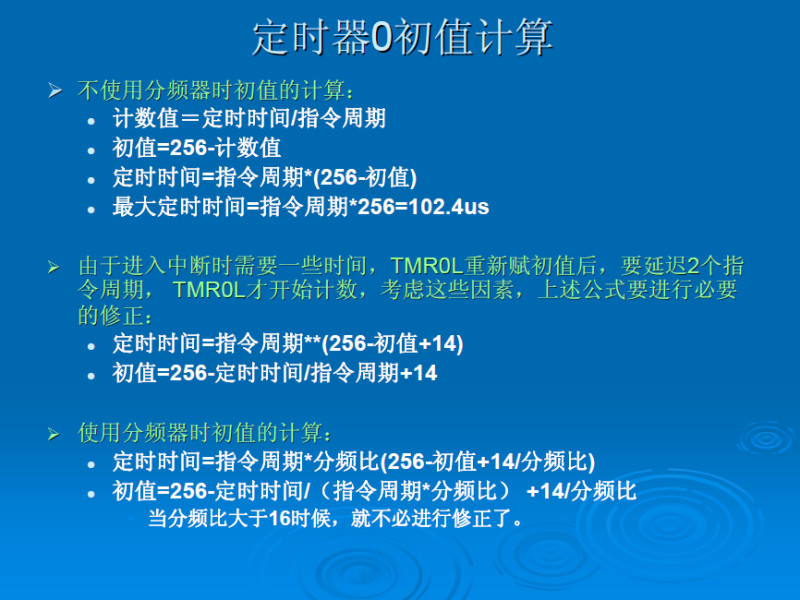
PIC的指令周期是4个震荡周期,在没有使用分频器的情况下,TMR0 会在每个指令周期信号(等于晶体振荡器产生的主时钟周期的 4 倍)到来时自动加 1。在配置了分频器的情况下,TMR0 会在每次收到由分频器将指令周期信号分频一个固定倍数后产生的信号时自动加 1。如果 TMR0在累加计数的过程中,CPU 执行一条往 TMR0 中写入数据的指令,则累加计数器的加 1 操作将被推迟两个指令周期,重新开始计数。这两个指令周期的偏差在用户编写时间精度要求较高的程序时应引起注意,可以通过在每次写入 TMR0 时给一个调整值的方法来解决。
假设的是时钟频率为 4MHz。因此,一个指令周期就是一个微秒(μs)的时间。
,也就是计数一次时间是1us。
没有分频比定时器的初值计算公式:T0=256-Tc+2
其中TC是想得到的次数。加2的原因是写值的时候要消耗两个指令周期。
如果分频器给了定时器,最好不要再读写TMR0了,不然会照成误差。
假设分频器是16,晶振是4Mhz,一次由00到FF的时间是16*256=4096us。假设50ms的时间
在中断每次加上4096,
主程序检查是不是超过5000,超过了就减掉5000,这样算是50ms就得到了。
1:8
再来张图,就更加一目了然了,有木有?哈哈。
EG:
晶振8M 需定时25us 分频比1:2
初值(EE)=256 - 25/ (4/8*2) + 14/2 = 256- 25 + 7 = 238
PS:
简述时钟周期、机器周期、指令周期的概念及三者之间的关系
时钟周期
时钟周期也称为振荡周期,定义为时钟脉冲的倒数(可以这样来理解,时钟周期就是单片机外接晶振的倒数,例如12M的晶振,它的时间周期就是1/12 us),是计算机中最基本的、最小的时间单位。
在一个时钟周期内,CPU仅完成一个最基本的动作。对于某种单片机,若采用了1MHZ的时钟频率,则时钟周期为1us;若采用4MHZ的时钟频率,则时钟周期为250us。由于时钟脉冲是计算机的基本工作脉冲,它控制着计算机的工作节奏(使计算机的每一步都统一到它的步调上来)。显然,对同一种机型的计算机,时钟频率越高,计算机的工作速度就越快。但是,由于不同的计算机硬件电路和器件的不完全相同,所以其所需要的时钟周频率范围也不一定相同。我们学习的8051单片机的时钟范围是1.2MHz-12MHz。
在8051单片机中把一个时钟周期定义为一个节拍(用P表示),二个节拍定义为一个状态周期(用S表示)。
机器周期
在计算机中,为了便于管理,常把一条指令的执行过程划分为若干个阶段,每一阶段完成一项工作。例如,取指令、存储器读、存储器写等,这每一项工作称为一个基本操作。完成一个基本操作所需要的时间称为机器周期。一般情况下,一个机器周期由若干个S周期(状态周期)组成。8051系列单片机的一个机器周期同6个S周期(状态周期)组成。前面已说过一个时钟周期定义为一个节拍(用P表示),二个节拍定义为一个状态周期(用S表示),8051单片机的机器周期由6个状态周期组成,也就是说一个机器周期=6个状态周期=12个时钟周期。
指令周期
指令周期是执行一条指令所需要的时间,一般由若干个机器周期组成。指令不同,所需的机器周期数也不同。对于一些简单的的单字节指令,在取指令周期中,指令取出到指令寄存器后,立即译码执行,不再需要其它的机器周期。对于一些比较复杂的指令,例如转移指令、乘法指令,则需要两个或者两个以上的机器周期。
通常含一个机器周期的指令称为单周期指令,包含两个机器周期的指令称为双周期指令。