|
|
本帖最后由 dzdiy 于 2015-4-11 20:33 编辑
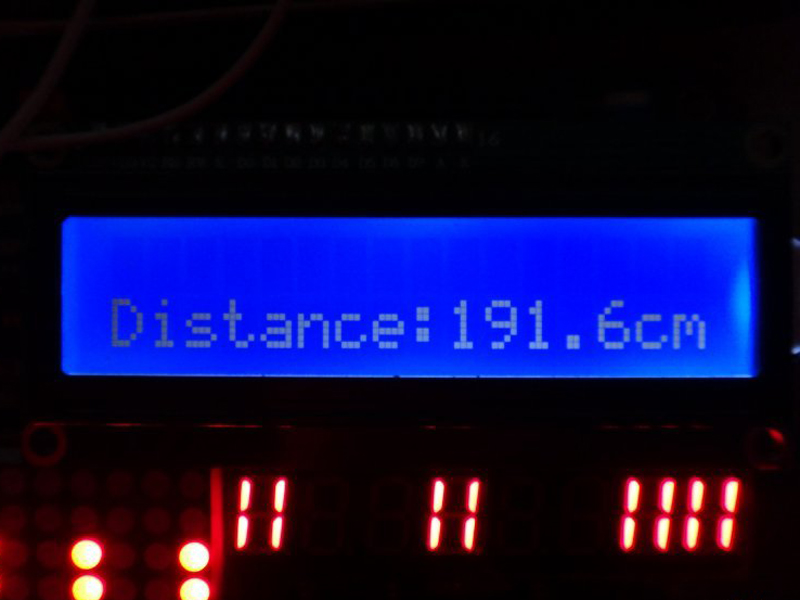
就是这个超声波测距,我有元件,只是不齐全,所以就买了一个测距模块,制作了一个超声波测距板。一切都用洞洞板焊,自己搭建电路,那样学得到更多东西,用套件的话,学到的只是编程,硬件原理就会有空缺。自己自学单片机也有一段时间了,看来还是要检测一下自己的能力才行,想来想去,觉得小车很不错,如果我可以一独立制作出自己的小车,哪是一件不错的事,所以从今天起,我开始制作和编写自己的小车,还是一步一步来哈。超声波测距只是第一步。下载超声波测距程序包
超声波测距源程序:
 超声波测距模块程序包.zip
(28.17 KB, 下载次数: 31)
超声波测距模块程序包.zip
(28.17 KB, 下载次数: 31)
|
|