|
|
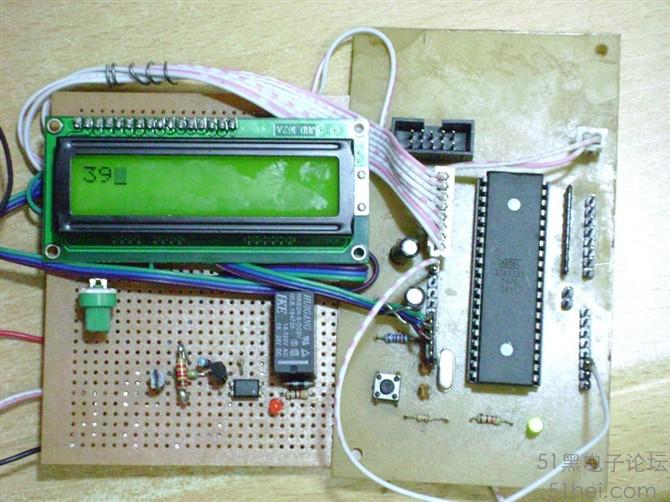
下图为图片:具体说明看前一篇的,这是用1602来显示的,程序是修改前面几个实验的,当温度<40度时电风扇不转,当>=40度时电风扇转动.下面实验做的截图,为参加电子比赛做的单片机系统实验.


全部程序:
- ORG 0000H
- ;单片机内存分配申明!
- TEMPER_L EQU 29H;用于保存读出温度的低8位
- TEMPER_H EQU 28H;用于保存读出温度的高8位
- FLAG1 EQU 38H;是否检测到DS18B20标志位
- a_bit equ 20h ;数码管个位数存放内存位置
- b_bit equ 21h ;数码管十位数存放内存位置
- RS EQU P3.7;确定具体硬件的连接方式
- RW EQU P3.6 ;确定具体硬件的连接方式
- E EQU P3.5 ;确定具体硬件的连接方式
- ;主程序
- MAIN:
- LCALL GET_TEMPER;调用读温度子程序
- MOV A,29H
- MOV C,40H;将28H中的最低位移入C
- RRC A
- MOV C,41H
- RRC A
- MOV C,42H
- RRC A
- MOV C,43H
- RRC A
- MOV 29H,A
- clr c
- setb p3.0;zhelikais从这里开始是我填加的温度控制
- CJNE A,#28H,FIT
- SETB P3.0
- AJMP DISLED
- FIT:CPL C
- MOV P3.0,C;jiesu到这里结束
- DISLED:LCALL DISPLAY;调用数码管显示子程序
- AJMP MAIN
- ;DS18B20复位初始化子程序
- INIT_1820:SETB P2.2
- NOP
- CLR P2.2;主机发出延时537微秒的复位低脉冲
- MOV R1,#3
- TSR1:MOV R0,#107
- DJNZ R0,$
- DJNZ R1,TSR1
- SETB P2.2;然后拉高数据线
- NOP
- NOP
- NOP
- MOV R0,#25H
- TSR2:JNB P2.2,TSR3;等待DS18B20回应
- DJNZ R0,TSR2
- LJMP TSR4 ; 延时
- TSR3:SETB FLAG1 ; 置标志位,表示DS1820存在
- CLR P1.7;检查到DS18B20就点亮P1.7LED,与传感器通信成功
- LJMP TSR5
- TSR4:CLR FLAG1 ; 清标志位,表示DS1820不存在
- CLR P1.1;未检查到DS18B20就点亮P1.1LED,与传感器通信失败
- LJMP TSR7
- TSR5:MOV R0,#117
- TSR6:DJNZ R0,TSR6 ; 时序要求延时一段时间
- TSR7:SETB P2.2
- RET
- ;读出转换后的温度值的子程序
- GET_TEMPER:SETB P2.2
- LCALL INIT_1820;先复位DS18B20
- JB FLAG1,TSS2
- CLR P1.2
- RET ; 判断DS1820是否存在?若DS18B20不存在则返回
- TSS2:CLR P1.3;DS18B20已经被检测到!
- MOV A,#0CCH ; 跳过ROM匹配
- LCALL WRITE_1820
- MOV A,#44H ; 发出温度转换命令
- LCALL WRITE_1820
- LCALL DISPLAY;这里通过调用显示子程序实现延时一段时间,等待AD转换结束,12位的话750微秒
- LCALL INIT_1820;准备读温度前先复位
- MOV A,#0CCH ; 跳过ROM匹配
- LCALL WRITE_1820
- MOV A,#0BEH ; 发出读温度命令
- LCALL WRITE_1820
- LCALL READ_18200; 将读出的温度数据保存到35H/36H
- CLR P1.4
- RET
- ;写DS18B20的子程序(有具体的时序要求)
- WRITE_1820:MOV R2,#8;一共8位数据
- CLR C
- WR1:CLR P2.2
- MOV R3,#6
- DJNZ R3,$
- RRC A
- MOV P2.2,C
- MOV R3,#23
- DJNZ R3,$
- SETB P2.2
- NOP
- DJNZ R2,WR1
- SETB P2.2
- RET
- ; 读DS18B20的程序,从DS18B20中读出两个字节的温度数据
- READ_18200:MOV R4,#2 ; 将温度高位和低位从DS18B20中读出
- MOV R1,#29H ; 低位存入29H(TEMPER_L),高位存入28H(TEMPER_H)
- RE00:MOV R2,#8;数据一共有8位
- RE01:CLR C
- SETB P2.2
- NOP
- NOP
- CLR P2.2
- NOP
- NOP
- NOP
- SETB P2.2
- MOV R3,#9
- RE10:DJNZ R3,RE10
- MOV C,P2.2
- MOV R3,#23
- RE20:DJNZ R3,RE20
- RRC A
- DJNZ R2,RE01
- MOV @R1,A
- DEC R1
- DJNZ R4,RE00
- RET
- ;显示子程序
- display: acall DL100MS
- acall DL100MS
- mov a,29H;将29H中的十六进制数转换成10进制
- mov b,#10 ;10进制/10=10进制
- div ab
- mov b_bit,a ;十位在a
- mov a_bit,b ;个位在b
- add a,#00110000b
- mov b_bit,a
- mov a,b
- add a,#00110000b
- mov a_bit,a
- MOV P1,#00000001B; ;清屏并光标复位
- ACALL ENABLE;调用写入命令子程序
- MOV P1,#00111000B ;;设置显示模式:8位2行5x7点阵
- ACALL ENABLE ;调用写入命令子程序
- MOV P1,#00001111B ;;显示器开、光标开、光标允许闪烁
- ACALL ENABLE ;调用写入命令子程序
- MOV P1,#00000110B ;;文字不动,光标自动右移
- ACALL ENABLE ;调用写入命令子程序
- MOV P1,#80H ;;写入显示起始地址(第二行第一个位置)
- ACALL ENABLE ;调用写入命令子程序
- MOV P1,b_bit ;;A十位送出去
- SETB RS; ;RS=1
- CLR RW; ;RW=0 ;准备写入数据
- CLR E; ;E=0 ;执行显示命令
- ACALL DELAY ;判断液晶模块是否忙?
- SETB E ;;E=1 ;显示完成,程序停车
- MOV P1,#00000110B ;;文字不动,光标自动右移
- ACALL ENABLE ;调用写入命令子程序
- MOV P1,#81H ;;写入显示起始地址(第二行第2个位置)
- ACALL ENABLE ;调用写入命令子程序
- MOV P1,a_bit;;字母A的代码
- SETB RS; ;RS=1
- CLR RW; ;RW=0 ;准备写入数据
- CLR E; ;E=0 ;执行显示命令
- ACALL DELAY ;判断液晶模块是否忙?
- SETB E ;;E=1 ;显示完成,程序停车
- ret
- ENABLE:
- CLR RS; ;写入控制命令的子程序
- CLR RW
- CLR E
- ACALL DELAY
- SETB E
- RET
- DELAY:
- MOV P1,#0FFH ;;判断液晶显示器是否忙的子程序
- CLR RS
- SETB RW
- CLR E
- NOP
- SETB E
- JB P1.7,DELAY; ;如果P1.7为高电平表示忙就循环等待
- RET
- DL100MS: MOV R7,#02H
- DL1: MOV R6,#0C8H
- DL2: MOV R5,#0FAH
- DJNZ R5,$
- DJNZ R6,DL2
- DJNZ R7,DL1
- RET
- end
|
|







