一主机三从机的SPI通信 程序如下:主机://ICC-AVR application builder : 2012-1-13 18:56:57 // Target : M16 // Crystal: 8.0000Mhz // 完整程序下载: http://www.51hei.com/f/djhltl.rar #include <iom16v.h> #include <macros.h> #define Load_High PORTB|=(1<<4) #define Load_Low PORTB&=~(1<<4) unsigned char tab[]={0x00,0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};//流水灯数组 /*----------------------------------------------------------------- 函数名称: void SPImasterInit(void) 函数功能: SPI初始化为主机 参 数: 返 回 值: 无 SPI控制寄存器介绍 SPIE SPE DORD MSTR CPOL CPHA SPR1 SPR0 SPIE:中断使能 SPE :SPI使能 DORD:数据次序 1为LSB首先发送,0为MSB首先发送 MSTR:主从选择 1为主,0为从MSTR置位时选择主机模式,否则为从机.如果MSTR为"1", SS配置为输入,且被拉低,则MSTR 被清零,寄存器SPSR 的SPIF 置位.用户必须重新 设置MSTR 进入主机模式。 CPOL: 时钟极性见ATMEGA16L(中文)P130 CPHA: 时钟相位 SPR1, SPR0: SPI 时钟速率选择1 与0 SPR1 和SPR0 对从机没有影响。 -----------------------------------------------------------------*/ void SPImasterInit(void) //SPI初始化 { DDRB|=(1<<7)|(1<<5)|(1<<4); //设置SCK,MOSI为输出,其他为输入 SPCR|=(1<<SPE)|(1<<MSTR)|(1<<SPR1)|(1<<SPR0);//使能SPI,主模式,Fck/128 } /*----------------------------------------------------------------- 函数名称: void SPIMasterTransmit(uchar TranData) 函数功能: SPI数据传输 参 数: 返 回 值: 无 -----------------------------------------------------------------*/ void SPIMasterTransmit(unsigned char TranData) { SPDR=TranData; //数据放入SPI寄存器中 while(!(SPSR&(1<<SPIF))); //等待数据传输完毕 } void delay(unsigned int ms) { unsigned int i,j; for(i=0;i<ms;i++) { for(j=0;j<1141;j++); } } /*----------------------------------------------------------------- 函数名称: void Transmit(unsigned char i) 函数功能: 封装传输函数 参 数: 返 回 值: 无 -----------------------------------------------------------------*/ void Transmit(unsigned char i) { Load_Low; //等待数据传输,主机向SPDR中写入数据前要将SS拉低 SPIMasterTransmit(i); //传输数据 Load_High; //数据传输完毕,ss恢复高电平 } void main() { unsigned char i=0; DDRC=0XFF; SPImasterInit(); //SPI初始化 while(1) { i++; if(i>8) { i=0; } Transmit(tab[i]);//发送数据 PORTC=SPDR;//主机接收从机的数据产生动作 delay(100); } } 从机:#include<iom16v.h> #include<macros.h> //#include<delay.h> #define uchar unsigned char #define uint unsigned int void delay(uint ms) { uint i,j; for(i=0;i<ms;i++) { for(j=0;j<1141;j++); } } void spi_init(void) { SPCR|=(1<<SPE)|(0<<MSTR)|(1<<SPR1)|(1<<SPR0);//使能SPI,从机模式,Fck/128 DDRB|=(1<<PB6); } char SPI_SlaveReceive(void) { /*等待接收结束*/ while(!(SPSR&(1<<SPIF))); /*返回数据*/ return SPDR; } void main() { char a; spi_init(); DDRC=0XFF; //DDRB=0X00; //PORTC=0XFF; while(1) { PORTC=SPI_SlaveReceive();//从机接收主机的数据做出动作 SPDR=PORTC;//从机向主机传输数据 //delay(100); } }

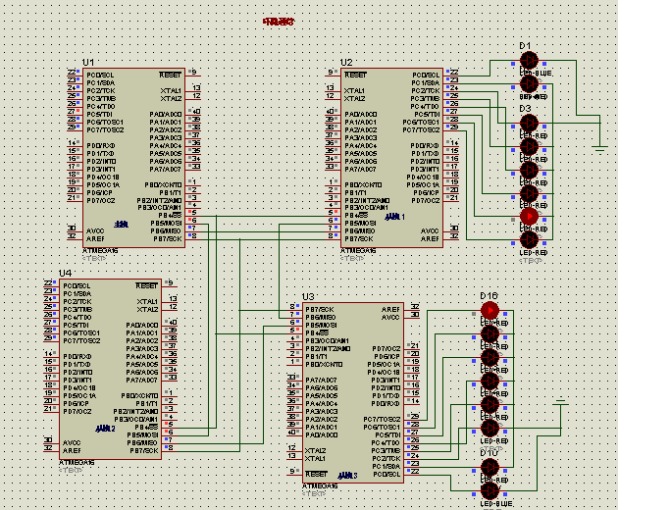
基于AVR单片机的SPI多机环路通信
【关闭窗口】