
#include "msp430G2553.h"
int tab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
int temp;
//КСУыбгГйКЏЪ§
void delay(int ms)
{
int i;
while(ms--)
for(i=0;i<120;i++);
}
//ФЩУзбгГйКЏЪ§
void delayns(int ns)
{
while(ns--);
}
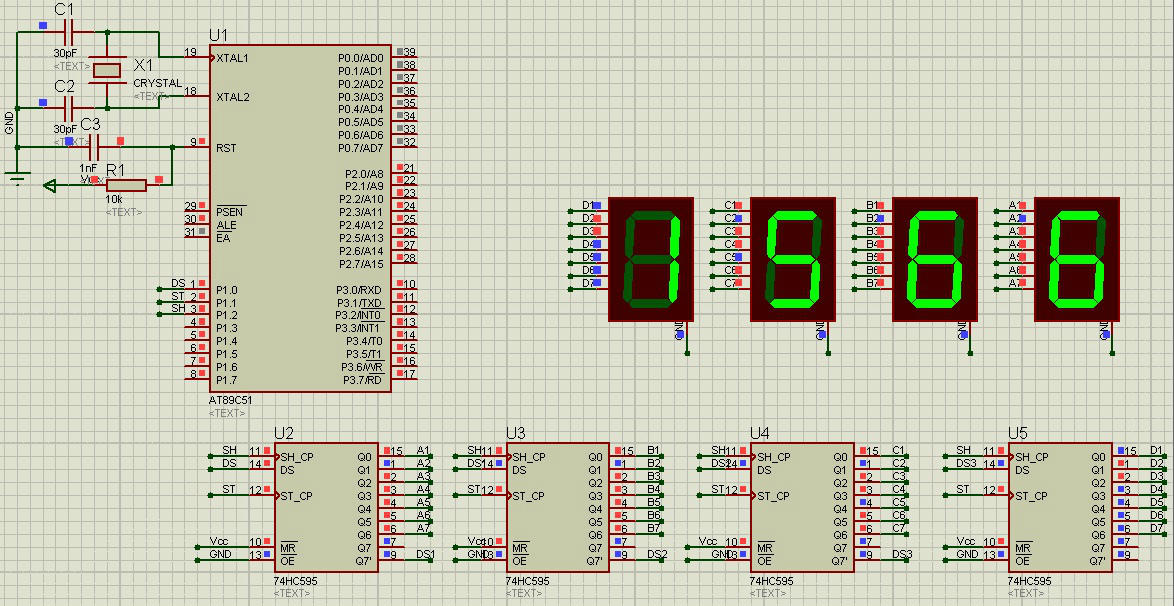
void display(temp)//ЯжЪЕЮЛжУP2.0=SH;P2.1=ST;P2,2=DS
{
int k,temp1,temp2;
for(k=7;k>=0;k--)
{
temp1=1<<k;
temp2=temp & temp1;
if(temp2==temp1)
{
P2OUT |=BIT2;
}
else
{
P2OUT &=~BIT2;
}
P2OUT &=~BIT0;
delayns(10);
P2OUT |=BIT0;
}
P2OUT &=~BIT1;
delayns(10);
P2OUT |=BIT1;
}
int main( void )
{
// Stop watchdog timer to prevent time out reset
WDTCTL = WDTPW + WDTHOLD;
P2DIR |=0x07;
int m,time,temp;
while(1)
{
m=P1IN;
//ЯдЪО
temp=tab[(2*m)%10];//ИіЮЛ
display(temp);
temp=tab[(2*m)/10];//ЪЎЮЛ
display(temp);
//ТіПэ
if(m<=9) time +=10;
if(m>15) time -=30;
P2OUT |=BIT3;
delay(time);
P2OUT &=~BIT3;
delay(20);
}
}
#include"reg51.h"
int tab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
int temp;
//КСУыбгГйКЏЪ§
void delay(int ms)
{
int i;
while(ms--)
for(i=0;i<120;i++);
}
//ФЩУзбгГйКЏЪ§
void delayns(int ns)
{
while(ns--);
}
void display(temp)//ЯжЪЕЮЛжУP2.0=SH;P2.1=ST;P2,2=DS
{
int k,temp1,temp2;
for(k=7;k>=0;k--)
{
temp1=1<<k;
temp2=temp & temp1;
if(temp2==temp1)
{
P2OUT |=BIT2;
}
else
{
P2OUT &=~BIT2;
}
P2OUT &=~BIT0;
delayns(10);
P2OUT |=BIT0;
}
P2OUT &=~BIT1;
delayns(10);
P2OUT |=BIT1;
}
int main( void )
{
// Stop watchdog timer to prevent time out reset
WDTCTL = WDTPW + WDTHOLD;
P2DIR |=0x07;
int m,time,temp;
while(1)
{
m=P1IN;
//ЯдЪО
temp=tab[(2*m)%10];//ИіЮЛ
display(temp);
temp=tab[(2*m)/10];//ЪЎЮЛ
display(temp);
//ТіПэ
if(m<=9) time +=10;
if(m>15) time -=30;
P2OUT |=BIT3;
delay(time);
P2OUT &=~BIT3;
delay(20);
}
}
#include"reg51.h"
sbit DS_595= P1^0;
sbit CT_595= P1^1;
sbit CH_595= P1^2;
int tab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
int temp;
void delay(int ms)
{
int i;
while(ms--)
for(i=0;i<120;i++);
}
void delayns(int ns)
{
while(ns--);
}
void WR_595(void)
{
int k,temp1,temp2;
for(k=7;k>=0;k--)
{
temp1=1<<k;
temp2=temp & temp1;
if(temp2==temp1)
{
DS_595=1;
}
else
{
DS_595=0;
}
CH_595=0;
delayns(10);
CH_595=1;
}
}
void main()
{
int m;
for(m=0;m<10000;m++)
{
temp=tab[m/1000];
WR_595();
CT_595=0;
delayns(10);
CT_595=1;
temp=tab[(m%1000)/100];
WR_595();
CT_595=0;
delayns(10);
CT_595=1;
temp=tab[((m%1000)%100)/10];
WR_595();
CT_595=0;
delayns(10);
CT_595=1;
temp=tab[((m%1000)%100)%10];
WR_595();
CT_595=0;
delayns(10);
CT_595=1;
delay(200);
}
}
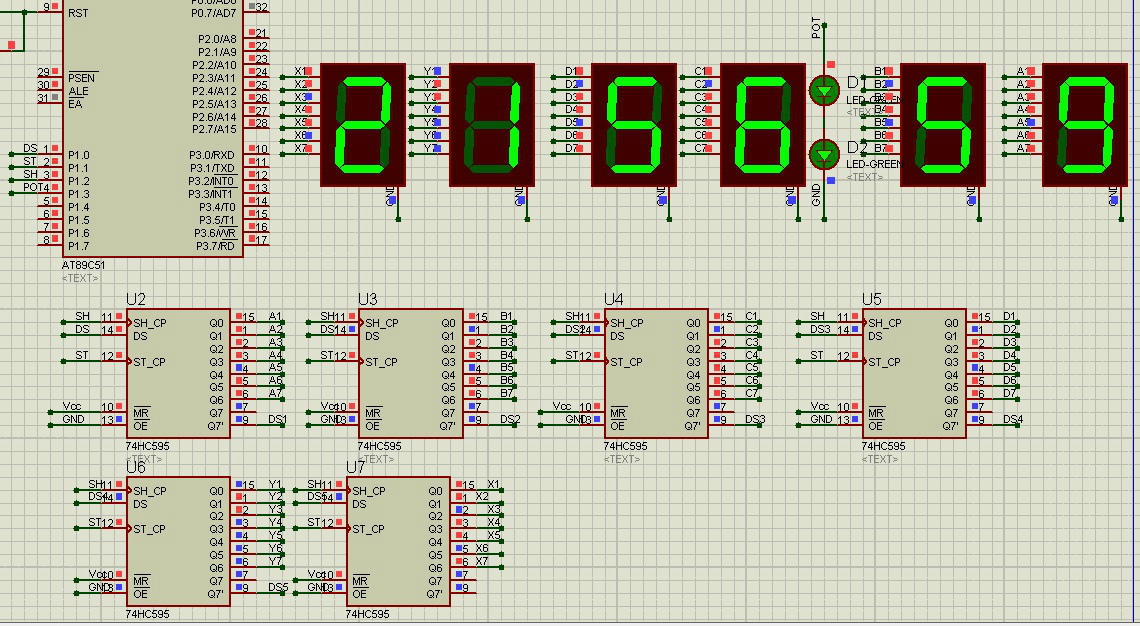
ДЎааЭЈаХЪБжгГЬађ
ДЎааЭЈаХЪБжгГЬађ
#include"reg51.h"
sbit DS_595= P1^0;
sbit CT_595= P1^1;
sbit CH_595= P1^2;
sbit POT =P1^3;
int tab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
int temp;
void delay(int ms)
{
int i;
while(ms--)
for(i=0;i<120;i++);
}
void delayns(int ns)
{
while(ns--);
}
void WR_595(void)
{
int k,temp1,temp2;
for(k=7;k>=0;k--)
{
temp1=1<<k;
temp2=temp & temp1;
if(temp2==temp1)
{
DS_595=1;
}
else
{
DS_595=0;
}
CH_595=0;
delayns(10);
CH_595=1;
}
}
void main()
{
int hour,min,sec;
while(1)
{
sec++;
if(sec==60)
{
sec=0;
min++;
if(min==60)
{
min=0;hour++;
if(hour==24)hour=0;
}
}
temp=tab[hour/10];
WR_595();
CT_595=0;
delayns(2);
CT_595=1;
temp=tab[hour%10];//245959
WR_595();
CT_595=0;
delayns(2);
CT_595=1;
temp=tab[min/10];//5900
WR_595();
CT_595=0;
delayns(2);
CT_595=1;
temp=tab[min%10];
WR_595();
CT_595=0;
delayns(2);
CT_595=1;
temp=tab[sec/10];
WR_595();
CT_595=0;
delayns(2);
CT_595=1;
temp=tab[sec%10];
WR_595();
CT_595=0;
delayns(2);
CT_595=1;
delay(300);
POT=~POT;
delay(300);
POT=~POT;
}
74HC595аОЦЌЪЧвЛжжДЎШыВЂГіЕФаОЦЌ,дкЕчзгЯдЪОЦСжЦзїЕБжагаЙуЗКЕФгІгУЁЃ
74HC595ЪЧ8ЮЛДЎааЪфШы/ЪфГіЛђепВЂааЪфГівЦЮЛМФДцЦїЃЌОпгаИпзшЁЂЙиЁЂЖЯзДЬЌЁЃ
Ш§ЬЌЁЃЬиЕу 8ЮЛДЎааЪфШы 8ЮЛДЎааЛђВЂааЪфГі ДцДЂзДЬЌМФДцЦїЃЌШ§жжзДЬЌ ЪфГіМФДцЦїПЩвджБНгЧхГ§ 100MHzЕФвЦЮЛЦЕТЪ ЪфГіФмСІ ВЂааЪфГіЃЌзмЯпЧ§ЖЏ ДЎааЪфГіЃЛ
БъзМ жаЕШЙцФЃМЏГЩЕчТЗгІгУ ДЎааЕНВЂааЕФЪ§ОнзЊЛЛ Remote control holding register. УшЪі 595ЪЧИцЫпЕФЙшНсЙЙЕФCMOSЦїМўЃЌ МцШнЕЭЕчбЙTTLЕчТЗЃЌзёЪиJEDECБъзМЁЃ
595ЪЧОпга8ЮЛвЦЮЛМФДцЦїКЭвЛИіДцДЂЦїЃЌШ§ЬЌЪфГіЙІФмЁЃ вЦЮЛМФДцЦїКЭДцДЂЦїЪЧЗжБ№ЕФЪБжгЁЃЪ§ОндкSCHcpЕФЩЯЩ§биЪфШыЃЌдкSTcpЕФЩЯЩ§биНјШыЕФДцДЂМФДцЦїжаШЅЁЃШчЙћСНИіЪБжгСЌдквЛЦ№ЃЌдђвЦЮЛМФДцЦїзмЪЧБШДцДЂМФДцЦїдчвЛИіТіГхЁЃ вЦЮЛМФДцЦїгавЛИіДЎаавЦЮЛЪфШыЃЈDsЃЉЃЌКЭвЛИіДЎааЪфГіЃЈQ7’ЃЉ,КЭвЛИівьВНЕФЕЭЕчЦНИДЮЛЃЌДцДЂМФДцЦїгавЛИіВЂаа8ЮЛЕФЃЌОпБИШ§ЬЌЕФзмЯпЪфГіЃЌЕБЪЙФмOEЪБЃЈЮЊЕЭЕчЦНЃЉЃЌДцДЂМФДцЦїЕФЪ§ОнЪфГіЕНзмЯпЁЃ
CPDОіЖЈЖЏЬЌЕФФмКФЃЌ PDЃНCPD×VCC×f1+∑(CL×VCC2×f0) F1ЃНЪфШыЦЕТЪЃЌCLЃНЪфГіЕчШн f0ЃНЪфГіЦЕТЪЃЈMHzЃЉ Vcc=ЕчдДЕчбЙ в§НХЫЕУїЗћКХв§НХУшЪі
ФкВПНсЙЙ
НсКЯв§НХЫЕУїОЭФмКмПьРэНт 595ЕФЙЄзїЧщПі
74HC595в§НХЭМЃЌЙмНХЭМ
______________________
QB--|1 16|--Vcc
QC--|2 15|--QA
QD--|3 14|--SIЃЈDSЃЉ
QE--|4 13|--/GЃЈ/OEЃЉ
QF--|5 12|--RCKЃЈST_CPЃЉ
QG--|6 11|--SRCK(SH_CP)
QH--|7 10|--/SRCLR(/MR)
GND- |8 9|--QH'
________________________
74595ЕФЪ§ОнЖЫЃК
QA--QH: АЫЮЛВЂааЪфГіЖЫЃЌПЩвджБНгПижЦЪ§ТыЙмЕФ8ИіЖЮЁЃ
QH': МЖСЊЪфГіЖЫЁЃЮвНЋЫќНгЯТвЛИі595ЕФSIЖЫЁЃ
SI: ДЎааЪ§ОнЪфШыЖЫЁЃ
74595ЕФПижЦЖЫЫЕУїЃК
/SRCLR(10НХ): ЕЭЕуЦНЪБНЋвЦЮЛМФДцЦїЕФЪ§ОнЧхСуЁЃЭЈГЃЮвНЋЫќНгVccЁЃ
SRCK(11НХ)ЃКЩЯЩ§биЪБЪ§ОнМФДцЦїЕФЪ§ОнвЦЮЛЁЃQA-->QB-->QC-->...-->QHЃЛЯТНЕбивЦЮЛМФДцЦїЪ§ОнВЛБфЁЃЃЈТіГхПэЖШЃК5VЪБЃЌДѓгкМИЪЎФЩУыОЭааСЫЁЃЮвЭЈГЃЖМбЁЮЂУыМЖЃЉ
RCK(12НХ)ЃКЩЯЩ§биЪБвЦЮЛМФДцЦїЕФЪ§ОнНјШыЪ§ОнДцДЂМФДцЦїЃЌЯТНЕбиЪБДцДЂМФДцЦїЪ§ОнВЛБфЁЃ(ЭЈГЃЮвНЋRCKжУЮЊЕЭЕчЦНЃЌ) ЕБвЦЮЛНсЪјКѓЃЌдкRCKЖЫВњЩњвЛИіе§ТіГхЃЈ5VЪБЃЌДѓгкМИЪЎФЩУыОЭааСЫЁЃЮвЭЈГЃЖМбЁЮЂУыМЖЃЉЃЌИќаТЯдЪОЪ§ОнЁЃ
/G(13НХ): ИпЕчЦНЪБНћжЙЪфГіЃЈИпзшЬЌЃЉЁЃШчЙћЕЅЦЌЛњЕФв§НХВЛНєеХЃЌгУвЛИів§НХПижЦЫќЃЌПЩвдЗНБуЕиВњЩњЩСЫИКЭЯЈУ№аЇЙћЁЃБШЭЈЙ§Ъ§ОнЖЫвЦЮЛПижЦвЊЪЁЪБЪЁСІЁЃ
зЂ:
1)74164КЭ74595ЙІФмЯрЗТЃЌЖМЪЧ8ЮЛДЎааЪфШызЊВЂааЪфГівЦЮЛМФДцЦїЁЃ74164ЕФЧ§ЖЏЕчСї(25mA)БШ74595(35mA)ЕФвЊаЁ,14НХЗтзАЃЌЬхЛ§вВаЁвЛаЉЁЃ
2)74595ЕФжївЊгХЕуЪЧОпгаЪ§ОнДцДЂМФДцЦїЃЌдквЦЮЛЕФЙ§ГЬжаЃЌЪфГіЖЫЕФЪ§ОнПЩвдБЃГжВЛБфЁЃетдкДЎааЫйЖШТ§ЕФГЁКЯКмгагУДІЃЌЪ§ТыЙмУЛгаЩСЫИИаЁЃ
1)74164КЭ74595ЙІФмЯрЗТЃЌЖМЪЧ8ЮЛДЎааЪфШызЊВЂааЪфГівЦЮЛМФДцЦїЁЃ74164ЕФЧ§ЖЏЕчСї(25mA)БШ74595(35mA)ЕФвЊаЁ,14НХЗтзАЃЌЬхЛ§вВаЁвЛаЉЁЃ
2)74595ЕФжївЊгХЕуЪЧОпгаЪ§ОнДцДЂМФДцЦїЃЌдквЦЮЛЕФЙ§ГЬжаЃЌЪфГіЖЫЕФЪ§ОнПЩвдБЃГжВЛБфЁЃетдкДЎааЫйЖШТ§ЕФГЁКЯКмгагУДІЃЌЪ§ТыЙмУЛгаЩСЫИИаЁЃ
гы164жЛгаЪ§ОнЧхСуЖЫЯрБШЃЌ595ЛЙЖргаЪфГіЖЫЪБФм/НћжЙПижЦЖЫЃЌПЩвдЪЙЪфГіЮЊИпзшЬЌЁЃ
3)595ЪЧДЎШыВЂГіДјгаЫјДцЙІФмвЦЮЛМФДцЦїЃЌЫќЕФЪЙгУЗНЗЈКмМђЕЅЃЌдке§ГЃЪЙгУЪБSCLRЮЊИпЕчЦНЃЌ GЮЊЕЭЕчЦНЁЃДгSERУПЪфШывЛЮЛЪ§ОнЃЌДЎааЪф595ЪЧДЎШыВЂГіДјгаЫјДцЙІФмвЦЮЛМФДцЦїЃЌЫќЕФЪЙгУЗНЗЈКмМђЕЅЃЌШчЯТУцЕФецжЕБэЃЌдке§ГЃЪЙгУЪБSCLRЮЊИпЕчЦНЃЌ GЮЊЕЭЕчЦНЁЃДгSERУПЪфШывЛЮЛЪ§ОнЃЌДЎааЪфШыЪБжгSCKЩЯЩ§бигааЇвЛДЮЃЌжБЕНАЫЮЛЪ§ОнЪфШыЭъБЯЃЌЪфГіЪБжгЩЯЩ§бигааЇвЛДЮЃЌДЫЪБЃЌЪфШыЕФЪ§ОнОЭБЛЫЭЕНСЫЪфГіЖЫЁЃШыЪБжгSCKЩЯЩ§бигааЇвЛДЮЃЌжБЕНАЫЮЛЪ§ОнЪфШыЭъБЯЃЌЪфГіЪБжгЩЯЩ§бигааЇвЛДЮЃЌДЫЪБЃЌЪфШыЕФЪ§ОнОЭБЛЫЭЕНСЫЪфГіЖЫЁЃ
3)595ЪЧДЎШыВЂГіДјгаЫјДцЙІФмвЦЮЛМФДцЦїЃЌЫќЕФЪЙгУЗНЗЈКмМђЕЅЃЌдке§ГЃЪЙгУЪБSCLRЮЊИпЕчЦНЃЌ GЮЊЕЭЕчЦНЁЃДгSERУПЪфШывЛЮЛЪ§ОнЃЌДЎааЪф595ЪЧДЎШыВЂГіДјгаЫјДцЙІФмвЦЮЛМФДцЦїЃЌЫќЕФЪЙгУЗНЗЈКмМђЕЅЃЌШчЯТУцЕФецжЕБэЃЌдке§ГЃЪЙгУЪБSCLRЮЊИпЕчЦНЃЌ GЮЊЕЭЕчЦНЁЃДгSERУПЪфШывЛЮЛЪ§ОнЃЌДЎааЪфШыЪБжгSCKЩЯЩ§бигааЇвЛДЮЃЌжБЕНАЫЮЛЪ§ОнЪфШыЭъБЯЃЌЪфГіЪБжгЩЯЩ§бигааЇвЛДЮЃЌДЫЪБЃЌЪфШыЕФЪ§ОнОЭБЛЫЭЕНСЫЪфГіЖЫЁЃШыЪБжгSCKЩЯЩ§бигааЇвЛДЮЃЌжБЕНАЫЮЛЪ§ОнЪфШыЭъБЯЃЌЪфГіЪБжгЩЯЩ§бигааЇвЛДЮЃЌДЫЪБЃЌЪфШыЕФЪ§ОнОЭБЛЫЭЕНСЫЪфГіЖЫЁЃ
ЦфЪЕ,ПДСЫетУДЖр595ЕФзЪСЯ,ОѕЕУУЛЪВУДФбЕФ,ЙиМќЪЧПДЖЎЦфЪБађЭМ,ЫЕЕНЕз,ОЭЪЧЯТУцШ§ВН(в§гУ):
ЕквЛВНЃКФПЕФЃКНЋвЊзМБИЪфШыЕФЮЛЪ§ОнвЦШы74HC595Ъ§ОнЪфШыЖЫЩЯЁЃ
ЗНЗЈЃКЫЭЮЛЪ§ОнЕН P1.0ЁЃ
ЗНЗЈЃКЫЭЮЛЪ§ОнЕН P1.0ЁЃ
ЕкЖўВНЃКФПЕФЃКНЋЮЛЪ§Онж№ЮЛвЦШы74HC595ЃЌМДЪ§ОнДЎШы
ЗНЗЈЃКP1.2ВњЩњвЛЩЯЩ§биЃЌНЋP1.0ЩЯЕФЪ§ОнвЦШы74HC595жа.ДгЕЭЕНИпЁЃ
ЗНЗЈЃКP1.2ВњЩњвЛЩЯЩ§биЃЌНЋP1.0ЩЯЕФЪ§ОнвЦШы74HC595жа.ДгЕЭЕНИпЁЃ
ЕкШ§ВНЃКФПЕФЃКВЂааЪфГіЪ§ОнЁЃМДЪ§ОнВЂГі
ЗНЗЈЃКP1.1ВњЩњвЛЩЯЩ§биЃЌНЋгЩP1.0ЩЯвбвЦШыЪ§ОнМФДцЦїжаЕФЪ§Он
ЫЭШыЕНЪфГіЫјДцЦїЁЃ
ЗНЗЈЃКP1.1ВњЩњвЛЩЯЩ§биЃЌНЋгЩP1.0ЩЯвбвЦШыЪ§ОнМФДцЦїжаЕФЪ§Он
ЫЭШыЕНЪфГіЫјДцЦїЁЃ
ЫЕУїЃК ДгЩЯПЩЗжЮіЃКДгP1.2ВњЩњвЛЩЯЩ§биЃЈвЦШыЪ§ОнЃЉКЭP1.1ВњЩњвЛЩЯЩ§би
ЃЈЪфГіЪ§ОнЃЉЪЧЖўИіЖРСЂЙ§ГЬЃЌЪЕМЪгІгУЪБЛЅВЛИЩШХЁЃМДПЩЪфГіЪ§ОнЕФ
ЭЌЪБвЦШыЪ§ОнЁЃ
ЃЈЪфГіЪ§ОнЃЉЪЧЖўИіЖРСЂЙ§ГЬЃЌЪЕМЪгІгУЪБЛЅВЛИЩШХЁЃМДПЩЪфГіЪ§ОнЕФ
ЭЌЪБвЦШыЪ§ОнЁЃ
ЖјОпЬхБрГЬЗНЗЈЮЊ
ШчЃКR0жаДцЗХ3FH,LEDЪ§ТыЙмЯдЪО“0”
;*****НгПкЖЈвхЃК
DS_595 EQU P1.0 ;ДЎааЪ§ОнЪфШыЃЈ595-14ЃЉ
CH_595 EQU P1.2 ;вЦЮЛЪБжгТіГхЃЈ595-11ЃЉ
CT_595 EQU P1.1 ;ЪфГіЫјДцЦїПижЦТіГхЃЈ595-12ЃЉ
DS_595 EQU P1.0 ;ДЎааЪ§ОнЪфШыЃЈ595-14ЃЉ
CH_595 EQU P1.2 ;вЦЮЛЪБжгТіГхЃЈ595-11ЃЉ
CT_595 EQU P1.1 ;ЪфГіЫјДцЦїПижЦТіГхЃЈ595-12ЃЉ
;*****НЋвЦЮЛМФДцЦїФкЕФЪ§ОнЫјДцЕНЪфГіМФДцЦїВЂЯдЪО
OUT_595:
CALL WR_595 ;ЕїгУвЦЮЛМФДцЦїНгЪевЛИізжНкЪ§ОнзгГЬађ
CLR CT_595 ;РЕЭЫјДцЦїПижЦТіГх
NOP
NOP
SETB CT_595 ;ЩЯЩ§биНЋЪ§ОнЫЭЕНЪфГіЫјДцЦїЃЌLEDЪ§ТыЙмЯдЪО“0”
NOP
NOP
CLR CT_595
RET
OUT_595:
CALL WR_595 ;ЕїгУвЦЮЛМФДцЦїНгЪевЛИізжНкЪ§ОнзгГЬађ
CLR CT_595 ;РЕЭЫјДцЦїПижЦТіГх
NOP
NOP
SETB CT_595 ;ЩЯЩ§биНЋЪ§ОнЫЭЕНЪфГіЫјДцЦїЃЌLEDЪ§ТыЙмЯдЪО“0”
NOP
NOP
CLR CT_595
RET
;*****вЦЮЛМФДцЦїНгЪевЛИізжНкЃЈШч3FHЃЉЪ§ОнзгГЬађ
WR_595:
MOV R4,#08H ;вЛИізжНкЪ§ОнЃЈ8ЮЛЃЉ
MOV A,R0 ;R0жаДцЗХвЊЫЭШыЕФЪ§Он3FH
LOOP:
;ЕквЛВНЃКзМБИвЦШы74HC595Ъ§Он
RLC A ;Ъ§ОнвЦЮЛ
MOV DS_595,C ;ЫЭЪ§ОнЕНДЎааЪ§ОнЪфШыЖЫЩЯЃЈP1.0ЃЉ
;ЕкЖўВНЃКВњЩњвЛЩЯЩ§биНЋЪ§ОнвЦШы74HC595
CLR CH_595 ;РЕЭвЦЮЛЪБжг
NOP
NOP
setb CH_595 ;ЩЯЩ§биЗЂЩњвЦЮЛ(вЦШывЛЪ§Он)
WR_595:
MOV R4,#08H ;вЛИізжНкЪ§ОнЃЈ8ЮЛЃЉ
MOV A,R0 ;R0жаДцЗХвЊЫЭШыЕФЪ§Он3FH
LOOP:
;ЕквЛВНЃКзМБИвЦШы74HC595Ъ§Он
RLC A ;Ъ§ОнвЦЮЛ
MOV DS_595,C ;ЫЭЪ§ОнЕНДЎааЪ§ОнЪфШыЖЫЩЯЃЈP1.0ЃЉ
;ЕкЖўВНЃКВњЩњвЛЩЯЩ§биНЋЪ§ОнвЦШы74HC595
CLR CH_595 ;РЕЭвЦЮЛЪБжг
NOP
NOP
setb CH_595 ;ЩЯЩ§биЗЂЩњвЦЮЛ(вЦШывЛЪ§Он)
DJNZ R4,LOOP ;вЛИізжНкЪ§ОнУЛвЦЭъМЬај
RET
RET
ЖјЦфМЖСЊЕФгІгУ
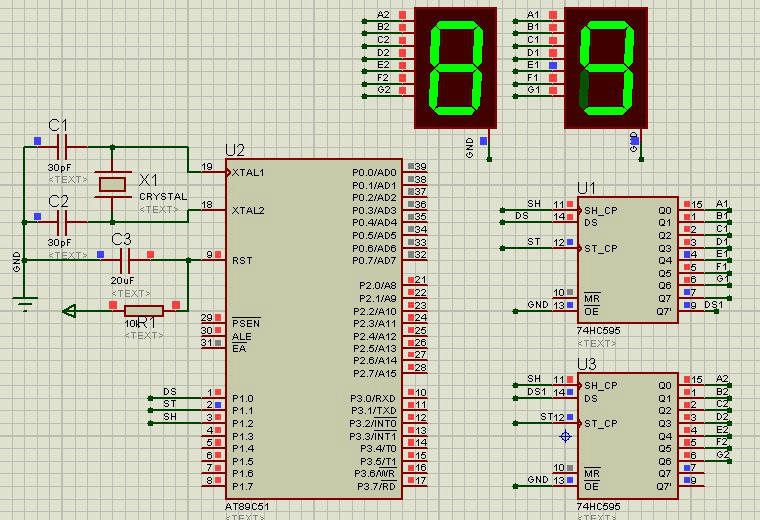
74HC595жївЊгІгУгкЕуеѓЦСЃЌвд16*16ЕуеѓЮЊР§ЃКДЋЫЭвЛааЙВЖўИізжНкЃЈ16ЮЛЃЉ
ШчЃКЗЂЫЭЕФЪЧ06HКЭ3FHЁЃЦфЗНЗЈЪЧЃК
1.ЯШЫЭЪ§Он3FHЃЌКѓЫЭ06HЁЃ
2.ЭЈЙ§МЖСЊДЎааЪфШыКѓЃЌ3FHдкIC2ФкЃЌ06HдкIC1ФкЁЃгІгУШчЭМЖў
3.НгзХЫЭЫјДцЪБжгЃЌЪ§ОнБЛЫјДцВЂГіЯждкIC1КЭIC2ЕФВЂааЪфГіПкЩЯЯдЪОЁЃ
74HC595жївЊгІгУгкЕуеѓЦСЃЌвд16*16ЕуеѓЮЊР§ЃКДЋЫЭвЛааЙВЖўИізжНкЃЈ16ЮЛЃЉ
ШчЃКЗЂЫЭЕФЪЧ06HКЭ3FHЁЃЦфЗНЗЈЪЧЃК
1.ЯШЫЭЪ§Он3FHЃЌКѓЫЭ06HЁЃ
2.ЭЈЙ§МЖСЊДЎааЪфШыКѓЃЌ3FHдкIC2ФкЃЌ06HдкIC1ФкЁЃгІгУШчЭМЖў
3.НгзХЫЭЫјДцЪБжгЃЌЪ§ОнБЛЫјДцВЂГіЯждкIC1КЭIC2ЕФВЂааЪфГіПкЩЯЯдЪОЁЃ
БрГЬЗНЗЈЃК
Ъ§Ондк30HКЭ31Hжа
;MOV 30H,#3FH
;MOV 31H,#06H
;*****НгПкЖЈвхЃК
DS_595 EQU P1.0 ;ДЎааЪ§ОнЪфШыЃЈ595-14ЃЉ
CH_595 EQU P1.2 ;вЦЮЛЪБжгТіГхЃЈ595-11ЃЉ
CT_595 EQU P1.1 ;ЪфГіЫјДцЦїПижЦТіГхЃЈ595-12ЃЉ
DS_595 EQU P1.0 ;ДЎааЪ§ОнЪфШыЃЈ595-14ЃЉ
CH_595 EQU P1.2 ;вЦЮЛЪБжгТіГхЃЈ595-11ЃЉ
CT_595 EQU P1.1 ;ЪфГіЫјДцЦїПижЦТіГхЃЈ595-12ЃЉ
;*****ДЎааЪфШы16ЮЛЪ§Он
MOV R0,30H
CALL WR_595 ;ДЎааЪфШы3FH
nop
NOP
MOV R0,31H
CALL WR_595 ;ДЎааЪфШы06H
NOP
NOP
SETB CT_595 ;ЩЯЩ§биНЋЪ§ОнЫЭЕНЪфГіЫјДцЦїЃЌЯдЪО
NOP
NOP
CLR CT_595
RET
MOV R0,30H
CALL WR_595 ;ДЎааЪфШы3FH
nop
NOP
MOV R0,31H
CALL WR_595 ;ДЎааЪфШы06H
NOP
NOP
SETB CT_595 ;ЩЯЩ§биНЋЪ§ОнЫЭЕНЪфГіЫјДцЦїЃЌЯдЪО
NOP
NOP
CLR CT_595
RET
MC74HC595AАќРЈвЛИі8ЮЛвЦЮЛМФДцЦїКЭвЛИі8ЮЛDаЭЫјДцЦїКЭШ§ЬЌВЂааЪфГіЁЃвЦЮЛМФДцЦїНгЪмДЎааЪ§ОнВЂЬсЙЉДЎааЪфГіЁЃвЦЮЛМФДцЦївВЬсЙЉВЂааЪ§ОнЪфГіКЭ8ЮЛЫјДцЦїЁЃвЦЮЛМФДцЦїКЭЫјДцЦїЖМгаЖРСЂЕФЪБжгЪфШыЁЃетИіICЛЙОпгавьВНИДЮЛЕФЙІФмЁЃ
HC595AПЩвджБНгКЭCMOS MPUЕФКЭMCUЕФSPIНгПкНјааСЌНгЁЃ

#include"reg51.h"
sbit DS_595= P1^0;
sbit CT_595= P1^1;
sbit CH_595= P1^2;
int tab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
int temp;
void delay(int ms)
{
int i;
while(ms--)
for(i=0;i<120;i++);
}
void WR_595(void)
{
int k,temp1,temp2;
for(k=7;k>=0;k--)
{
temp1=1<<k;
temp2=temp & temp1;
if(temp2==temp1)
{
DS_595=1;
}
else
{
DS_595=0;
}
CH_595=0;
delay(2);
CH_595=1;
}
}
void main()
{
int m;
for(m=0;m<16;m++)
{
temp=tab[m];
WR_595();
CT_595=0;
delay(2);
CT_595=1;
delay(2);
CT_595=0;
delay(500);
}
}
#include"reg51.h"
sbit DS_595= P1^0;
sbit CT_595= P1^1;
sbit CH_595= P1^2;
sbit AA=P1^3;
sbit BB=P1^4;
int yu[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,
0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
int temp,court,gg,ss,m,n,j;
void delay(int ms)
{
int i;
while(ms--)
for(i=0;i<120;i++);
}
void WR_595(void)
{
int k,temp1,temp2;
for(k=7;k>=0;k--)
{
temp1=1<<k;
temp2=temp & temp1;
if(temp2==temp1)
{
DS_595=1;
}
else
{
DS_595=0;
}
CH_595=0;
delay(2);
CH_595=1;
}
}
void display(m)
{
temp=yu[m];
WR_595();
CT_595=0;
delay(1);
CT_595=1;
delay(1);
}
void main()
{
for(m=0;m<1000;m++)
{
n=m/1000;
BB=1;AA=1;
P2=0x80;
display(n);
n=(m%1000)/100;
BB=1;AA=0; P2=0x40;
display(n);
n=((m%1000)%100)/10;
BB=0;AA=1; P2=0x20;
display(n);
n=m%10;
AA=0;BB=0; P2=0x01;
display(n);
delay(600);
}
}
