
 1 引言
1 引言
轮式移动机器人是机器人研究领域的一项重要内容.它集机械、电子、检测技术与智能控制于一体。在各种移动机构中,轮式移动机构最为常见。轮式移动机构之所以得到广泛的应用。主要是因为容易控制其移动速度和移动方向。因此.有必要研制一套完整的轮式机器人系统。并进行相应的运动规划和控制算法研究。笔者设计和开发了基于5l型单片机的自动巡线轮式机器人控制系统。
摘 要:设计了一种自动巡线轮式行走机器人控制系统,采用AT89S52型单片机作为主控CPU,外加一个复杂可鳊程逻辑器件(CPID)协助CPU处理数据,扩展了程序参数存储器,能够进行检测引导线和直流电机、舵机的PWM控制。
关键词:控制系统;复杂可编程逻辑器件;存储器;光电检测;脉冲宽度调制
2 控制系统总体设计
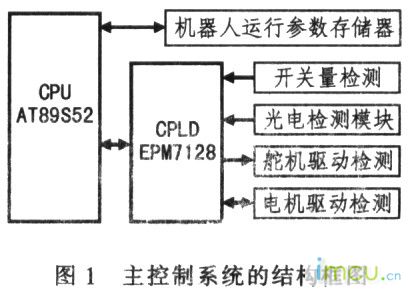
机器人控制系统由主控制电路模块、存储器模块、光电检测模块、电机及舵机驱动模块等部分组成,控制系统的框图如图1所示。
3 主控制模块设计
3.1 CPLD设计
在机器人控制系统中.需要控制多个电动机和行程开关.还要进行光电检测.如果所有的任务都由AT89S52型单片机来完成.CPU的负担就会过重。影响系统的处理速度。因此扩展1个CPLD.型号为EPM7128。它属于.MAX7000系列器件。包括2个通用1/0口.2个专用I/O口,专用I/O口可作为每个宏单元和输入输出引脚的高速控制信号(时钟、清除和输出使能等),电动机的。PWM信号也由其产生。
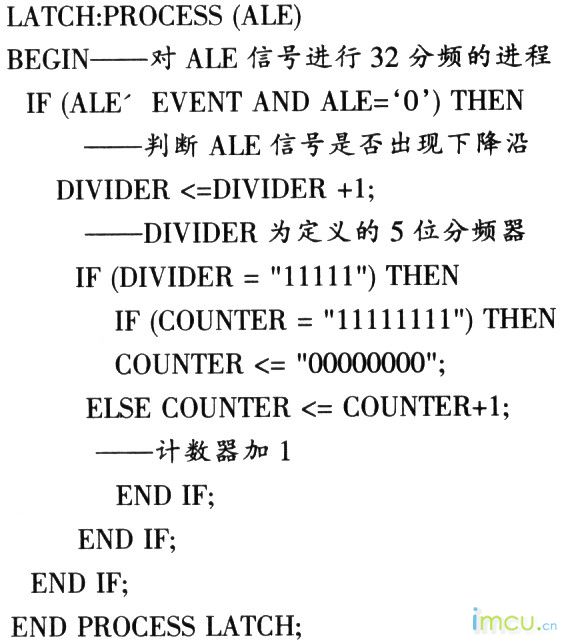
EPM7128的引脚排列如图2所示。MlP—M4P引脚的输出为PWM脉宽调制信号,M1FB—M4FB引脚为电机的方向控制信号,P00一P07接单片机的PO口,100一1015为扩展的2个通用I/O口,SIl—S17引脚为行程开关输入信号,LI11一LI17引脚为光电探头输入信号。CPLD的编程用VHDL语言,产生1路PWM信号的部分程序源代码如下:
单片机采用24MHz的晶体振荡器,ALE信号的频率fALE=f16=6MHz,最终输出PWM信号的引脚MlP的频率为:
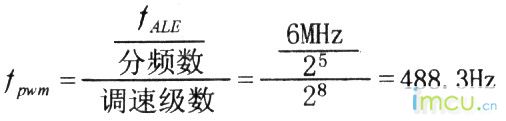

调节这个信号的占空比可以使直流电动机获得O-255级的转速。
3.2 机器人运行参数存储器的扩展
机器人运行路径和动作可以根据比赛情况的不同而发生变化,这样,每改变1次运行参数就必须对单片机的Flash进行1次擦写。为了解决这一问题.扩展了程序参数存储器,用来存放机器人的运行路径和动作参数.扩展电路如图3所示。
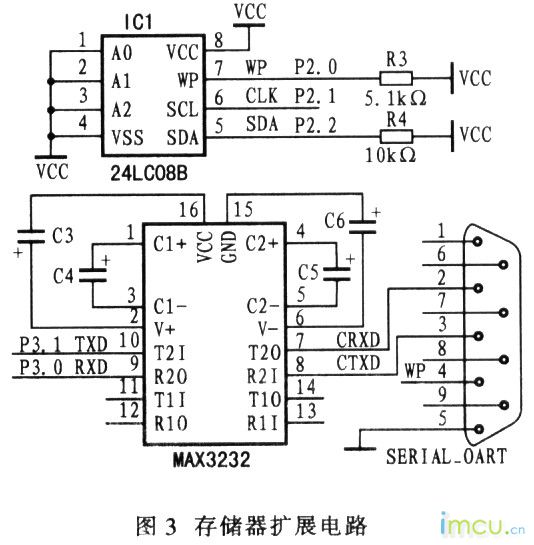
其中IC1为24LC08B,是I2E总线的串行E2PROM存储器,最多能够存储lK字节的数据。IC2为MAX3232型电平转换器,其内部有1个电源电压变换器,可以将计算机的电平转换为标准TTL电平,实现计算机与单片机之间通过串行口传输数据,使单片机完成对24/LC08B的数据存储操作。单片机运行时,直接从24LC08中读取机器人的运行参数,控制机器人运行。
4 光电检测模块设计
4.1 光电检测过程
设计光电检测模块是为了让机器人能够检测地面上的白色引导线。光电检测电路主要包括发射部分和接收部分,其原理如图4所示。
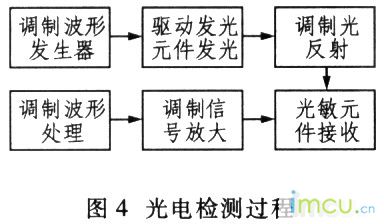
发射部分的波形调制采用了频率调制方法。由于发光二极管的响应速度快,其工作频率可达几MHz或十几MHz,而检测系统的调制频率在几十至几百kHz的范围内,能够满足要求。光源驱动主要负责把调制波形放大到足够的功率去驱动光源发光。光源采用红外发光二极管,工作频率较高,适合波形为方波的调制光的发射。
接收部分采用光敏二极管接收调制光线,将光信号转变为电信号。这种电信号通常较微弱,需进行滤波和放大后才能进行处理。调制信号的放大采用交流放大的形式,可使调制光信号与背景光信号分离,为信号处理提供方便。调制信号处理部分对放大后的信号进行识别,判断被检测对象的特性。因此,此模块的本质是将“交流”的、有用的调制光信号从“直流”的、无用的背景光信号中分离出来,从而达到抗干扰的目的。
4.2 光电探头
光电探头安装在机器人底盘前部,共设置了5个检测点。从理论上讲,检测点越多、越密,识别的准确性与可靠性就越高,但是硬件的开销与软件的复杂程度也相应的增加。采用该巡线系统保证了检测的精确度,节约了硬件的开销。发光二极管发出的调制光经地面反射到光敏二极管。光敏二极管产生的光电流随反射光的强弱而线性变化。把这种变化检测出来,就可以判断某一个检测点是否在白色引导线的上方,从而判断机器人和白色引导线的相对位置。
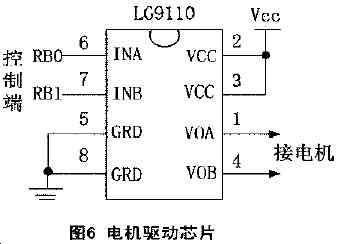
5 电机驱动模块
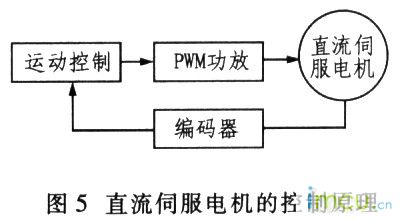
机器人的驱动件主要是电机和舵机,都可以采用PWM进行调速与控制。根据脉冲编码器的反馈信号,对机器人的运动状态进行实时控制。直流伺服电机的控制原理如图5所示。调节:PWM的信号就能够快速调节舵机的转角,从而实现机器人的方向控制。
6 结束语
基于5l型单片机的自动巡线轮式机器人控制系统运行平稳可靠,抗干扰能力强,不仅满足了机器人大赛的设计要求,同时也为智能机器人搭建了良好的控制平台。
-------------------------------------2---------------------------
中文摘要:
基于仿生原理,以PIC单片机为控制器的核心,制作出了动作灵活、价格低廉以及模块化结构的六足机器人。该机器人能够严格按三角步态进行行走,实现诸如直线、转弯、躲避障碍物和追踪物体等行走功 能。文中介绍了该机器人三角步态的行走原理、结构组成、控制系统和控制算法。
英文摘要:
This research describes the fabrication of a hexapod bionic robot, controlled by PIC microprocessor, walking based on bionic principle, which has some advantages such as simple, active movements, harmony in walking and etc. This robot has some abilities such as linear walking, turning, avoiding barriers, and tracking object walking etc. The structure, control system and control algorithm of this robot are explained in the paper.
前 言
机器人技术是融合了机械、电子、传感器、 计算机、人工智能等许多学科的知识,涉及到当今 许多前沿领域的技术。一些发达国家已把机器人制 作比赛作为创新教育的战略性手段。如日本每年都 要举行诸如“NHK杯大学生机器人大赛”、“全日本机 器人相扑大会”、“机器人足球赛”、“全日本电子鼠 走迷宫大赛”等各种类型的机器人制作比赛,参加 者多为学生,旨在通过大赛全面培养学生的动手能 力、创造能力、合作能力和进取精神,同时也普及智 能机器人的知识。 开展机器人的制作活动,是培养大学生的创 新精神和实践能力的最佳实践活动之一,特别是机 电专业学生开展综合知识训练的最佳平台。目前国 内在机器人的制作中,较多地选用机器人公司出售 的产品,通过积木式的搭配或组装来进行创意组合 设计。这样方式的特点是设计制作方便、快捷, 更适合于创意组合设计。但存在着成本较高,且 设计的机器人功能要受到产品本身性能的制约,并 不能充分实现设计者的创意和设想等缺点。 这里强调大学生自行动手进行机构设计、软 件编程和硬件电路制作,旨在充分发挥学生潜在的 创造制作能力。本文基于仿生原理,设计制作了两 套连杆机构作为机器人的六足,以PIC单片机为控制 器的核心,小型带减速器直流电机作为驱动元件,配 置不同类型的传感器,再加上智能软件的控制,制 作出了动作灵活、价格低廉、以及模块化结构的六 足机器人。文中介绍了该机器人三角步态的行走原 理、结构组成、控制系统和控制算法。
2.1 PIC单片机
美国Microchip 公司的PIC16 系列单片机是一 种新型的CMOS 工艺的8 位单片机。因其功耗低,超 小型,低成本,功能完整和简单易学等特点已经 得到了越来越广泛的应用。PIC16F84 微控制器属 于PIC 系列单片机的中级产品,18 引脚。内置4k × 14 闪速程序存储器,可多次修改程序,使用起 来特别方便。具有两个I/O 端口(RA 和RB),片 内上电复位、延时电路、看门狗电路等。基于 PIC16F84 控制器的I/O 口资源的分配如图5 所 示。
2.3 传感器模块
障碍物检测传感器要求检测的距离远,选用 市场上常见的反射式红外线传感器,型号为 TX05D。该传感器是一体化的红外线发射,接受器 件,它内部包含红外线发射,接受及信号放大与 处理电路。信号输出端可直接与CPU 端口相连,探 测距离为2 ~120cm,满足了机器人的硬件要求。 PIC16F84单片机的RB4、RB5 管脚分别与两只TX05D 传感器的信号输出端相连。 触角传感器使用的是普通的微动机械开关, 用于检测红外传感器探测不到的,处于较高位置的 障碍物。当机器人的触角接触到障碍物后,触动 机械开关,发出控制信号,控制机器人转弯或后 退,躲开处于前方的障碍物。两只机械开关经防 抖动电路处理后,分别与PIC16F84 单片机的RB6、 RB7 管脚相连。
4. 结论
本文基于仿生原理,使用连杆机构作为机器 人的六足,以PIC单片机为控制器的核心,小型带减 速器直流电机作为驱动元件,配置不同类型的传感 器,再加上智能软件的控制,制作出了动作灵活、价 格低廉、功能强大以及模块化结构的六足机器人。大 量的行走实验证明,该机器人能够严格按三角步态 的进行行走,完成诸如直线、转弯、躲避障碍物和追 踪物体等行走功能,具有一定的娱乐性和实际应用 价值。