
БОЮФЫљгаИНМўЯТдиЕижЗЃКhttp://www.51hei.com/f/Arduino and Matlab.zip
MatlabЪЧдЫгУМЋЙуЕФЪ§бЇШэМўЁЃArduinoгжЪЧЯждкКмЛ№ЕФПЊдДгВМўЦНЬЈЁЃСНепСЌЦ№РДЭцвВЪЧКмЫЌЕФЁЃ
ЬиБ№ЪЧЯждкMatlabГіСЫArduinoжЇдЎЬзМўвдКѓЃЌЭцЦ№РДБШвдЭљЕФДЎПкЭЈаХМђЕЅЖрСЫЁЃ
ЕквЛВПЗж Matlab Arduino Support package
ЕкЖўВПЗж Simulink Arduino Support package
ЕкШ§ВПЗж MatlabЕФДЎПкЭЈаХ
ЕкШ§ВПЗж SimulinkЕФДЎПкЭЈаХ
МсГжГжајИќаТгыБрМЁЃ
Part 1 Matlab Arduino Support package
етИіжЇГжАќЪЧЮЊСЫЪЕЯжMatlabгыArduinoжЎМфЕФДЎПкЭЈаХЁЃЛљгкдкArduinoАхЩЯЬсЧАЩеаДЕФЗўЮёЦїГЬађЃЈServer programЃЉЃЌМрЬ§ДЎПкЕФУќСюЃЌашвЊЕФЛАПЩвдЗЕЛиНсЙћЁЃвВОЭЪЧЫЕЃЌArduinoАхжЛашвЊЬсЧАЩеаДвЛИіГЬађЃЌжЎКѓБуПЩЭЈЙ§MatlabУќСюЖдЦфжБНгВй зїЁЃ
ИУжЇдЎАќжЇГжбЇЩњАцЕФMatlabЁЃжЇГжЕФПижЦАхгаUNOЃЌMega 2560ЃЌDuemilanoveЁЃ
ПЩвддкMatlabЙйЭјЯТдиЃЌЕижЗhttp://www.mathworks.de/hardware-support/arduino-matlab.html
ЕуЛїЯТЗНЕФRequirementПђРяЕФ“MATLAB Support Package for Arduino”ЃЌдкаТДђПЊЕФЭјвГжадкгвБпЕуЛїDownload SubmissionМДПЩ
вВПЩвддкБОЬљЕФИНМўжБНгЯТдиArduinoIOбЙЫѕАќ
ЯТдиКѓНтбЙЁЃАбНтбЙЮФМўРяЕФpde/adiosrv/adiosrv.pdeЮФМўгУArduino IDEЩеаДЕНArduinoПижЦАхЩЯЁЃ
АбmatlabЕФЙЄзїТЗОЖаоИФЕНArduinoIOЮФМўМаЁЃетбљХфжУОЭЫуЭъГЩСЫЁЃ
ЯждкРДЪЕбщвЛЯТЁЃгУmatlabЭъГЩвЛИіМђвзЕФusbЪОВЈЦї
ЪзЯШНЈСЂarduinoКЭmatlabЕФСЌНгЃЌДњТыШчЯТ
a = arduino('COM3');
matlabЛсгУМИУыжгЕФЪБМфРДНЈСЂСЌНг
гУвЛИі1kХЗЕФПЩЕїЕчзшДЎСЊвЛИі1kХЗЕФЕчзшЁЃШчЯТЭМСЌНгЃЌТЅжїгУЕФЪЧAnalogRead pin 5

НЋЯТУцЕФДњТыжБНгИДжЦЕНMatlabУќСюПђЃЌМДПЩдЫааЁЃ
interval = 10000;
passo = 1;
t = 1;
x = 0;
while(t<interval)
b = a.analogRead(5)*10; % АбЖСЕНЕФжЕЗХДѓ10БЖ
x = [x,b];
plot(x);
grid
t = t+passo;
drawnow;
end
Дгa5ЫљЖСЕФжЕЛсЪЕЪБЕФЛдкЭМЩЯЃЌаЇЙћШчЯТЭМЁЃПЩвдздМКЪжЖЏЕїећПЩЕїЕчзшзшжЕЃЌМДПЩдкplotДАПкЙлВьзшжЕБфЛЏЁЃ

ЯТУцРДЪдвЛЯТАбжЇдЎЬзМўгУЕНGUIЕуССЛђЯЈУ№led 
етРяЮЊСЫЪЙгУdigitalWrite(pin)ЩшжУСЫСНИіpushbuttonЁЃБъЧЉЃЈtagЃЉЗжБ№ЪЧled1КЭled2
дкКЏЪ§ _OpeningFcn РяЩшжУШЋОжБфСПЃЌвдМАГѕЪМЛЏЁЃ
global a;
global led1_state;
global led2_state;
a = arduino('COM3');
a.pinMode(3,'output');
a.pinMode(4,'output');
a.pinMode(5,'input'); % 5ЖСШЁ3ЕФзДЬЌ
a.pinMode(6,'input'); % 6ЖСШЁ4ЕФзДЬЌ
led1_state = 0;
led2_state = 0;
дкКЏЪ§ led1_CallbackжаЬэМгШчЯТДњТы
global a;
global led1_state;
if led1_state == 0
a.digitalWrite(3,1);
led1_state = a.digitalRead(5);
set(hObject, 'BackgroundColor',[0 0 1]);
else
a.digitalWrite(3,0);
led1_state = a.digitalRead(5);
set(hObject, 'BackgroundColor',[1 1 0]);
end
ИљОнБфСПled1_stateЩшжУled1ЕФзДЬЌЁЃЖСШЁled1зДЬЌЃЌИќаТБфСПled1_stateЁЃИќИФАДХЅбеЩЋ
ШчЙћЪЙгУtogglebuttonЃЌПЩвдЪЁТдШЋОжБфСПled1_stateЃЌПЩжБНгЪЙгУa.digitalWrite(3,(get(hObject,'Value')))НјаазДЬЌЧаЛЛЁЃ
зЂвтЃКШчЙћЕкЖўДЮжДааЕФЪБКђУЛгаАбгяОф a = arduino('COM3')ЩОГ§ЃЌЛђепУЛгаЧхГ§БфСПaЁЃЖМЛсГіЯжДэЮѓ
дкКЏЪ§led2_CallbackжаРрЫЦЁЃЭъећДњТыдкИНМў
ДгЩЯУцЕФЪЕР§ПДГіЃЌaЪЧвЛИіarduinoРрЁЃЭЈЙ§ЕїгУarduinoРрЕФКЏЪ§ЖдПижЦАхНјааВйзїЁЃетЪБКђЕФArduinoПижЦАхПДЩЯШЅИќЯёЪЧжДааЛњЁЃ
ЦфЪЕMatlab Support Package for ArduinoЕФОјДѓВПЗжВйзїКЏЪ§ЖМКЭArduino IDEЕФБрГЬКмЯёЁЃЩЯЪжЛсКмПьЃЌетВПЗжОЭВЛзіЙ§ЖрЕФЪЕР§СЫЁЃ
ИќЖрИУжЇГжАќЕФВйзїКЏЪ§ПЩвдВЮМћЮФМўМаArduinoIOЯТУцЕФarduino.mЮФМўЁЃ
ЮвЛсдкетТЅЮЊДѓМвећРэвЛЯТЃЌЗНБуЪЙгУ
Part2 Simulink Arduino Support package
етИіЬзМўЦфЪЕОЭИќКУЭцСЫЁЃВЛгУдйЗбаФЗбСІЕФаДДњТыЁЃЖјЪЧжБНггУsimulinkДюНЈКУСїГЬЃЌдЫЫуЙиЯЕЃЌОЭПЩвджБНгЩеаДЕНПижЦАхЩЯСЫЃЌетОЭБфГЩСЫФЃПщЛЏБрГЬЁЃПЩЯЇЕФЪЧИУЬзМўжЛжЇГжUNOКЭMega 2560ЁЃ
АВзАЬзМўЕФЙ§ГЬЩдЮЂТщЗГвЛЕу
ДђПЊЯТУцЕФЕижЗЃЌЕуЛїзюЯТУцЕФ”Get Support Package Now“ ОЭЛсжБНгЯТдиСЫЁЃвВПЩвддкБОТЅЕФИНМўжаЯТдиЁЃ
http://www.mathworks.de/hardware-support/arduino-simulink.html
АВзАЗНЗЈЃК
НтбЙЃЌЕуЛїЯТЭМЕФGet Hardware Support PackagesЁЃШЛКѓбЁдёИеВХНтбЙЕФЮФМўМаЃЌЯТвЛВН

вВПЩвджБНгАббЙЫѕАќжаЕФarduino.mlpkginstallжБНгЭЯЕНmatlaУќСюПђжаЁЃ
ШЛКѓАДЬсЪОПЊЪМАВзАЁЃ
зЂвтЃКАВзАашвЊвЛИіmatlabеЫКХЃЌНЈвщДѓМвЬсЧАзЂВсКУЃЌбЇЩњЩэЗнеЫКХОЭПЩвдгУСЫЁЃ
ДђПЊsimulink libraryПЩвддкзѓБпПДЕНSimulink Support Package for Arduino Hardware
ЕуЛїОЭПЩвдПДЕНДѓМвЪьЯЄЕФКЏЪ§ЕФФЃПщСЫ
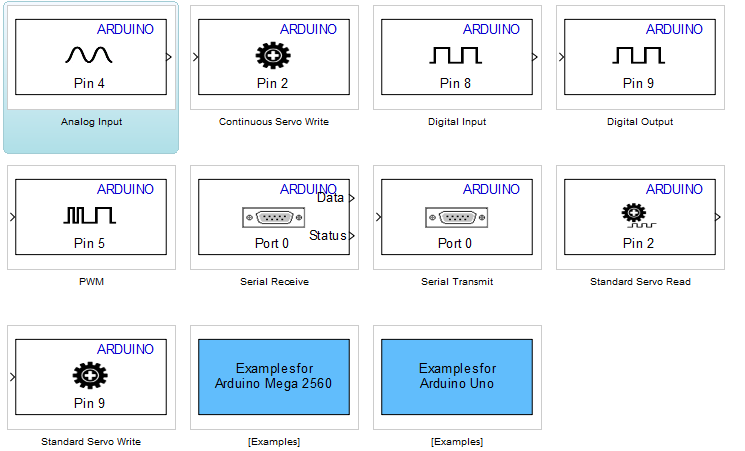
ЯждкЗХвЛИіаЁЪЕР§ЁЃаТНЈвЛИіsimulinkЯюФПЃЌ
бЁвЛИіDigital OutputКЭвЛИіPulse GeneratorЃЈдкsimulink/sourcesРяУцЃЉ
ШчЯТЭМСЌНгКУЁЃ
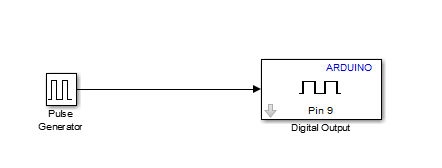
ЩшжУЯТPulse GeneartorЁЃИќИФздМКашвЊЕФЦЕТЪЃЌеМПеБШЕШЁЃ
ЫЋЛїDigital OutputаоИФЯргІЕФpin number
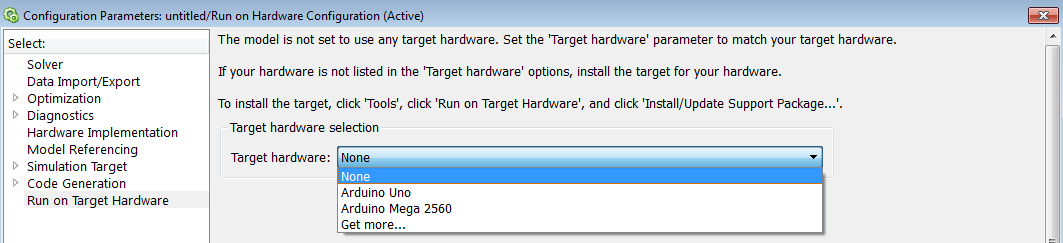
ЩшжУЭъвдКѓПЩвдПЊЪМЩеаДСЫЁЃАДЯТЭМДђПЊХфжУДАПк
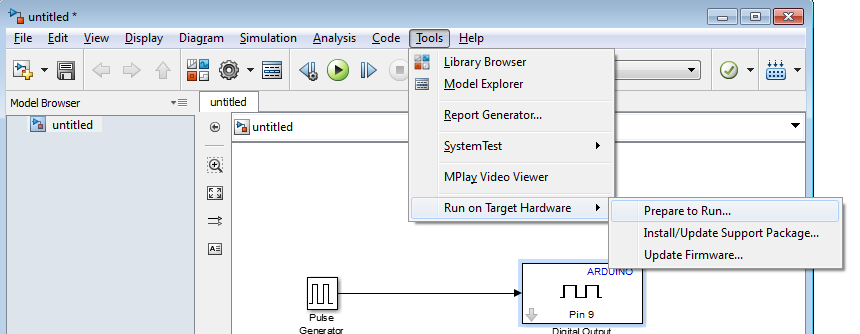
бЁдёЖдгІЕФПижЦАхаЭКХ
ШЛКѓЩшжУЖЫПкЃЈПЩвдбЁздЖЏЃЌЛђЪжЖЏЃЉЩшжУВЈЬиТЪЃЈЯрЕБгкIDEБрГЬЪБsetup()КЏЪ§РяЕФSerial.begin()ЃЉ
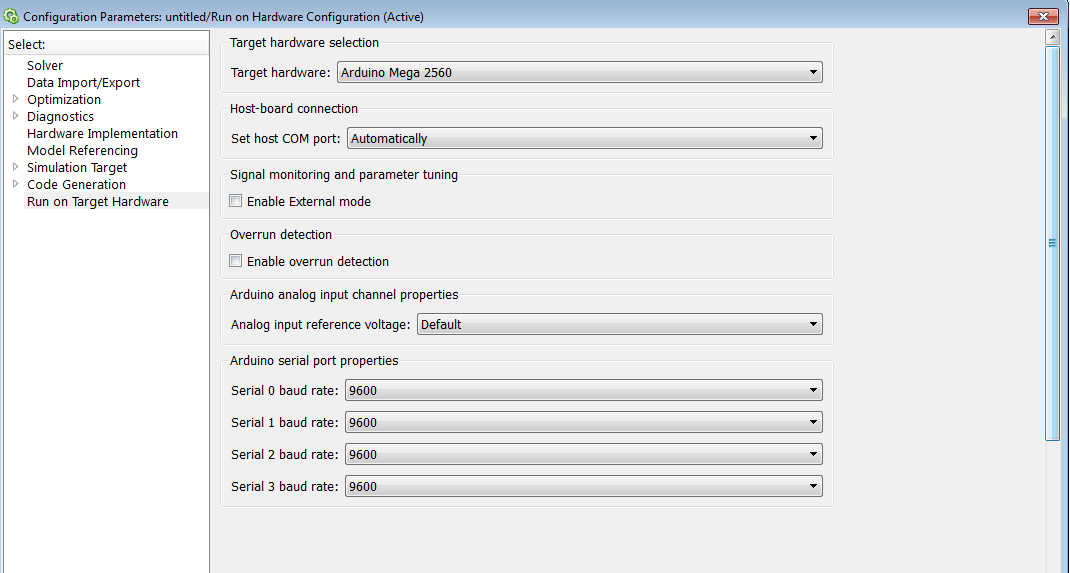
ЩшжУЭъГЩЕуЛїБЃДцЁЃ
ЛиЕНsimulinkБрМДАПкЃЌАДЯТЭМЕуЛї"Run"ПЊЪМЩеаД
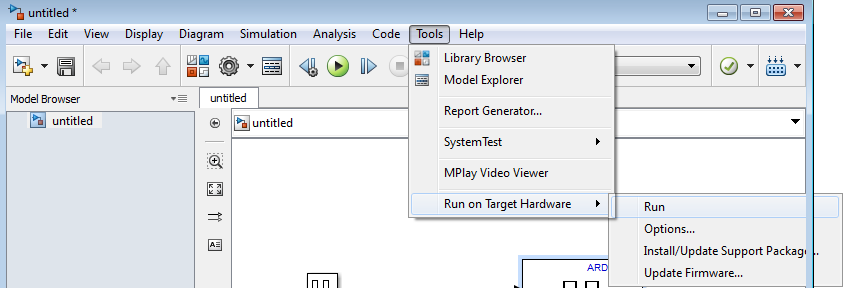
ШчЙћХфжУЕФarduinoаЭКХЛђЖЫПкВЛе§ШЗЃЌЩеаДЛсГіЯжДэЮѓЃЌЕуЛї"Run"ЯТУцЕФoptionsжиаТХфжУЁЃ
Part 2вВВЛзіЙ§ЖрЕФНщЩмСЫЃЌгІИУЖМЪЧArduinoЭцМвЪьЯЄЕФЖЋЮїЁЃ
Simulink Support Package for ArduinoЃК
Part 3 Matlab ДЎПкЭЈаХ
гаЕФЪБКђЮвУЧздМКИјArduinoБрКУСЫГЬађЃЌгжЯЃЭћдкMatlabжаЕїгУДЎПкЃЌЖСШЁЪ§ОнЁЃДЫЪБ Matlab Support Package for ArduinoЯдШЛВЛКЯЪЪСЫЁЃетРяЮвУЧвЊгУЕНMatlabРяЕФДЎПкЖдЯѓserialЁЃБШШчЕБЮвУЧашвЊРћгУMatlabДІРэЩуЯёЭЗЛУцЃЌНсКЯЩуЯёЭЗБъЖЈЁЂЩуЯёЭЗЪЖБ№ЁЂ3DЩЈУшКѓНЈФЃЕШЕШЁЃ
ЛЙЪЧвдpart1РяУцЕФМђвзЪОВЈЦїЮЊР§ЁЃ
ArduinoДњТыШчЯТЃК
int analogPin = 5;
int val = 0;
void setup()
{
Serial.begin(9600);
}
void loop()
{
val = analogRead(analogPin);
Serial.println(val);
}
етРяЛЙЪЧвЊЪЕЯжMatlabЕФМДЪБЖСШЁКЭЛЭМЁЃMatlabДњТыШчЯТЃК
s = serial('COM3'); %ЖЈвхДЎПкЖдЯѓ
set(s,'BaudRate',9600); %ЩшжУВЈЬиТЪs
fopen(s); %ДђПЊДЎПкЖдЯѓs
interval = 10000; %етРяПЊЪМЕФДњТыКмPart1РяЕФДњТыРрЫЦ
passo = 1;
t = 1;
x = 0;
while(t<interval)
b = str2num(fgetl(s)); %гУКЏЪ§fget(s)ДгЛКГхЧјЖСШЁДЎПкЪ§ОнЃЌЕБГіЯжжежЙЗћЃЈЛЛааЗћЃЉЭЃжЙЁЃ
x = [x,b]; %ЫљвддкArduinoГЬађРявЊЪЙгУSerial.println()
plot(x);
grid
t = t+passo;
drawnow;
end
fclose(s); %ЙиБеДЎПкЖдЯѓs
ЦфЫћЙигкДЎПкЖдЯѓserialЕФКЏЪ§жЎКѓИќаТ
Part 4 Simulink ДЎПкЭЈаХ
МШШЛКЭmatlabЭЈаХЃЌДІРэаХКХЕБШЛЫуЪЧгУsimulinkИќЗНБуСЫЁЃВЛТлЪЧзіЪЕбщЛЙЪЧбаЗЂЖМОГЃгУЕНsimulinkКЭЦфЫћПижЦЦїРДНЈФЃКЭВЩМЏЪ§ОнЗжЮіЁЃЖдгкЯёЮветбљЕФ*ЫПЃЌПЩФмвВЯЃЭћФмгУsimulinkКЭArduinoвЛЦ№ЭцЁЃ
ЯШЫЕЯТSimulinkШчКЮДгArduinoЪЕЪБНгЪеЪ§ОнЁЃКЭsimulinkХфКЯЕФжиЕугІИУЪЧЗжЮіЁЂДІРэЪ§ОнЃЌЖјВЛЪЧПижЦВПЗжЁЃ
ЮвУЧЛЙЪЧбигУPart1РяУцЕФanalogReadЁЃ
ЯШДђПЊsimulink libraryЁЃЕуЛїзѓБпЕФInstrument Control ToolBoxЁЃМћЯТЭМ
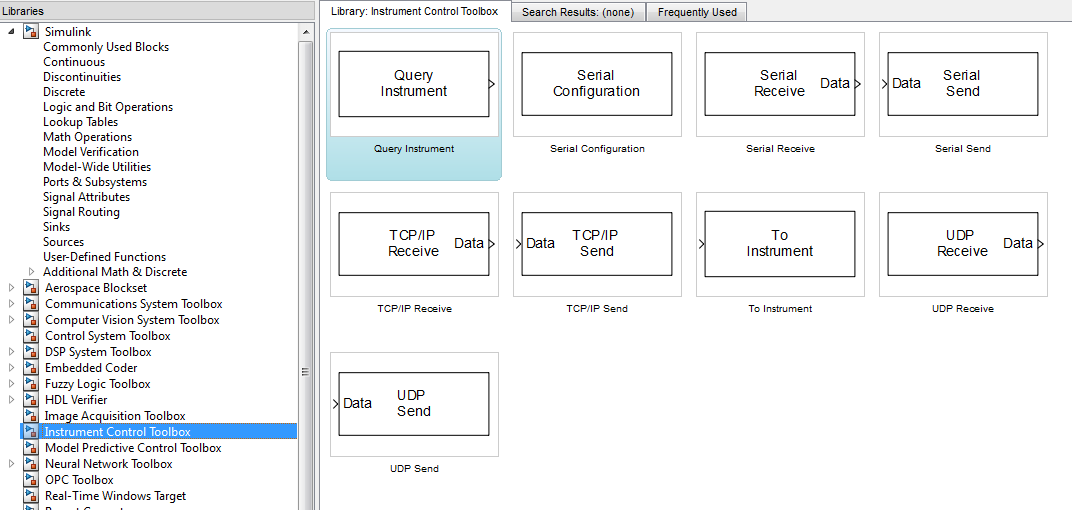
РяУцгаQuery InstrumentЁЂTo InstrumentЁЂSerial ConfigurationЁЂSerial ReceiveКЭSerial SendQuery InstrumentКЭTo InstrumentХфЬзЪЙгУ
Serial ConfigurationЁЂSerial ReceiveКЭSerial SendХфЬзЪЙгУ
ЯШЪЙгУSerial ReceiveЁЃбЁдёвЛИіSerial ReceiveЁЃдкSimulink/SinksРяУцбЁдёвЛИіDisplayЁЃШчЯТЭМСЌНгВЂЩшжУЁЃ
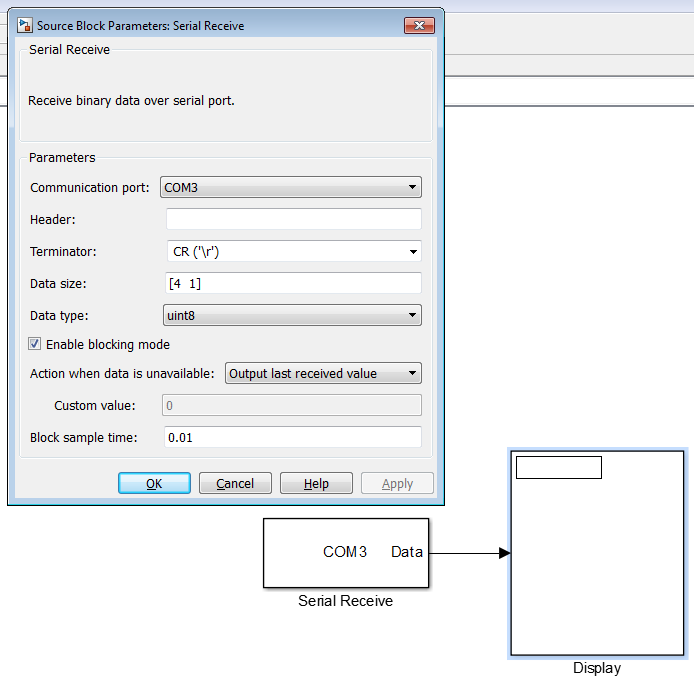
жївЊНВЯТЦфжаЕФМИИіживЊХфжУЁЃ
HeaderСєПеЁЃTerminatorЪЧДЎПкЪфШыЕФНсЮВПижЦЗћЁЃвђЮЊArduinoГЬађРяУцгУЕФЪЧSerial.prinln()ЃЌвВОЭЪЧУПИізжЗћДЎЖМвдЛЛааЗћНс ЮВЁЃЫљвдетРяЮвбЁдёCR('\r')ЃЌБэЪОУПзщЪ§ОнЖСЕННсЮВПижЦЗћЃЌЕЋВЛАќКЌИУПижЦЗћЃЌвВОЭЪЧдкCR('\r')жЎЧАЕФжЦЖЈЮЛЪ§ЕФЪ§ОнЛсБЛЖСШЁЁЃ DatasizeвЊЖЈвхвЛИіСйЪБДцЗХЪ§ОнЕФОиеѓЁЃЮвЪЙгУЕФЕчЮЛЦїЮЊ1kХЗЃЌЕчзшЪЧвЛЧЇХЗЃЌВтСПЕФЪЧЕчзшСНЖЫЕФЕчбЙЁЃвВОЭЪЧЫЕВтСПЗЖЮЇЪЧ5VЕН 2.5VЃЌanalogRead()ЕФЗЕЛижЕЗЖЮЇЪЧ0-1024ЖдгІ0ЕН5VЃЌИљОнетРяЕФЧщПіЃЌгІИУЪЧ1023ЕН512ЁЃВЛАќКЌ'\r'ЕФЧщПіЯТЃЌЕУЕНЕФ зжЗћДЎгІИУЪЧ4ЕН3ЮЛЁЃЫљвдднЪБАбDatasizeЃЈДцЗХОиеѓЃЉОиеѓЩшжУЮЊ[4,1]ЁЃ
Enable blocking modeЙДбЁЕФЧщПіЯТБэЪОЃЌЖСШЁЪфШыЪ§ОнЪБднЭЃЦфЫћФЃПщЁЃШчЙћЙДбЁЃЌSerial ReceiveФЃПщжЛгавЛИіOutputЮЊDataЃЌЖСШЁЙ§ГЬДѓИХЪЧетбљЃЌДгArduinoЗЂГіЕФЪ§ОнЛсВЛЭЃЕФРлЛ§ДцЕНЕчФдЛКДцЧјЁЃSerial ReceiveФЃПщЛсАДееЪ§ОнНјШыЕФЫГађЖСШЁЁЃвђЮЊЦфЫћЕФВйзїжЛФмдкСНДЮВЩбљжЎМфНјааЃЌЫљвдетЪБЖСШЁЪ§ОнВЛЪЧЪЕЪБЕФЃЌЖјЪЧгабгГйЕФЃЌЫцзХЪБМфбгЪБдНРДдНГЄЁЃШчЙћВЛЙДбЁЃЌдђгаСНИіOutputЮЊDataКЭStatusЃЌstatusжЛгаСНжжжЕ1Лђ0,1БэЪОгаПЩгУЕФЪ§ОнЃЌ0БэЪЧУЛгаПЩгУЕФЪ§ОнЁЃвђЮЊВЛЛсднЭЃЦфЫћФЃПщЃЌФЃПщвтЭтЕФВйзїЃЈФЃФтЃЉПЩвдПДзіЪЧСЌајЕФЃЌЫљвдЯждкЪЧЪЕЪБЕФЁЃ
Action when data is unavailableЃЈУЛгаПЩЖСЪ§ОнЪБЕФааЮЊЃЉЃЌгаСНИібЁЯюЃЌOutput last received valueЃЈПЩРэНтЮЊЪфГізюКѓНјШыЛКДцЕФЪ§ОнЃЉКЭOutput Custom value(ЪфГіздЖЈвхжЕЃЌбЁдёИУЯюЪБЃЌПЩдкЯТУцЕФCustom ValueНјааЩшжУЃЌФЌШЯЮЊСу)ЁЃ
ЩшжУЭъГЩКѓЛсГіЯжЬсЪОПђЃЌЪЧЗёСЂПЬЩњГЩДЎПкХфжУФЃПщ(Serial Configuration)ЃЌИУФЃПщгУЭЈгУЕФДЎПкХфжУ(Serial ReceiveКЭSerial Send)ЁЃШчЙћВЛСЂПЬЩњГЩЃЌжЎКѓвВвЊЪжЖЏЬэМгЁЃ
ДђПЊSerial ConfigurationПЩвдНјааВЈЬиТЪЃЌДЎПкКХЕФЩшжУЁЃШчЯТЭМ
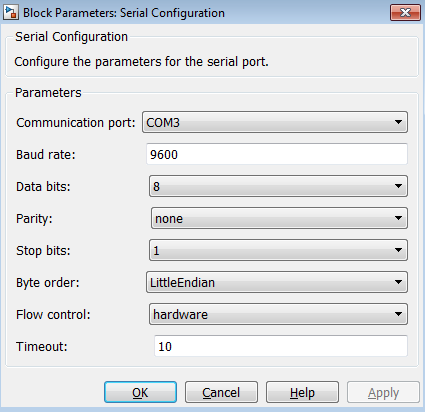
ДѓВПЗжЖМВЛНтЪЭСЫЃЌЖМЪЧЛљБОЕФДЎПкВЮЪ§ЩшжУЁЃ
Flow ControlЃЈЙмРэЪ§ОнДЋЪфЫйЖШЃЉЃЌСНИібЁЯюnone(УЛга)КЭhardwareЃЈгВМўПижЦЃЉ
Time Out(ГЌЪБ)ЃЌдкУПИіЗТецВНЕШД§Ъ§ОнЕФзюДѓЪБМфСПЁЃ
ХфжУЭъГЩКѓЃЌдЫааЁЃПЩвдАбЗТецЪБМф(simulation stop timeЃЌВЅЗХМќХдБп)ЩшжУДѓвЛЕуЁЃ

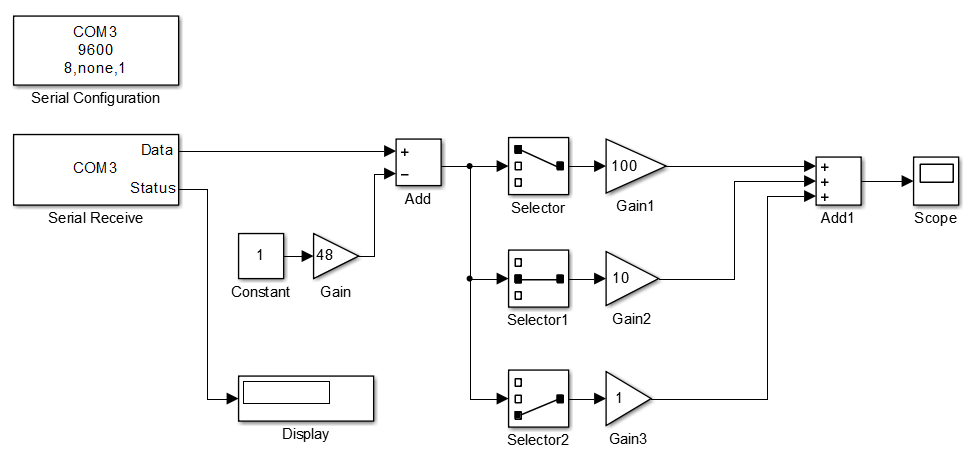
гвБпЕФЭМЖдгІ"1023"ЃЌзѓБпЕФЖдгІ"714"ЁЃзѓБпЭМжаЕквЛЮЛЪЧ10ЃЌЧАУцЫЕЙ§ArduinoГЬађРяЪЙгУЕФЪЧSerial.printlnЁЃУПвЛааДЎПкЪ§ОнЦ№ЪМЮЛЮЊLF('\n')ЃЌНсЪјЮЛЮЊCR('\r')ЁЃLF('\n')ЖдгІЕФASCiiТыОЭЪЧ10ЁЃИќИУSerial ReceiveФЃПщРяЕФHeaderвдМАTerminatorЖМУЛгагУЁЃНщЩмвЛИіБШНЯЭЕРСЕФАьЗЈЃЌдкArduinoжааоИФДњТыЃК
val = analogRead(analogPin)
val = map(val, 5, 1023, 100, 999); //АбvalЕФжЕаоИФЕН100жС999ЕФЗЖЮЇжЎМф
етбљОЭАбжЕбЯИёЕФПижЦдкСЫ3ЮЛЁЃАбdatasizeИФЮЊ[3 1]ЁЃ
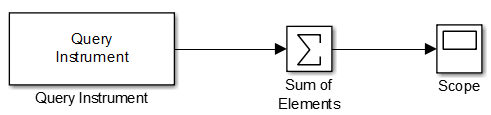
ЯждкРДзїЭМЁЃSerial receiveЕФOutputВЛФмжБНгКЭScopСЌНгЃЌЗёдђПДЕНЕФЪЧASCiiТыЕФжЕБЛЛЕНЭМжаЁЃАДЯТЭМВйзї
ДѓМввВПЩвддкИНМўЯТдибЙЫѕАќЁЃЦфжаЮФМўУћЮЊtest1
ПЩвдАбSerial receiveРяЕФEnable blocking modeЙДбЁКЭВЛЙДбЁЃЌЖдБШЯТаЇЙћЁЃ
ЯрБШжЎЧАЕФSerial receiveЯждкЪЙгУЕФQuery InstrumentМђЕЅЕФЖрСЫЁЃАДЯТЭМСЌНгЯТ
ДђПЊQuery InstrumentЕФХфжУДАПкЁЃ
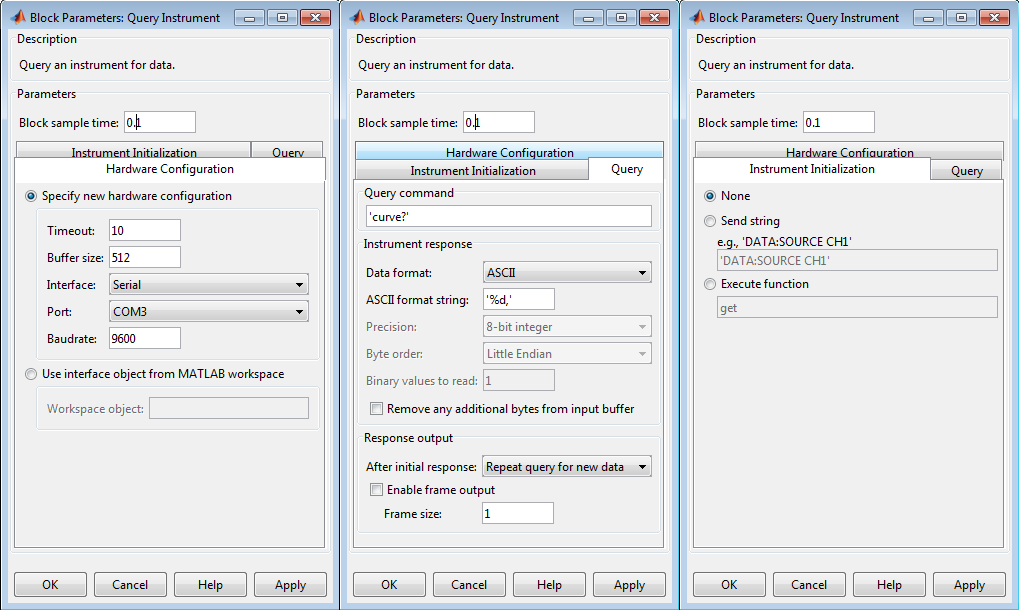
Ш§ИіБъЧЉЃЌHardware ConfigurationЁЂQueryЁЂInstrument InitialisationЁЃгаЕФЩшжУКЭSerial ReceiveвЛЕФ
Hardware ConfigurationВЛЖрЫЕСЫЃЌЛљБОЕФДЎПкЩшжУЃЌВЈЬиТЪЁЂДЎПкКХЁЂЛКГхЧјДѓаЁЕШЁЃгавЛЕуЫЕУїЯТЃЌдкInterfaceПЩвдПДЕНетРяПЩвдбЁдёЭЈаХЗНЪНЃЌВЛжЙЪЧSerialЃЌР§ШчЛЙгаTCPIPЕШЕШЁЃQuery InstrumentЪЧвЛИіЭЈгУЕФНгЪеВщбЏФЃПщЁЃ
Instrument InitialisationжЛдкПижЦАхашвЊвЛИіГѕЪМаХКХЕФЪБКђВХашвЊ
QueryПЩвдИљОнздМКЕФашвЊбЁдёЃЌASCiiЁЂBinaryЃЌBinblock
ЖМЪЧаЉЛљДЁжЊЪЖЃЌОЭВЛдкЬћзгРяЖрЫЕСЫЃЌВЛЧхГўЕФСєбдЁЃ(етИіФЃПщецЕФЪЧКмМђЕЅ)
ЮвУЧбЁдёФЌШЯЩшжУЃЌвВОЭЪЧASCiiТыЁЃетбљЪфГіЕФЪЧзжЗћДЎЃЌЖјЧввбОЦўЭЗШЅЮВСЫЃЌВЛашвЊЕЃаФЪ§ОнЮЛЪ§ЁЃЛЙФмдкМђЕЅвЛЕуУД
зжЗћДЎдкsimulinkе§ЪНвдASCiiТыДцЗХЕФЃЌАбЫљгадЊЫиАДЫГађ”ЦД“Ц№РДОЭЕУЕНСЫЮвУЧашвЊЕФЯргІЕФжЕЁЃетРягУsimulink/math operations/sum of ElementsОЭПЩвдСЫЁЃ
зЂвтЃКШчЙћвЛПЊЪМЕФжЕЪЧ1023(analogreadЕФзюДѓжЕ)ЃЌгаЕФЪБКђдЫааsimulinkЛсГіДэЁЃФПЧАЛЙУЛВщГідвђЁЃ
ДѓМввВПЩвддкИНМўЕФбЙЫѕАќжаевЕНЖдгІЕФЮФМўЃЌЮФМўУћtest
БОЮФЫљгаИНМўЯТдиЕижЗЃКhttp://www.51hei.com/f/Arduino and Matlab.zip