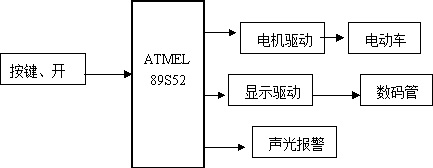
本系统以51系列单片机89S52为控制中心,外加电机驱动集成电路L298、七段码译码显示集成电路74LS247、七段码数码管等外围元件控制电动车前进、后退、停止等运行状态,并显示所需时间、发出声光报警。本次设计前进、后退、停止等状态运行时间通过简单估算及实验测试最终确定,并通过单片机定时完成。单片机通过接收键盘信号确定小车的工作方式,从而启动具有相应定时参数的运行程序;单片机执行程序时根据定时信息适时发出控制信号给电机驱动集成电路L298;而L298通过输出高电压、低电压、零值电压来控制电动车的前进、后退、刹车、停止等运行模式。
一 核心模块的方案论证和比较:
1 电动车位置测定方案的选择:
由于题目要求电动车在运行到某一特定位置时要改变运动状态,因此需要实时测定电动车的位置。可以有以下方案:
方案一:机械测距。采用行程开关测定电动车是否到达某一特定位置,然后将信号传入单片机;
方案二:光电测距。采用红外线二极管对射获得电动车当前位移。
方案三:时间测距。电动车在跷跷板水平和倾斜两种状态下前进和后退的速度是固定不变的(启动和制动的过程除外),尽管两者并不相同。我们可以通过理论估算和实验修正最终确定电动车在以上两种状态下的速度。因此,时间就代表了电动车在跷跷板中的位置。通过定时可以很好地把握电动车改变运动状态的时机。而定时又可采用两种子方案。1.外部硬件电路定时。如利用555振荡器产生秒信号,然后利用十进制计数器74LS160计数定时,并利用相应译码显示集成电路74LS247、七段码数码管显示时间。这里,单片机的作用仅仅是向计数器/计时器电路发出开始、结束等控制信号。该方案优点在于节省了单片机I/O端口,节省了程序长度,缩短了执行时间,保证了控制的实时性。缺点在于增加了硬件定时电路的成本,增加了电路的复杂性,定时的准确度往往不能得到保证。2.软件定时。单片机通过软件进行定时,采用时钟信号作为时间基准,启用程序计数功能。该方案定时准确,不增加硬件投资。尽管增加了程序的长度,但对于单片机存储容量的要求微乎其微,尽管稍稍延长了程序执行时间,但对控制的时效性的影响几乎可以忽略不计。
综上所述,软件定时测电动车的位置方案节省硬件投资,简化电路,简单易行,并且还可以方便地实时显示时间,因此我们选用方案三中的软件定时。
2 电机的选择:
方案一:采用步进电机。步进电机的显著特点就是具有快速启动和停止能力。如果负荷不超过步进电机所提供的动态转矩值,就可以使电机快速启动、停止和反转。另一个显著特点就是转换精度高,正转反转控制灵活。但步进电机价格相对较高。
方案二:采用普通直流电机。直流电机具有良好的调速性能,调速平滑方便,调速范围广;过载能力强,能承受频繁的冲击负载,可实现频繁的无级快速启动、制动和反转;能满足生产过程自动化系统各种不同的特殊运行要求。
由于比赛前购买的电动车安装的是普通的直流电机,因此采用直流电机相对节省了购买步进电机的大量开支;而且直流电机驱动电路相对简单,因此选用直流电机降低了电路的复杂度,同时也减小了硬件部分的故障概率。我们选用方案二。
3直流电机制动性能的改进:
方案一:采用能耗制动的方法:即需要停车时,切断电源,使电动车在摩擦力作用下停止。
方案二:采用短时反接制动的方法:需要停车时,通过单片机控制驱动芯片L298向电动车提供负向电源,促使其快速停车。
方案一受惯性影响,停车较慢,方案二在不增加硬件、软件成本的前提下缩短了制动时间,提高了控制的时效性。我们选用方案二。
4 跷跷板平衡状态的检测与实现:
方案一:采用角度传感器来实现。利用角度传感器实时测试跷跷板当前状态与水平位置的夹角,将其输出的八位格雷码输入单片机的I/O口,经过程序采集、分析及处理,向电动车驱动电路发出相应的控制信号。当角度传感器检测到当前处于平衡位置时,发出停车信号。
方案二:利用估算及反复实验确定合适位移,从而达到平衡状态。当配重物体重量、位置均固定不变时,小车只要运动到一个特定位置跷跷板即可到达平衡位置。只要利用物理上的杠杆原理对小车的这个特定位移进行估算,并通过多次实验进行统计处理即可得到。
我们选用方案二。
二 系统的具体设计与实现
本系统利用51系列单片机89S52作为电动车运动控制中心,外接角度传感器用来检测跷跷板的平衡状态,利用键盘及拨码开关设定跷跷板的初始位置及配重物体的位置信息,利用两位数码管显示时间,利用蜂鸣器及发光二极管进行声光报警。软件部分主要包括根据设定信息及角度传感器输入的信息进行定时、电机驱动信号的产生、声光报警信号的产生等。
以下分硬件和软件两个部分进行分析讨论:
1 系统的硬件设计:
原理框图如下:
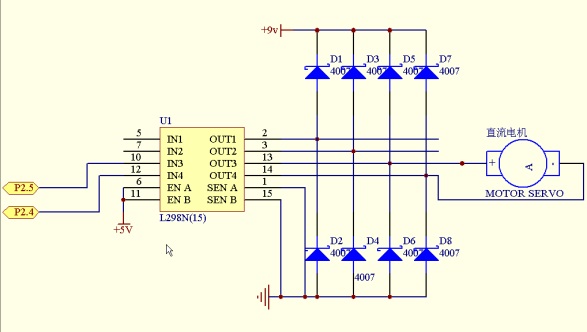
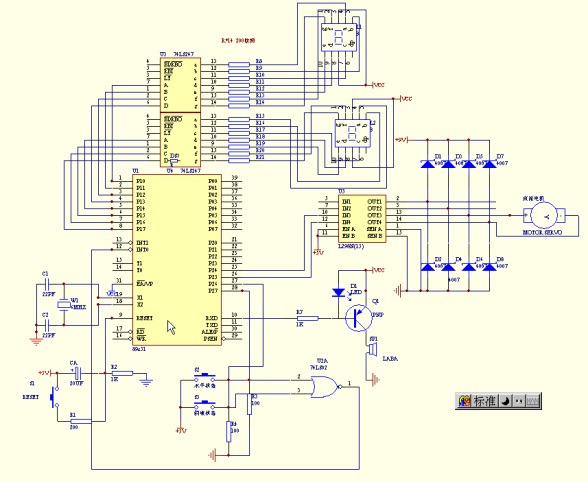
键盘输入部分:由于设计题目要求电动车分别在水平固定木板、倾斜木板、配重物体位置固定及在一定区域内移动等四种工作方式下运行,所以设置了A、B两个键设定不同的工作模式。A、B两键分别连接P2.7、P2.6口,高电平有效。此外,在工作方式4中,A、B两个键还用来输入配重物体所在的位置信息。电机驱动电路: 采用L298驱动,可控制电机的正转、反转、刹车、停止。其外型及功能如下:  [/url] 显示电路: 采用两位七段码数码管用来显示小车运动所需要的时间。由2片74LS247将P0口输出的8位8421BCD码转换为2个七段码,分别供两位数码管显示。 声光报警: 由单片机P3.0口输出报警信号,通过蜂鸣器发出声音报警,通过发光二极管进行光线报警。 2 软件部分设计:  程序编写流程图如下:
本电动车分为四种工作方式:方式1:电动车在固定水平板上往返运动。设正程需要时间t11,返程需要时间。 方式2:在跷跷板配重倾斜状态下,电动车往返运动。设正程需要时间t21,返程需要时间t22。 方式3:配重物体置于某特定位置,小车运动至跷跷板平衡位置并停止5秒以上。设小车运动t3时间跷跷板平衡。 方式4:配重物体置于可移动区域的任意位置,小车运动至跷跷板平衡位置并停止5秒以上。小车运动时间t4直接决定于配重物体的位置,只要键入该信息,即可得到运动时间t4。 以上时间t11、t12、t21、、t22、t3、、t4均可由电机转速、路程估算,并通过多次实验值进行修正,并将其写入程序。 三 测量仪器、测量方法与数据 1 测量仪器: 秒表 米尺 2 测量数据: (1)基本要求:
* 跷跷板水平状态下小车的行驶时间(单位:秒)
* 跷跷板倾斜状态下小车的行驶时间(单位:秒)
(2)发挥部分:
将配重物体放置在可移动范围内的某位置,检测小车运动至跷跷板平衡状态所需时间及声光报警情况如下:
四 结束语 本次设计在51系列单片机AMTEI89S52的控制及电机驱动L298、译码显示电路、声光报警电路、角度传感器的配合下,不仅成功地完成了跷跷板水平固定状态下、倾斜状态下小车往返、停止的操作、计时显示的功能,而且完成了配重物体随意放置下平衡状态下的报警、时间显示以及静止等功能。
附:控制部分电路图
以上的Word格式文档51黑下载地址(没有代码):
| 









 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

