|
|
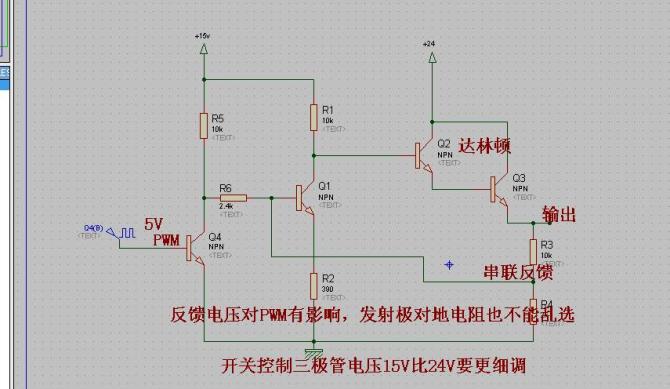
说明:用了PWM控制三极管开关调压。检测电压自动调整占空比稳压。显示用四位共阳数码管74HC164移位显示。
DC24V调整到DC12V,开关管用13005,用NPN与13005组成达林顿,前级控制用NPN实现5V PWM与24V连接 明天补上实物照片。 - //STC12C2052AD输出PWM波 ,同时检测电压显示,自动稳压 。
- //74HC164串入并出显示数码管,一位一位显示,之后熄灭省电,根据我焊的板子确定的数码管值。
- #include <stc12c2052ad.h>
- #include <intrins.h>
- #define uchar unsigned char
- #define uint unsigned int
- #define AD_SPEED 0x60 //0110,0000 1 1 270个时钟周期转换一次,
- //少占鱼制作 河北正定欢迎您 长沙航空职业技术学院 2010 年QQ:411656434
- //京畿之地 魅力河北 河北欢迎您
- uchar code tab[16]={0x11,0xd7,0x25,0x45,0xc3,
- // 0 1 2 3 4
- 0x49,0x09,0xd5,0x01,0x41,0x81,
- // 5 6 7 8 9 A
- 0x0b,0x39,0x07,0x29,0xa9}; //共y阳数码管
- // b e d e f
- uchar xianshi[4]={0x11,0xd7,0x25,0x45};
- sbit M=P1^5; //过压指示灯
- sbit N=P1^6; //欠压指示灯
- sbit LED=P1^7; //充满 指示灯
- sbit PWM=P3^7;
- sbit wei1=P3^5;
- sbit wei2=P3^2;
- sbit wei3=P3^3;
- sbit wei4=P3^4;
- bit START =0;
- uchar timeL=0x90;
- uchar timeH=0x90;
- /****************************************************************/
- void pwm();
- void delayms(uint);
- void ADC();
- void InitADC();
- //void baohu();
- void ceshi();
- void sendchar();
- float voltage=0.0;
- uint vol=0;
- //显示测试
- void ceshi()
- {
-
- uchar i;
- TI=0;
- wei1=0;
- wei2=0;
- wei3=0;
- wei4=0;
- for(i=0;i<16;i++)
- {
- SBUF=tab[i];
- while(!TI);
- TI=0;
- delayms(850);
- }
- wei4=1;
- wei3=1;
- wei2=1;
- delayms(1600);
- wei1=1;
- }
- void sendchar()
- {
-
- TI=0;
- SBUF=tab[xianshi[0]];
- while(!TI);
- TI=0;
- wei1=0;
- wei1=0;
- delayms(1200);
- wei1=1;
- SBUF=tab[xianshi[1]];
- while(!TI);
- TI=0;
- wei2=0;
- wei2=0;
- delayms(1200);
- wei2=1;
- SBUF=tab[xianshi[2]];
- while(!TI);
- TI=0;
- wei3=0;
- wei3=0;
- delayms(1200);
- wei3=1;
- SBUF=tab[xianshi[3]];
- while(!TI);
- TI=0;
- wei4=0;
- wei4=0;
- delayms(1200);
- wei4=1;
- }
- /***8**************************************************************/
- void main()
- {
-
- uint a=0;
- PWM=1;
- delayms(1000);//延时
-
- delayms(600);
-
- ceshi();
- pwm();
- InitADC();
- START=0;
- while(1)
- {
- ADC();
- if(START)
- {
- pwm();
- delayms(5);
- }
- a++;
- if(a==6235)
- {
- a=0;
- sendchar();
- }
- }
-
- }
- //
- //
- void pwm()
- {
- CR=0;
- START=0;
- //PCA模块工作于PWM模式 C程序
- CMOD = 0x02; //用定时器0溢出做PCA脉冲
- CL = 0x00; //PCA定时器低8位 地址:E9H
- CH = 0x00; //PCA高8位 地址 F9H
- CCON=0x00;
- CCAP0L = timeL; //PWM模式时他俩用来控制占空比
- CCAP0H = timeH; //0xff-0xc0=0x3f 64/256=25% 占空比(溢出)
- CCAPM0 = 0x42; //0100,0010 Setup PCA module 0 in PWM mode
- // ECOM0=1使能比较 PWM0=1 使能CEX0脚用作脉宽调节输出
- /*********************
- PCA 模块工作模式设置 (CCAPMn 寄存器 n= 0-3四种)
- 7 6 5 4 3 2 1 0
- - ECOMn CAPPn CAPNn MATn TOGn PWMn ECCFn
- 选项: 0x00 无此操作
- 0x20 16位捕捉模式,由 CEXn上升沿触发
- 0x10 16位捕捉模式,由CEXn下降沿触发
- 0x30 16位捕捉模式,由CEXn的跳变触发
- 0x48 16位软件定时器
- 0x4c 16位高速输出
- 0x42 8位PWM输出
- 每个PCA模块另外还对应两个寄存器:CCAPnH和CCAPnL 。 捕获或者比较时,它们用来
- 保存16位计数值,当工作于PWM模式时,用来控制占空比
- *******************************/
- CR=1; //Start PCA Timer.
- }
- //AD转换初始化 ----打开ADC电源
- void InitADC()
- {
- P1=0xff;
- ADC_CONTR|=0x80;
- delayms(22);
- //这两个寄存器用来设置 P1口四种状态,每一位对应一个P1引脚 ,按状态组合操作
- /*****************
- P1M0 和P1M1 寄存器位 7 6 5 4 3 2 1 0
- P1.7 P1.6 P1.5 P1.4 P1.3 P1.2 P1.1 P1.0
- 同理P3M0 P3M0 也是。因为STC12C2052AD只有两个P口,所以只有这俩组 STC12C5410AD还多P2M0 P1M0 有三组
- P1M0 P1M1 高
- 0 0 普通I0口 (准双向) P1寄存器位 7 6 5 4 3 2 1 0
- 0 1 强推挽输出 (20MA电流 )尽量少用 P1.7 P1.6 P1.5 P1.4 P1.3 P1.2 P1.1 P1.0
- 1 0 仅做输入 A/D转换时可用此模式
- 1 1 开漏 ,A/D转换时可用此模式
-
- 例如:
- 要设置P1.2为 AD 输入口
- 则 P1M0=0X02 ;
- P1M1=0X02; 开漏即可
- 当不用AD时,最好 关闭ADC电源 ,恢复为IO口状态
- ********************************/
- P1M0=0x01;//这两个寄存器用来设置 P1口四种状态,每一位对应一个P1引脚 ,按状态组合操作
- P1M1=0x01;//设置P1.0为
- }
-
- // AD转换程序
- void ADC()
- {
- float V0;
- ADC_DATA = 0; //清除结果
- ADC_CONTR = 0x60; //转换速度设置 0x60 最快速度
- ADC_CONTR = 0xE0; //1110,0000 清 ADC_FLAG, ADC_START 位和低 3 位
- ADC_CONTR =0xe0;
- // ADC_CONTR |= 0x00; //选择 A/D 当前通道 P1.0
- delayms(1); //使输入电压达到稳定
- ADC_CONTR = 0xe8;
- // ADC_CONTR |= 0x08; //0000,1000 令 ADCS = 1, 启动A/D转换,
- while(!(ADC_CONTR & 0x10)); //!的优先级比&高太多了
- //养成经常加括号的习惯 ,没坏处 。也不浪费速度
- /***************
- 这里while 不能改成while(ADC_CONTR & 0x10==0) ;就错误了,因为优先级 ==比&高 ,所以要加括号
- while( (ADC_CONTR & 0x10) ==0) 或者非一下 while(!(ADC_CONTR & 0x10)); //!的优先级比&高太多了
- ******************************/
- ADC_CONTR =0xe0;
- //ADC_CONTR &= 0xE7; //1111,0111 清 ADC_FLAG 位, 关闭A/D转换,
- V0= ADC_DATA; //返回 A/D 10 位转换结果
- voltage=V0*5.00/256.00*6.00;
- vol=voltage*10.00;//浮点数不能直接取模 ,要转成整数
- xianshi[0]=vol/1000;
- xianshi[1]=vol%1000/100;
- xianshi[2]=vol%100/10;
- xianshi[3]=vol%10;
-
- if( voltage>12.550)
- {
- M=0;//过压灯
- N=1;
- LED=1;
- timeL=timeL+0x05;
- timeH=timeH+0x05;
- START=1;
- LED=0;
- }
- if(voltage<11.051)
- {
- N=0;//欠压灯
- M=1;
- LED=1;
- timeL=timeL-0x17;
- timeH=timeH-0x17;
- START=1;
- }
- /*******
- if(voltage>=11.201&&voltage<=11.855)
- {
- M=1;
- N=1;
- LED=1;
- timeL=timeL-0x01;
- timeH=timeH-0x01;
- START=1;
- }
- ***************/
-
- }
- //*****************************************
-
- void delayms(uint k)
- {
- uint data i,j;
- for(i=0;i<k;i++)
- {
- for(j=0;j<600;j++)
- {;}
- }
- }
|
|









 QQ好友和群
QQ好友和群 QQ空间
QQ空间 腾讯微博
腾讯微博 腾讯朋友
腾讯朋友 收藏
收藏 淘帖
淘帖 顶
顶 踩
踩

